




关于智能机器人自主乘梯系统的技术协议和设备清单问题。需要解析多奥梯控系统的通讯协议细节、数据格式规范以及配套硬件设备的功能与配置要求,以便实现机器人与电梯的自动化交互。
- 多奥梯控系统的TCP和RS485通讯协议详细规范,包括数据帧格式、指令编码规则和状态反馈机制
- 梯控系统与机器人交互的完整流程,包括呼梯、门控、状态查询等关键环节的时序逻辑
- 各硬件组件的技术参数和安装要求,如梯控主板、扩展板、传感器等设备的功能特性
- 不同通讯协议下的异常处理机制和系统容错能力
- 实际应用案例中梯控系统与各类机器人(AGV/AMR/机器狗)的集成经验
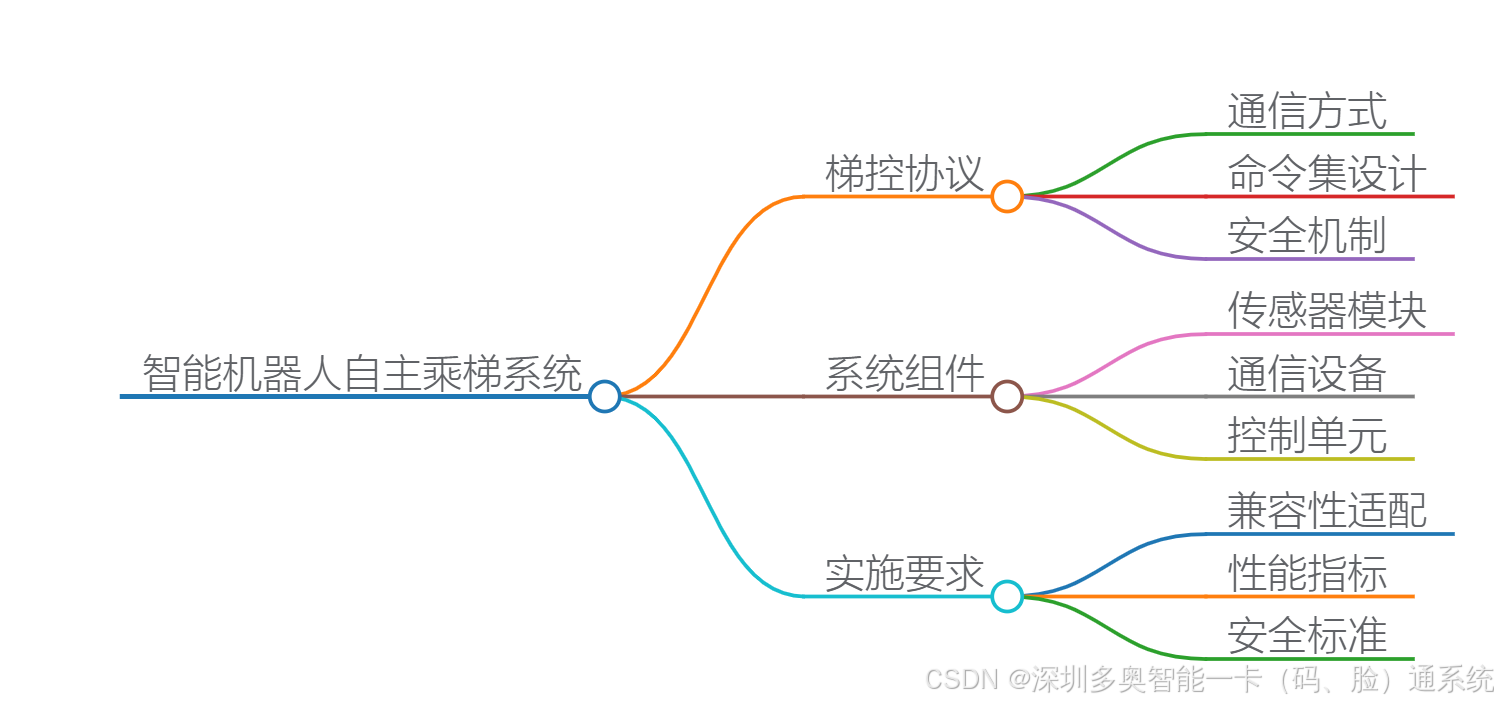
智能机器人(AGV/AMR/机器狗)自主乘梯系统通过梯控协议实现机器人与电梯的无缝对接,确保安全高效的跨楼层运输。多奥梯控系统作为行业领先方案,提供了完整的协议支持与硬件配置,以下是详细说明:
一、系统通信协议详解
1. TCP通信协议
- 架构模式:梯控为服务器,机器人为客户端,通讯端口默认30001(可自定义)
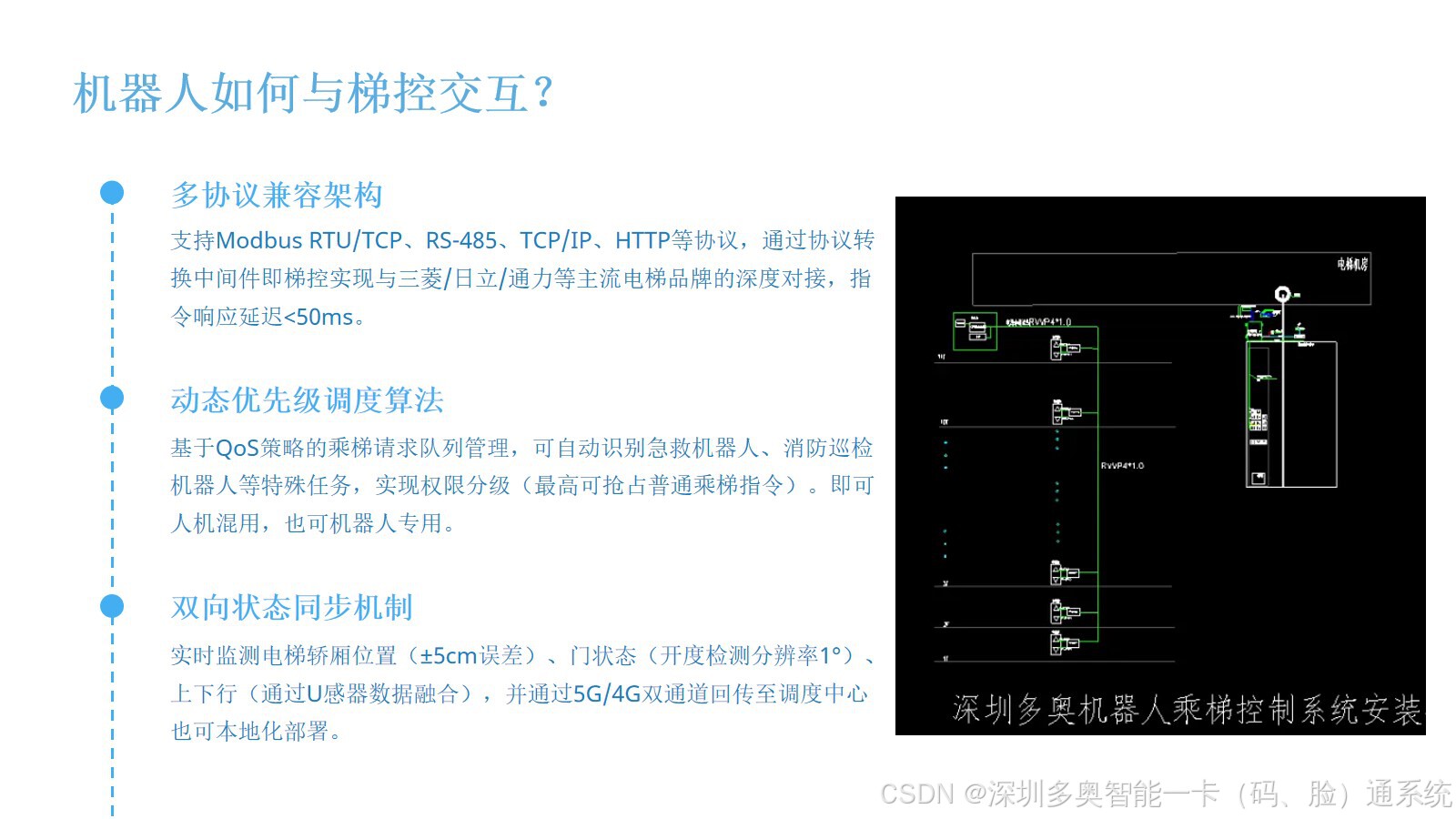
- 协议类型:支持Modbus TCP、HTTP API、MQTT等多种协议,梯控可作主机,机器人作从机(角色可互换)
- 数据格式:采用JSON结构化数据传输,示例:
{
"command": "IN_CALL",
"elevator_id": "DAIC-001",
"target_floor": 5,
"timeout": 60,
"timestamp": "2025-08-04T16:50:00Z"
}
- 响应机制:实时返回电梯状态,包括当前楼层、运行方向、门状态等关键信息
通讯方式
| 类型 | 拓扑结构 | 端口/参数 | 主从关系 |
|---|---|---|---|
| TCP | 梯控服务器 ↔ 机器人客户端 | 端口号:30001(可配置) | 梯控主机 ↔ 机器人从机(可互换) |
| RS-485 | 全双工串行通讯 | 波特率:9600bps;数据位:8;停止位:1;无校验 | 需实时双向反馈电梯状态 |
{ "cmd": "指令类型", "params": { "current_floor": "当前楼层", "target_floor": "目标楼层", "priority": "优先级(0-普通,1-紧急,2-VIP)" } }
2. RS-485通信协议
- 物理层参数:1位起始位、8位数据位、1位停止位、无校验、低位(LSB)在先,波特率9600Bps
- 通信方式:需双工通讯且实时反馈电梯运行状态
- 数据交互:
- 内召电梯:写寄存器40001(值=目标楼层BCD码)
- 门常开控制:写寄存器40005(值=保持秒数,最大30秒)
- 门立即关闭:写寄存器40006(值=0x55AA)
- 安全机制:指令需附带
robot_id及CRC16校验码,防止非法接入
基础控制指令
| 指令类型 | 功能描述 | 参数说明 | 返回值 |
|---|---|---|---|
CALL_ELEVATOR | 召唤电梯到当前楼层 | current_floor(当前楼层) | 0(成功)/非0(失败) |
SET_TARGET_FLOOR | 设置电梯目标楼层 | target_floor(目标楼层) | 0(成功)/非0(失败) |
KEEP_DOOR_OPEN | 保持电梯门开启 | duration(持续时间,秒) | 0(成功)/非0(失败) |
CANCEL_KEEP_DOOR | 取消保持开门状态 | - | 0(成功)/非0(失败) |
梯控协议是机器人与电梯控制系统之间的通信规范,用于交换状态信息和控制命令。协议需确保低延迟、高可靠性和安全性。系统通过独立传感器网络实时监测电梯状态,并实现自主呼叫和登记操作。协议通常基于工业标准(如Modbus、CAN bus)或专有无线协议(如Wi-Fi、蓝牙),内容涵盖以下关键方面:
-
协议架构:
-
通信层:采用客户端-服务器模型,机器人作为客户端,电梯控制系统作为服务器。通信通过无线网络(如802.11 Wi-Fi)实现,确保实时数据传输。
-
数据格式:使用轻量级格式,如JSON或二进制协议。例如,状态查询命令格式为:
Command:"type": "status_query", "params": "elevator_id": 1 Command:"type": "status_query", "params": "elevator_id": 1
响应格式为:
Response:"current_floor": 3, "door_status": "open", "timestamp": 1620000000 Response:"current_floor": 3, "door_status": "open", "timestamp": 1620000000
这允许机器人获取实时楼层和门开关状态。
-
-
核心命令集(基于多奥梯控API示例):
-
状态查询命令:机器人发送请求获取电梯当前状态(如楼层、门开关)。命令示例:get_elevator_status(elevator_id)get_elevator_status(elevator_id)。
-
呼叫电梯命令:机器人发起呼叫,指定当前楼层。命令示例:call_elevator(current_floor)call_elevator(current_floor),电梯响应是否成功。
-
登记目的楼层命令:机器人进入轿厢后,发送目的楼层信息。命令示例:register_destination(destination_floor)register_destination(destination_floor)。
-
错误处理命令:处理超时或故障,如 error_response(code,message)error_response(code,message),确保容错性。
-
-
安全机制:
-
认证与加密:使用TLS/SSL协议加密数据传输,防止未授权访问。机器人需提供数字证书(例如,基于RSARSA算法)进行身份验证。
-
超时与重试:设置超时阈值(如ttimeout=5秒ttimeout=5秒),超时后自动重试,提升可靠性。
-
-
协议工作流程(典型AGV乘梯场景):
-
机器人检测到电梯需求 → 发送呼叫命令 → 电梯响应并开门 → 机器人进入 → 发送登记命令 → 电梯运行至目的楼层 → 机器人退出。
-
整个过程依赖实时数据交换,确保高效性(响应延迟通常小于100ms100ms)。
-
二、机器人自主乘梯全流程

1. 所在楼层呼梯流程
graph LR
A[机器人发送呼梯指令] --> B{电梯是否在目标楼层}
B -->|否| C[电梯运行至目标楼层]
C --> D[电梯开门]
D --> E[持续发送开门指令30秒]
E --> F[检测电梯关门状态]
F --> G[发送目标楼层指令]
G --> H[不间断轮询电梯运行状态]
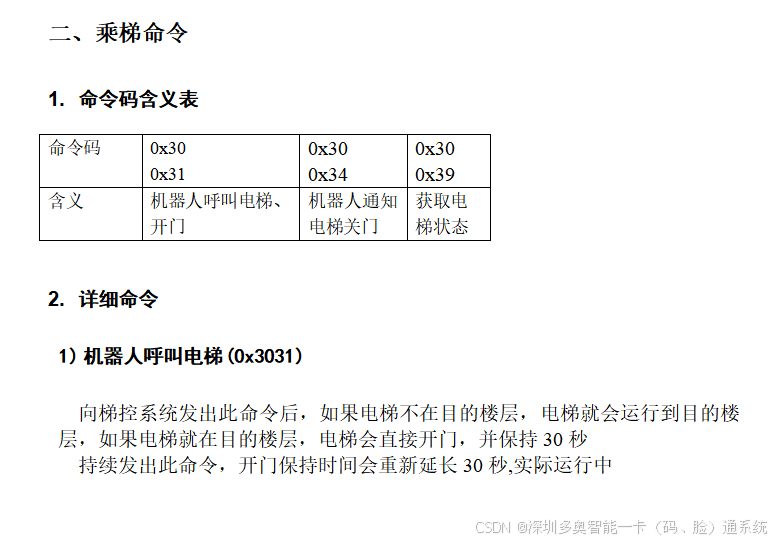
- 呼梯请求:机器人发送目标楼层指令(如1F)
- 电梯响应:电梯运行至指定楼层并保持开门状态(默认60秒,可调)
- 状态监测:机器人通过梯控系统实时查询轿厢运行状态
- 关键操作:机器人持续发送开门指令,确保在轿厢内时电梯保持开启

2. 目的楼层乘梯流程
graph LR
A[机器人发送呼梯指令] --> B{电梯是否在目标楼层}
B -->|是| C[电梯直接开门]
C --> D[持续发送开门指令30秒]
D --> E[检测电梯开门状态]
E --> F[机器人出轿厢]
F --> G[不间断轮询电梯运行状态]
- 内呼登记:机器人进入轿厢后发送目标楼层指令(如2F)
- 电梯运行:梯控系统触发目标楼层内呼,电梯运行至目标楼层
- 安全机制:到达目标楼层后,电梯自动开门并保持开启,机器人持续发送开门指令确保安全出轿
- 状态反馈:机器人实时监测电梯开门状态,确认安全后出轿厢

梯操作逻辑
| 场景 | 交互流程 | 关键指令 |
|---|---|---|
| 电梯不在目的层 | 1. 机器人发送呼梯指令至当前层(如1F)→ 2. 电梯到达后开门 → 3. 循环发送开门指令(确保机器人进轿厢)→ 4. 检测关门状态后发送目标楼层 → 5. 轮询电梯运行状态 | 开门指令循环间隔:≤30秒(维持开门状态) |
| 电梯已在目的层 | 1. 机器人发送目的层指令(如2F)→ 2. 电梯直接开门 → 3. 循环发送开门指令(确保安全出厢)→ 4. 检测开门状态后离开 → 5. 实时轮询运行状态 | 开门保持时间:30秒(可依电梯性能调整) |
flowchart TD
A[机器人需要乘梯] --> B[机器人向梯控系统<br>发送召梯请求]
B --> C[梯控系统调度电梯<br>到达机器人所在楼层]
C --> D[电梯到达并开门]
D --> E[机器人循环查询电梯门状态]
E --> F{门是否完全开启?}
F -- 是 --> G[机器人安全进入轿厢]
F -- 否 --> E
G --> H[机器人发送目标楼层指令]
H --> I[电梯运行至目标楼层]
I --> J[机器人循环查询电梯门状态]
J --> K{门是否完全开启?}
K -- 是 --> L[机器人安全离开轿厢]
K -- 否 --> J
L --> M[任务完成]

3. 特殊场景处理
- 电梯已在目标楼层:直接开门,无需等待电梯运行
- 开门时间延长:持续发送指令可延长开门时间(每次延长3秒)
- 人机混用冲突:系统自动检测并优先保障人员安全,机器人任务暂停
三、梯控系统核心设备清单
设备清单及功能说明
| 序号 | 设备名称 | 型号 | 单位 | 核心功能 |
|---|---|---|---|---|
| 1 | 机器人梯控主板 | DAIC-TK-K | 套 | 协议解析中枢,协调机器人-电梯通信逻辑 |
| 2 | 梯控触点扩展板 | DAIC-TK-MB | 套 | 扩展I/O接口,兼容多品牌电梯继电器信号 |
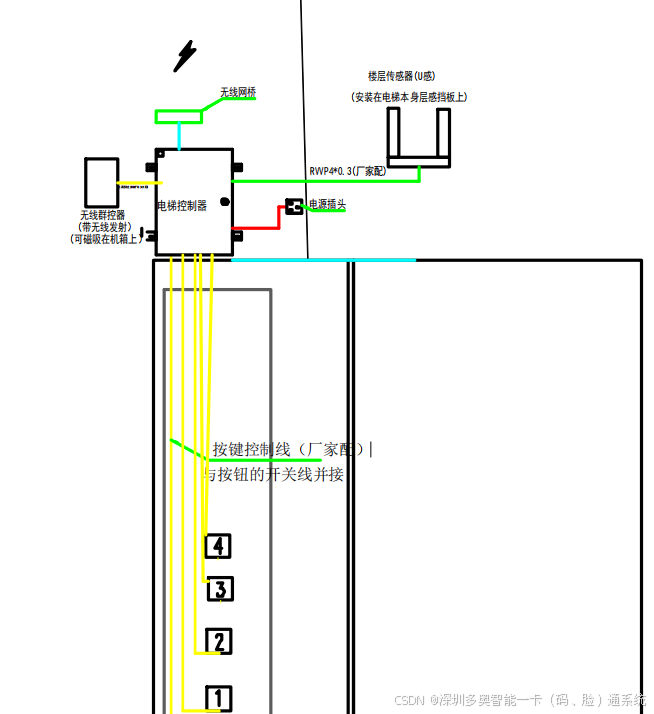
| 3 | 按键线 | 定制 | 套 | 物理连接电梯按键面板与梯控主板(光耦隔离防干扰) |
| 4 | 楼层传感器 | DAIC-LC-JC | 对 | 磁感应或光电定位,精确判定机器人所在楼层 |
| 5 | 无线收发器 | DAIC-LC-CT | 套 | 解决跨楼层通讯延迟,支持WiFi/4G双模传输 |
| 6 | 外呼控制器 | DAIC-LC-WH | 个 | 嵌入电梯外呼面板,接收机器人召梯请求 |
| 7 | 外呼机箱电源 | DAIC-LC-P | 个 | 独立供电模块(DC 12V/2A),确保外呼系统稳定运行 |
| 8 | 信号采集器 | DAIC-LC-CJ | 块 | 实时采集电梯运行/开关门/故障状态并反馈至机器人 |
1. 控制中枢模块
- 机器人梯控主板(DAIC-TK-K):系统核心,处理AGV与电梯通信及控制逻辑,支持Modbus TCP/MQTT协议
- 梯控触点扩展板(DAIC-TK-MB):扩展楼层控制信号输入输出,单板支持16层控制,最大可扩展至64层
- 按键线(定制):连接扩展板与电梯按键,长度约6米(客梯)/8米(货梯)
2. 状态感知模块
- 楼层传感器(DAIC-LC-JC):获取电梯实时所在楼层及平层状态,采用光电或磁感应原理
- 开关门检测器:实时监测电梯轿厢门的开、关及到位状态,有源接近开关或激光测距
- 人体/货物检测器(DAIC-DT-RT):探测轿厢内是否有人员或其他活体滞留,保障机器人专梯专用安全
- 激光测距/陀螺仪:辅助检测电梯运行姿态、平层精度,或检测轿厢内货物高度
3. 交互与执行模块
- 外呼控制器(DAIC-LC-WH):控制电梯按钮,包括楼层按钮和开门按钮
- 外呼机箱电源(DAIC-LC-P):为外呼控制器统一供电
- 信号采集器(DAIC-LC-CJ):接入传感器,处理传感器信息,并和机器人进行交互
- 联网器:接入路由器或交换机,乘梯设备接入网络用
以下是实现智能机器人自主乘梯所需的设备清单及其简要说明:
|
序号 |
设备名称 |
型号 |
数量单位 |
|
1 |
机器人梯控主板 |
DAIC - TK - K |
套 |
|
2 |
梯控触点扩展板 |
DAIC - TK - MB |
套 |
|
3 |
按键线 |
定制 |
套 |
|
4 |
楼层传感器 |
DAIC - LC - JC |
对 |
|
5 |
无线收发器 |
DAIC - LC - CT |
套 |
|
6 |
外呼控制器 |
DAIC - LC - WH |
个 |
|
7 |
外呼机箱电源 |
DAIC - LC - P |
个 |
|
8 |
信号采集器 |
DAIC - LC - CJ |
块 |
- 机器人梯控主板(DAIC - TK - K):作为整个梯控系统的核心,它负责处理机器人与梯控之间的通讯和控制指令,协调各个设备的工作。
- 梯控触点扩展板(DAIC - TK - MB):用于扩展梯控系统的触点数量,以满足不同的控制需求。
- 按键线(定制):定制的按键线能够根据实际的安装和使用需求进行设计,确保与其他设备的连接稳定可靠。
- 楼层传感器(DAIC - LC - JC):通过对楼层的精确感应,为机器人提供准确的楼层信息,帮助其判断自身位置和电梯的运行状态。
- 无线收发器(DAIC - LC - CT):实现无线通讯功能,方便机器人与梯控系统之间的数据传输,提高系统的灵活性和可扩展性。
- 外呼控制器(DAIC - LC - WH):负责处理机器人的外呼指令,将其转化为电梯能够识别的信号。
- 外呼机箱电源(DAIC - LC - P):为外呼控制器等设备提供稳定的电源供应,确保其正常工作。
- 信号采集器(DAIC - LC - CJ):用于采集电梯的各种运行状态信号,如开关门状态、楼层位置等,并将这些信号传输给梯控主板进行处理。
系统组件清单详细说明
系统清单包括硬件和软件组件,这些元素共同支持梯控协议的实现。清单基于模块化设计,确保可扩展性和易部署。强调传感器网络的核心作用,指出AMR的嵌入式控制系统是关键。以下是全面清单:
-
硬件组件:
组件类别 具体项目 功能描述 数量/规格示例 传感器模块 激光雷达(LiDAR) 实时监测电梯位置和门开关状态1 分辨率:0.1∘0.1∘ 红外传感器 检测轿厢内障碍物,确保机器人安全进出 检测范围:2m 惯性测量单元(IMU) 提供机器人姿态数据,辅助导航 精度:±0.5∘±0.5∘ 通信设备 Wi-Fi/蓝牙模块 实现机器人与电梯控制系统的无线通信 兼容802.11ac, 带宽1Gbps 网关设备 协议转换(如Modbus转TCP/IP),用于老旧电梯集成 1台 per elevator 控制单元 嵌入式控制器(如Raspberry Pi) 运行梯控协议逻辑,处理命令和响应2 CPU: ARM Cortex-A72 电源管理模块 提供稳定供电,支持电池备份 输入电压:24V DC -
软件组件:
组件类别 具体模块 功能描述 技术栈示例 协议栈 梯控协议实现库 封装命令集(如呼叫、登记),处理数据序列化 Python/C++, JSON格式 安全认证模块 管理加密(AES-256AES-256)和身份验证 OpenSSL集成 导航系统 路径规划算法 动态规划机器人移动路径,避开障碍2 A*算法, ROS框架 状态监控界面 可视化电梯状态(如current_floorcurrent_floor值) Web-based UI, React 集成工具 API接口 提供RESTful API供外部系统调用,例如:POST /call_elevatorPOST /call_elevator Swagger文档化 日志与诊断模块 记录事件,支持故障排查(如超时错误) ELK Stack集成
详细说明了每个核心部件在实现上述流程中的具体作用和功能。
|
设备类别 |
设备名称 |
型号示例 |
在机器人乘梯流程中的核心作用 |
|---|---|---|---|
|
控制中枢 |
机器人梯控主板 |
DAIC-TK-K |
系统的“大脑”。接收并解析机器人的乘梯请求,根据电梯状态进行逻辑判断,然后向执行部件发出控制指令。它负责运行您提到的通信协议。 |
|
执行机构 |
梯控触点扩展板 |
DAIC-TK-MB |
系统的“手”。接收主控板指令,通过无源干触点方式,安全地“按下”电梯轿厢内的目标楼层按钮。与电梯电路完全电气隔离,保障安全。 |
|
状态感知 |
楼层传感器 & 信号采集器 |
DAIC-LC-JC & DAIC-LC-CJ |
系统的“眼睛”。实时精准检测电梯所在的楼层位置、运行方向(上/下/停止) 以及平层状态,为调度提供决策依据。 |
|
召梯控制 |
外呼控制器 |
DAIC-LC-WH |
系统的“召唤臂”。接收主控板指令,模拟按下电梯厅的上/下外呼按钮,将电梯召唤至机器人所在楼层。 |
|
通信链路 |
无线收发器 |
DAIC-LC-CT |
系统的“神经网络”。用于在电梯轿厢和电梯机房/井道之间建立稳定的通信链路,避免使用随行电缆,安装更灵活可靠。 |
|
定制线材 |
按键线 |
定制 |
实现免破线安装的关键。根据电梯品牌和操作面板型号定制,直接对插,无需剪线,安全且不影响电梯原厂维保。 |
|
能源保障 |
外呼机箱电源 |
DAIC-LC-P |
系统的“心脏”。为所有控制设备提供稳定、洁净的DC12V电源,适应电梯井道环境。 |
四、系统关键特性与优势
1. 安全机制
- 人机隔离:人体检测器与AGV调度系统联动,当检测到轿厢内有人时,自动锁定AGV呼梯权限
- 模式切换:通过手动/自动切换开关选择运行模式,自动模式下由调度服务器统一分配电梯使用权
- 消防联动:接收无源干接点消防信号后,系统自动脱离电梯控制,恢复原状态
安全控制指令
| 指令类型 | 功能描述 | 参数说明 | 返回值 |
|---|---|---|---|
ENTER_AGV_MODE | 进入 AGV 专用模式 | - | 0(成功)/非0(失败) |
EXIT_AGV_MODE | 退出 AGV 专用模式 | - | 0(成功)/非0(失败) |
EMERGENCY_STOP | 紧急停止电梯运行 | - | 0(成功)/非0(失败) |
2. 精准控制
- 定位精度:激光定位器确保机器人停靠误差≤50mm,满足狭窄轿厢内的安全通行需求
- 状态监测:实时获取轿厢的实际运行状态和电梯门的状态,如开/关及楼层信息
- 动态调度:基于深度强化学习(DRL)的派梯策略,综合电梯负载、机器人优先级、能耗等参数优化路径
状态查询指令
| 指令类型 | 功能描述 | 参数说明 | 返回值 |
|---|---|---|---|
GET_ELEVATOR_STATUS | 查询电梯当前状态 | - | status(状态码,如:运行中 / 停止 / 开门) |
GET_CURRENT_FLOOR | 获取电梯当前楼层 | - | floor(当前楼层) |
GET_DOOR_STATUS | 查询电梯门状态 | - | 0(关闭)/1(开启) |
3. 部署灵活性
- 通信方式:支持WIFI、4G/5G、LoRa、蓝牙、ZigBee等多种无线通讯方式,以及RS485等有线通讯方式
- 部署模式:支持云端B/S架构和本地化部署调度服务器两种方式
- 兼容性:兼容通力、三菱、迅达等主流品牌电梯,无需电梯厂商开放私有协议
五、实施建议与注意事项
- 电梯状态要求:电梯需保持无休眠状态,确保梯控系统能实时获取电梯状态
- 电气隔离:梯控取电必须在前端,避免干扰电梯原有系统
- 安装规范:需在电梯机房和轿箱顶部附近提供交流220V电源,设备安装需专业电梯维护人员配合
- 测试验证:安装完成后需使用多奥测试工具验证机器人乘梯流程,确保各环节正常
- 安全冗余:建议采用双链路通讯(RS485+无线备份),避免单点故障导致系统失效
该系统已在医院、酒店、智能工厂等场景成功应用,实现电梯利用率提升40%,平均候梯时间缩短至8.3秒。通过"感知-控制-通信"的架构设计,多奥梯控系统为AGV/AMR机器人提供了安全可靠的跨楼层运输解决方案,显著提升了物流自动化效率。


















 934
934

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











