





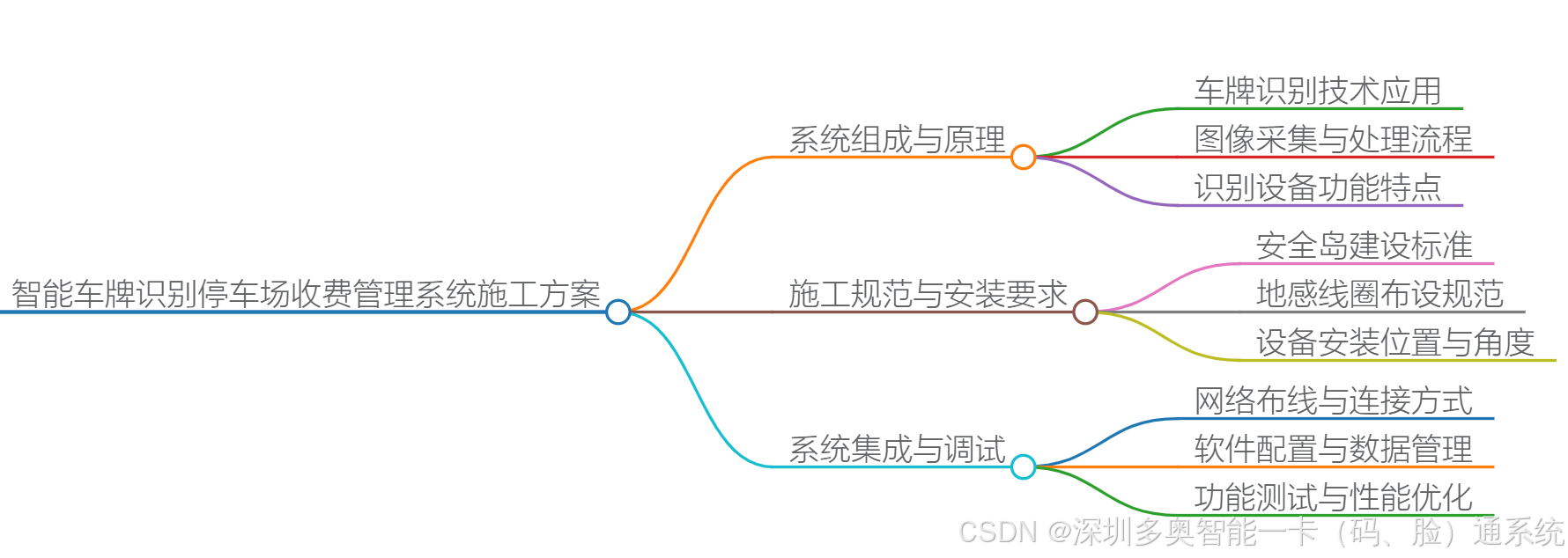
智能车牌识别停车场收费管理系统施工方案
一、工程概况
1. 系统简介
本工程采用 DACP-TC-SF 标准车牌识别收费管理系统,基于嵌入式智能高清识别技术,集成图像采集、车牌定位、字符分割、识别算法四大核心模块,实现车辆自动识别、图像对比、自动收费、固定车无感通行等功能,适用于标准停车场出入口管理场景。
2. 核心设备清单
|
设备名称 |
型号规格 |
数量 |
功能说明 |
|
车牌识别一体机 |
DACP-TC-YTJ |
按出入口配置 |
集成识别、摄像、补光、前端储存 |
|
道闸 |
DACP-TC-DZ |
按出入口配置 |
车辆放行控制 |
|
雷达 |
DACP-TC-LD |
按出入口配置 |
车辆检测辅助 |
|
显示一体机 |
配套 |
按出入口配置 |
车牌信息、收费金额显示 |
|
地感线圈 |
DACP-TC-DGXQ |
按车道配置 |
车辆触发检测 |
|
地感检测器 |
DACP-TC-DG |
按线圈数量配置 |
线圈信号处理 |
|
服务器 |
配套 |
1 台 |
数据存储、系统管理 |
|
管理电脑 |
配套 |
1 台 |
人工操作、参数配置 |
|
软件加密狗 |
配套 |
1 个 |
系统授权 |
|
手动按钮 |
选装 |
按岗亭配置 |
道闸手动控制 |
3. 适用环境要求
- 车道条件:标准车道无弯角,单车道宽度≤4.5m;弯角路段需保证车牌转正后识别距离达标
- 识别范围:最佳识别距离 4-5m,车牌平行角度≤15°,斜面角度≤45°
- 环境规避:避开雨水井盖、防护栏;无法规避时将护栏涂成与环境同色

二、施工准备
1. 现场勘查
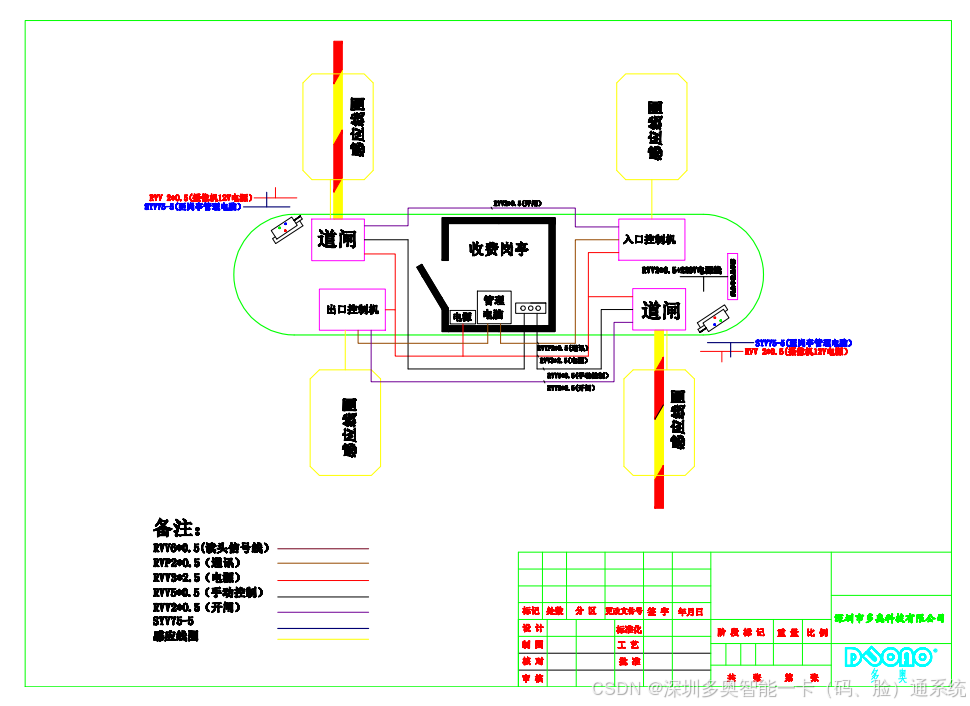
- 确认出入口车道尺寸、弯角角度、路面障碍物分布,划定安全岛位置及尺寸
- 核实供电接口位置、岗亭位置,规划管线走向,避免与其他设施冲突
- 检测现场光照条件,确定补光设备安装辅助方案(如需)
2. 设备材料清点
- 按设备清单核对所有设备型号、数量,确保无破损、无缺失
- 检查辅材质量:铁氟龙高温软导线(≥1.0mm)、超五类及以上网线、31.5mm/21.0mm/4*1.0mm 电线、镀锌管 / PVC 管、膨胀螺栓等,确保符合规格要求
- 工具准备:切割机、混凝土搅拌机、水平仪、万用表、压线钳、防水胶带、穿线器等
硬件组成
| 设备 | 型号 | 功能 |
|---|---|---|
| 车牌识别一体机 | DACP-TC-YTJ | 图像采集+识别+补光一体化 |
| 出入口道闸 | DACP-TC-DZ | 车辆通行控制(抬杆响应时间≤0.6秒) |
| 地感线圈 | DACP-TC-DGXQ | 车辆检测(铁氟龙导线,耐-40℃~120℃) |
| 毫米波雷达 | DACP-TC-LD | 辅助触发识别(雨雾天补偿) |
| 收费显示屏 | 定制LED屏 | 实时显示车牌、费用、支付二维码 |
3. 人员配置
- 施工负责人 1 名:统筹现场协调、质量管控
- 技术人员 2-3 名:设备安装、接线调试
- 施工人员 2-4 名:安全岛制作、管线埋设
三、主要施工流程及技术要求
1. 安全岛制作
(1)基础要求
- 材质配比:混凝土:石头:沙 = 1:2:3,保证强度达标
- 尺寸确定:根据现场出入口空间及设备安装位置,用墨线弹出安全岛轮廓(建议宽度≥0.5m,长度≥2m,高度≥0.15m)
- 预埋准备:
- 预留地感线圈进线孔(直径≥50mm)
- 预埋线管:按布线规划铺设镀锌管或 PVC 管,确保管线通畅
- 预埋膨胀螺栓:在道闸、相机、显示屏安装位置预设,间距符合设备固定要求
(2)施工步骤
- 基坑开挖:按墨线轮廓开挖,深度≥0.2m,平整基坑底部
- 钢筋铺设(可选):对于大型安全岛,铺设 Φ6mm 钢筋网增强强度
- 混凝土浇灌:按配比搅拌混凝土,均匀浇灌,用振动棒夯实,表面抹平
- 养护:自然养护≥7 天,确保混凝土强度达标后再进行设备安装
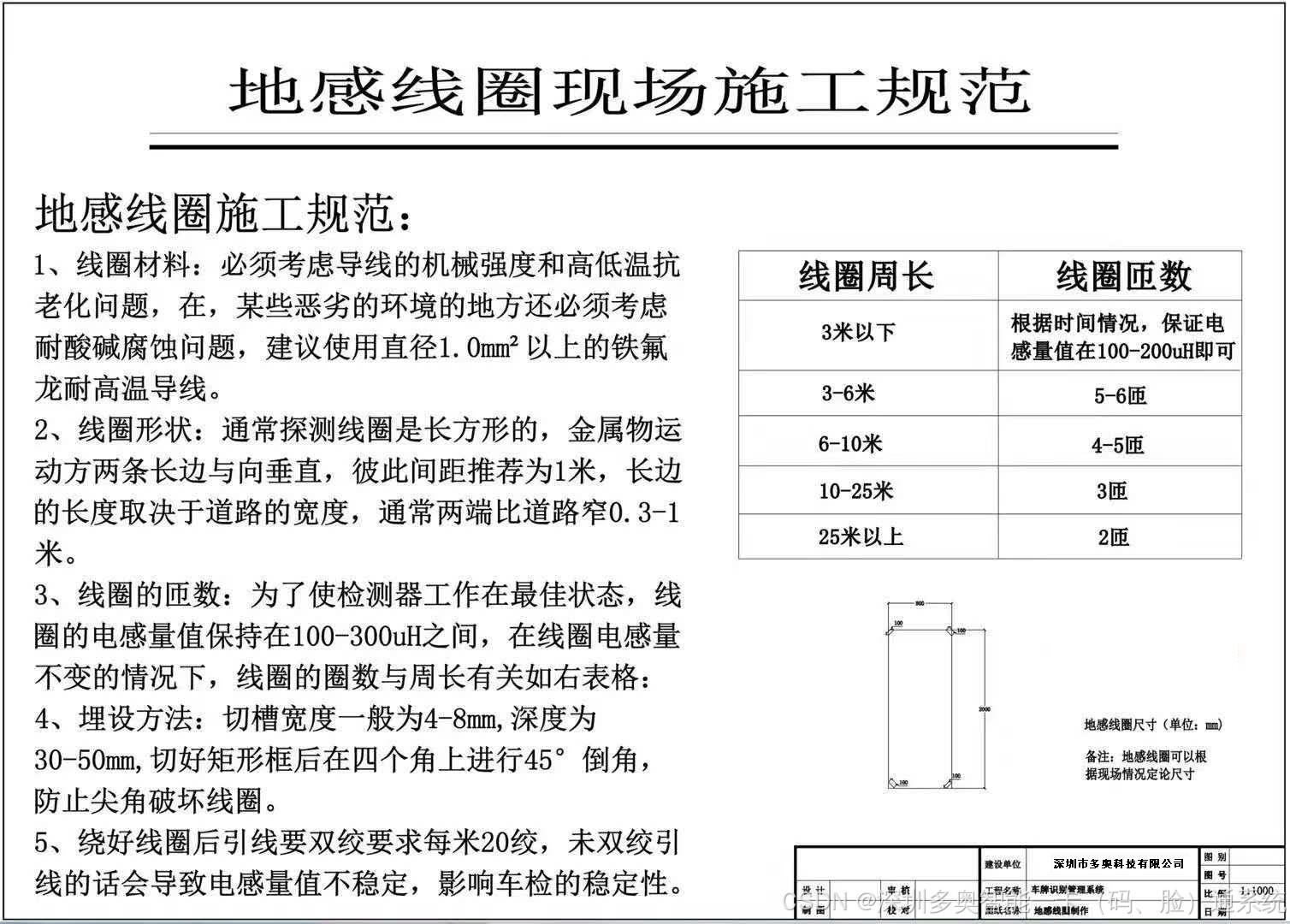
2. 地感线圈埋设
施工流程: 1. 切割路面:矩形槽宽4mm,深50mm,拐角45°倒角; 2. 布线:1.0mm²铁氟龙导线绕制3~4圈,总电感量80~150μH; 3. 封装:环氧树脂填充→固化后磨平路面(抗压强度≥20MPa)。
(1)材料要求
- 导线:采用≥1.0mm 铁氟龙高温软导线,具备抗老化、抗拉伸、耐酸碱腐蚀性能
(2)施工步骤
- 线圈开槽:在车道指定位置(道闸前 1-2m)开矩形槽,槽宽 5-8mm,深 30-50mm,线圈周长根据车道宽度调整(建议≥3m)
- 导线铺设:将导线均匀缠绕在槽内,匝数 4-6 匝,导线两端预留足够长度(≥1.5m),避免导线破损
- 槽体密封:铺设完成后用沥青或环氧树脂密封槽体,确保防水、牢固
- 线圈测试:用万用表检测线圈电感量,确保无短路、断路,电感值符合检测器要求
3. 管线预埋
- 线管材质:采用镀锌管或 PVC 管,转弯处采用弯头,确保管线弯曲半径≥10 倍管径
- 管线走向:按规划路径铺设,避开障碍物,强弱电管线分开铺设(间距≥0.3m),避免信号干扰
- 防水处理:所有线管接口处用防水胶带密封,线管两端预留≥0.2m 长度,方便接线
4. 设备安装
(1)车牌识别一体机安装
- 安装位置:安全岛前端,确保识别区覆盖 4-5m 区间,镜头对准车牌行驶方向
- 角度调整:通过水平仪校准,保证相机与车牌平行角度≤15°,斜面角度≤45°
- 固定方式:用膨胀螺栓将相机支架固定在安全岛预设位置,支架高度 1.5-2.0m,确保稳固
(2)道闸安装
- 安装位置:安全岛后端,与相机间距≥1.5m,确保道闸起落不影响车辆通行
- 水平校准:用水平仪调整道闸机体,确保水平、垂直,起落杆与车道垂直
- 固定要求:膨胀螺栓紧固,确保机体无晃动,起落杆运行平稳
(3)显示一体机安装
- 安装位置:靠近相机,便于驾驶员查看,高度 1.2-1.5m
- 固定方式:支架固定或壁挂安装,确保显示屏无反光、无遮挡
(4)其他设备安装
- 雷达:安装在相机旁,对准车道行驶方向,高度与相机一致
- 手动按钮(选装):安装在岗亭内,高度 1.2-1.5m,便于操作

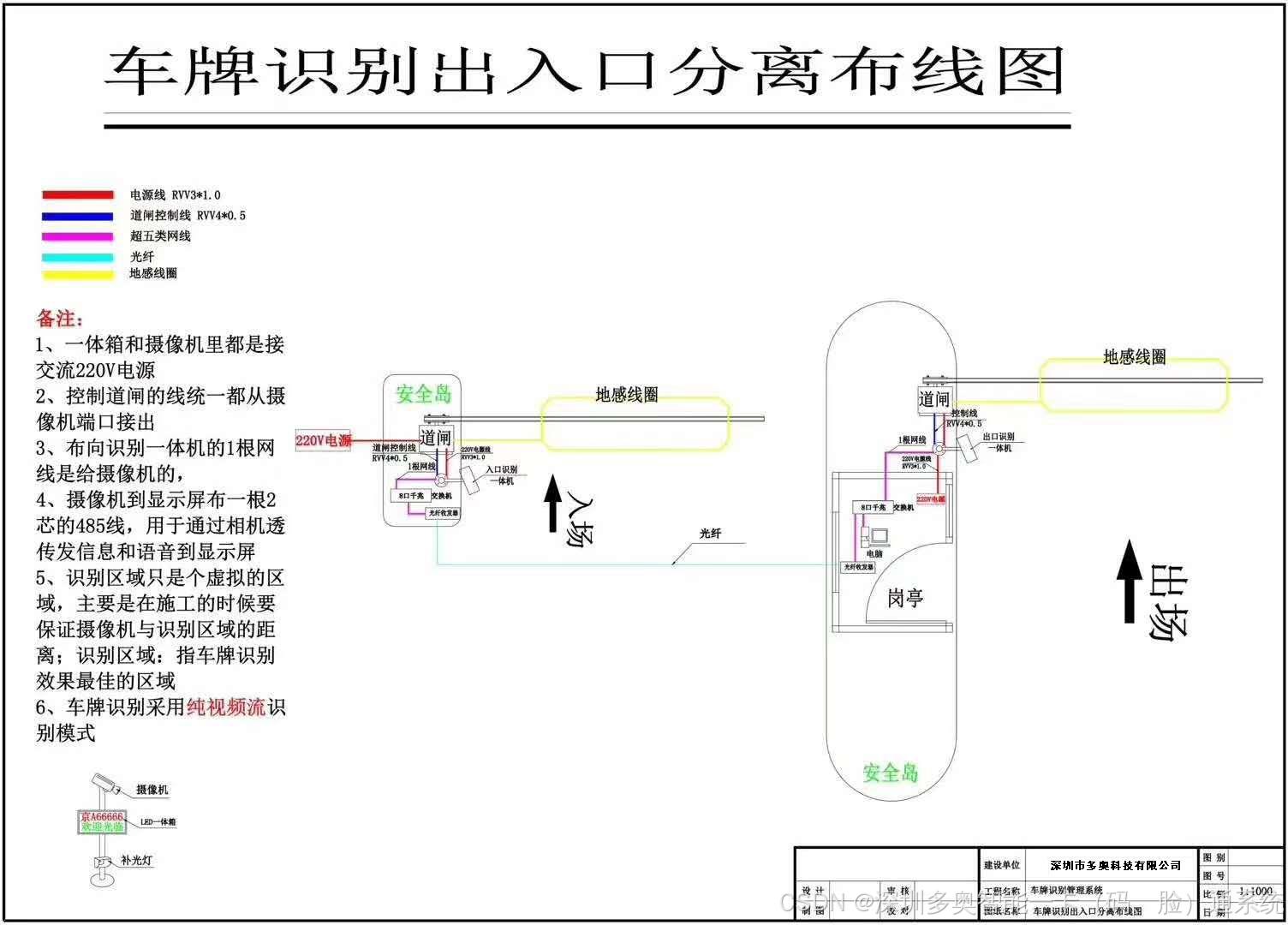
5. 布线接线
(1)线材规格要求
|
连接部位 |
线材规格 |
备注 |
|
相机至交换机 |
超五类及以上网线 |
确保传输速率 |
|
相机至道闸(开闸信号) |
2*1.0mm 电线 |
纯铜材质 |
|
相机 / 显示屏 / 道闸供电 |
3*1.5mm 电线 |
三相供电 |
|
道闸至岗亭手动按钮 |
4*1.0mm 电线 |
选装,纯铜材质 |
(2)布线规范
- 线材无破损、无打结、无绕线,预留≥0.5m 冗余长度
- 强弱电分开布线,交叉处采用垂直交叉,避免平行敷设
- 所有接线端子压接牢固,做好编号标识,便于后期维护
- 户外接线处做好防水处理:用防水胶带缠绕 3-5 层,外套防水套管
(3)接线要求
- 电源接线:严格区分火线、零线、地线,避免接反,接地电阻≤4Ω
- 信号接线:按设备说明书对应引脚连接,相机开闸信号与道闸信号接口匹配
- 接线完成后用万用表检测线路导通性,确保无短路、断路
6. 系统调试
(1)硬件调试
- 供电测试:接通 220V 电源,检查所有设备供电正常,无异常发热、异响
- 设备联动测试:触发地感线圈,相机识别车牌后,道闸自动抬杆,显示屏显示正确信息
- 手动控制测试:操作岗亭手动按钮,道闸起落正常,响应及时
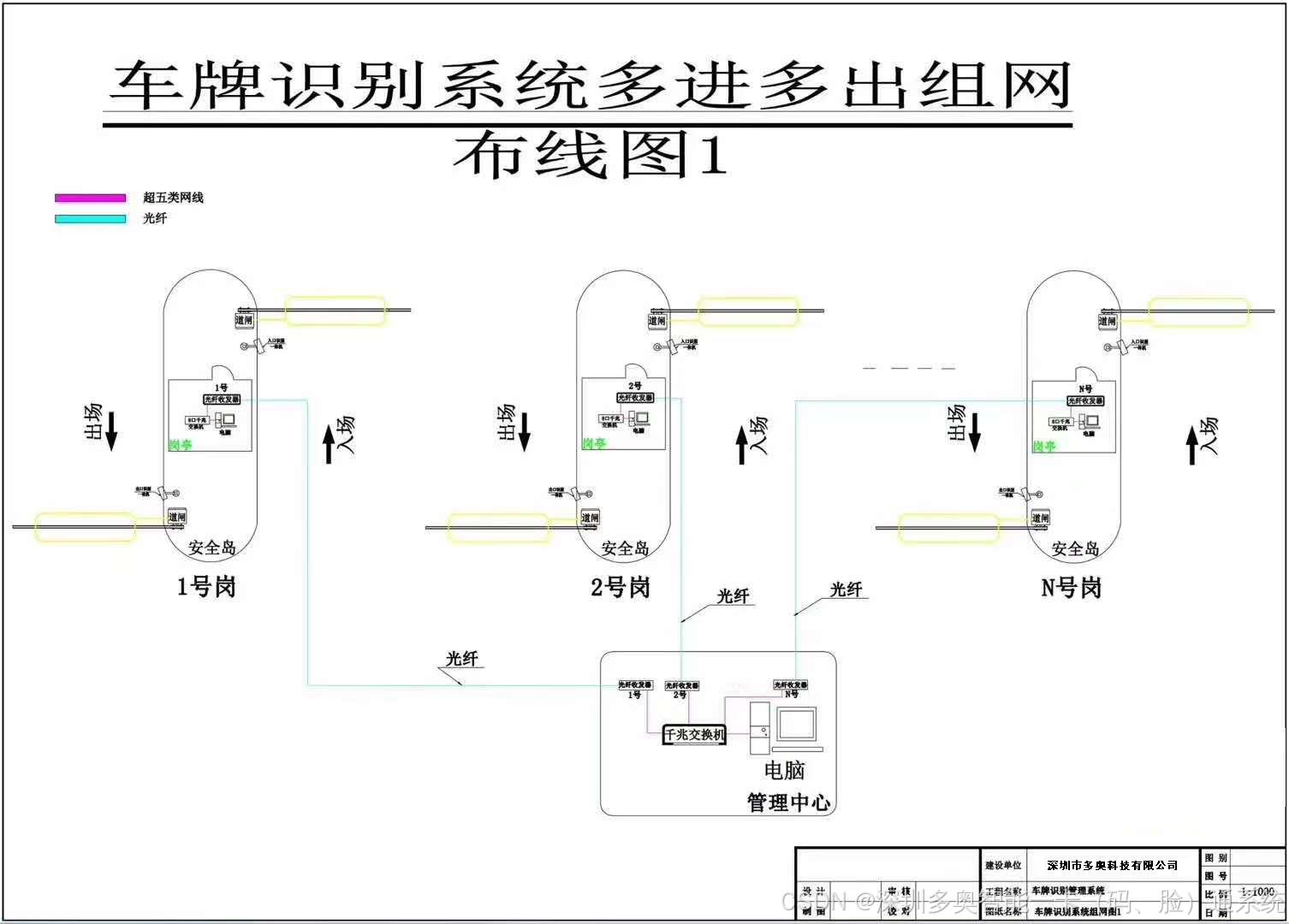
|
子系统 |
核心设备 |
型号示例 |
功能说明 |
|---|---|---|---|
|
入口/出口设备 |
车牌识别一体机 |
DACP-TC-YTJ |
集图像采集、车牌识别、前端存储、补光于一体。关键参数:识别距离4-5米,平行角度≤15°,斜面角度≤45°。 |
|
智能道闸 |
DACP-TC-DZ |
起落杆控制。关键参数:起落杆时间1.5-6秒可调,需带防砸功能。 | |
|
补光雷达 |
DACP-TC-LD |
触发相机抓拍,不受恶劣天气影响,比地感更灵敏、耐用。 | |
|
户外显示屏 |
- |
显示车牌、有效期、收费金额、缴费二维码等信息。 | |
|
管理中心 |
管理服务器/电脑 |
DACP-TC-SF |
安装停车场管理软件,负责数据存储、计费规则、报表生成。 |
|
停车场管理软件 |
DACP-TC-SF |
系统核心,负责设备管理、权限设置、收费规则、记录查询。 | |
|
软件加密狗 |
- |
软件授权与加密。 | |
|
基础辅件 |
地感线圈 |
DACP-TC-DGXQ |
材料:强烈建议采用≥1.0mm²铁氟龙高温软导线,耐高温、抗老化。 |
|
车辆检测器 |
DACP-TC-DG |
检测车辆,辅助触发道闸落杆和防砸。 |
(2)软件调试
- 系统安装:在管理电脑安装系统软件,插入加密狗授权
- 参数配置:设置车牌识别灵敏度、收费标准、固定车信息、开闸延时等参数
- 识别测试:用不同类型车辆(小型车、大型车)、不同光照条件下测试识别率,确保≥99%
- 数据测试:验证收费金额计算准确性、车辆进出记录完整性、图像对比功能正常
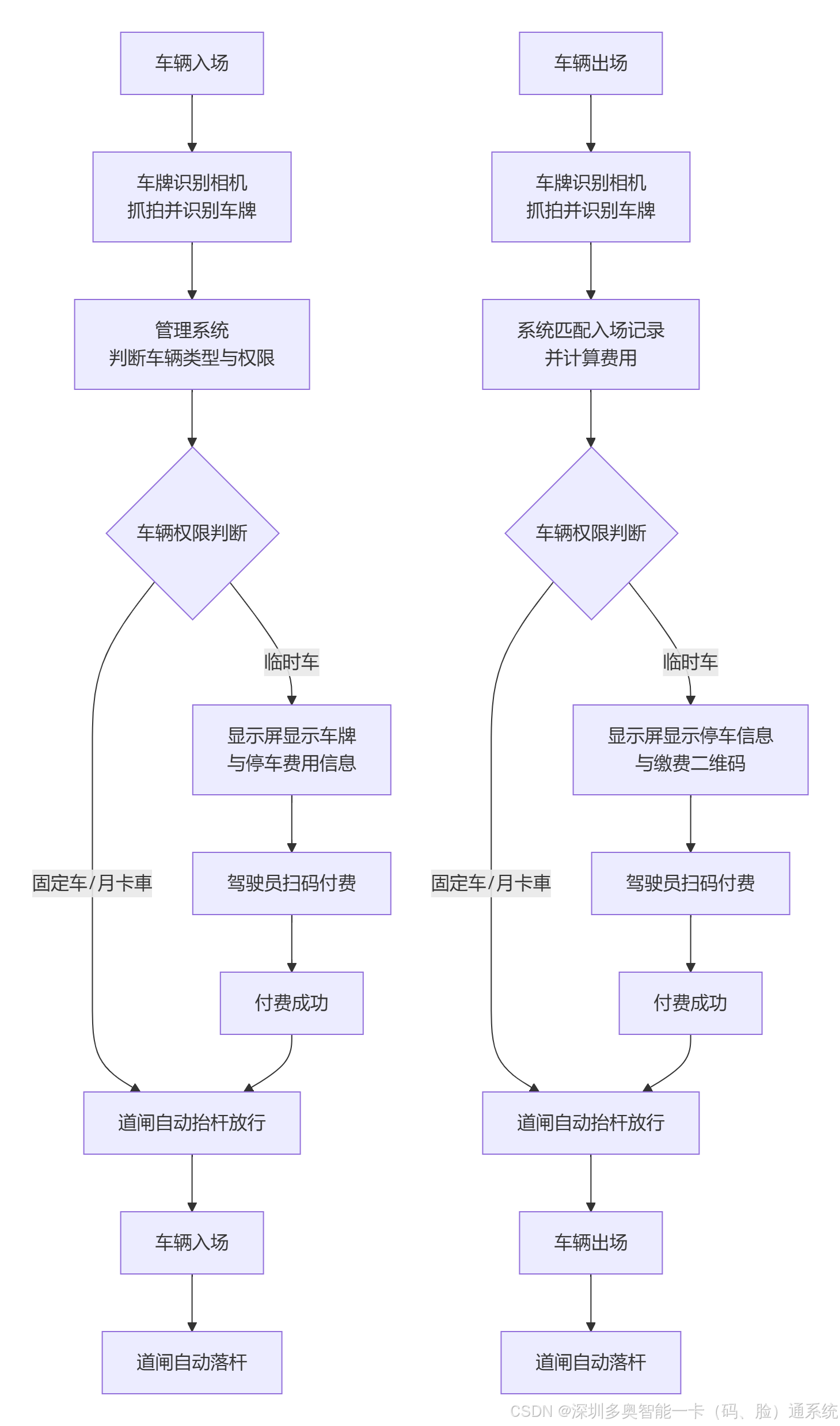
flowchart TD
A[车辆入场] --> B[车牌识别相机<br>抓拍并识别车牌]
B --> C[管理系统<br>判断车辆类型与权限]
C --> D{车辆权限判断}
D -- 固定车/月卡車 --> E[道闸自动抬杆放行]
D -- 临时车 --> F[显示屏显示车牌<br>与停车费用信息]
F --> G[驾驶员扫码付费]
G --> H[付费成功]
H --> E
E --> I[车辆入场]
I --> J[道闸自动落杆]
K[车辆出场] --> L[车牌识别相机<br>抓拍并识别车牌]
L --> M[系统匹配入场记录<br>并计算费用]
M --> N{车辆权限判断}
N -- 固定车/月卡車 --> O[道闸自动抬杆放行]
N -- 临时车 --> P[显示屏显示停车信息<br>与缴费二维码]
P --> Q[驾驶员扫码付费]
Q --> R[付费成功]
R --> O
O --> S[车辆出场]
S --> T[道闸自动落杆]
> 注意:线圈与金属物体距离≥0.5米,避免并行导线超过10米(信号衰减)。 #### 3.3 安全岛与道闸 - 安全岛尺寸:长度≥6米(含设备位+检修区),高出路面15cm; - 道闸安装:闸杆中轴线与车道中线重合,底座螺栓预埋深度≥100mm。 --- ### **四、管线敷设与接线** #### 4.1 强弱电隔离方案 | **线缆类型** | **走线路径** | **防护措施** | |----------------|-----------------------|----------------------------| | 220V供电线 | 镀锌钢管(φ32) | 钢管接地,接头防水胶密封 | | 信号线/网线 | PVC管(φ25) | 与强电管间距≥30cm | | 光纤 | 铠装金属软管 | 弯曲半径>15倍直径 | #### 4.2 终端接线规范 - **相机端**:网线采用568B线序,屏蔽层单端接地; - **道闸控制**:开闸信号线双绞并套磁环(抗电磁干扰); - **防雷保护**:所有外露线缆加装SPD浪涌保护器(40kA)。 --- ### **五、系统联调与测试** #### 5.1 识别性能优化 - **场景** | **应对措施** -----------------------|------------------ 大雨/雾天识别率下降 | 启用雷达辅助定位,补光调至红外模式 车牌污损/遮挡 | 关联数据库历史记录,AI智能补全 无牌车/摩托车 | 触发人工核验流程,抓拍驾驶员人脸 #### 5.2 压力测试项 - 连续通行测试:>200车次/小时(模拟高峰拥堵); - 断电恢复:UPS供电≥30分钟,数据自动续传。 --- ### **六、验收标准(参照GB/T 26765-2021)** 1. **功能项**:车牌识别正确率≥98%,计费误差<0.1%; 2. **安全项**:道闸防砸灵敏度(遇阻反弹≤0.5秒); 3. **耐久性**:设备MTBF(平均无故障时间)>20,000小时。 --- ### **七、运维保障方案** - **远程诊断**:4G模块上传设备状态(温度/电压/故障码); - **季度维护**: - 相机镜头除尘 + 灵敏度校准; - 地感线圈电感值检测(偏差>15%即更换)。 --- > **施工警示**: > 1. 弯道识别区需增设辅助相机,禁止单相机覆盖角度>45°; > 2. 地感线圈与钢筋间距不足时,需改用环形线圈检测器(避免金属干扰)。 本方案融合机械、电气、AI识别三大技术模块,通过分阶段施工管控(基础→设备→调试→验收),可适配各类地下/露天停车场场景,确保系统10年使用寿命。
四、质量控制措施
- 设备质量:所有设备必须有出厂合格证、检测报告,进场前严格检验,不合格产品禁止使用
- 施工质量:
- 安全岛混凝土强度达标,表面平整,无裂缝、蜂窝
- 地感线圈埋设牢固,密封防水,电感量符合要求
- 设备安装水平、垂直,固定牢固,无晃动
- 布线规范,接线正确,标识清晰,防水处理到位
- 系统性能:
- 车牌识别率≥99%,识别响应时间≤0.5s
- 道闸抬杆时间≤1.5s,运行平稳,无卡顿
- 收费计算准确率 100%,数据存储安全可靠
五、安全文明施工要求
- 安全防护:
- 施工人员佩戴安全帽、防滑鞋,高空作业系安全带
- 用电作业严格遵守电工规范,接线前断电,挂警示标识
- 施工现场设置警示标志,避免无关人员进入
- 文明施工:
- 施工垃圾及时清理,保持现场整洁
- 减少施工噪音、粉尘污染,避免影响周边环境
- 爱护设备材料,避免损坏、浪费
六、竣工验收标准
- 外观验收:设备安装整齐、美观,管线布置规范,无外露破损
- 功能验收:
- 车牌识别、自动收费、固定车通行等功能正常
- 设备联动协调,道闸、显示屏、相机工作同步
- 手动控制功能有效,应急处理机制完善
- 资料验收:
- 提供设备清单、产品合格证、检测报告
- 提供施工图纸、布线图、接线表
- 提供系统调试报告、操作手册
七、售后服务
- 质保期:设备及施工质保≥1 年,质保期内免费维修、更换故障部件
- 技术支持:提供 24 小时故障响应,48 小时内现场处理
- 培训服务:为用户提供系统操作、日常维护培训


















 128
128

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











