



前言:AGV/AMR/机器狗乘梯控制系统方案,该系统通过梯控与电梯门禁集成实现自动化设备无人化乘梯。核心功能包括自主呼梯、楼层切换及多场景门禁扩展,支持RS-485、MQTT等多种通讯协议。方案详细说明了乘梯流程、特殊场景处理及电梯改造要点,强调需保持电梯无休眠状态,并确保电气隔离。系统采用"感知-控制-通信"架构,可扩展至闸机等门控设备,构建智能通行生态。建议联系技术支持获取定制化方案,包括电梯适配确认、协议选择等具体实施细节。
一、核心功能与系统定位
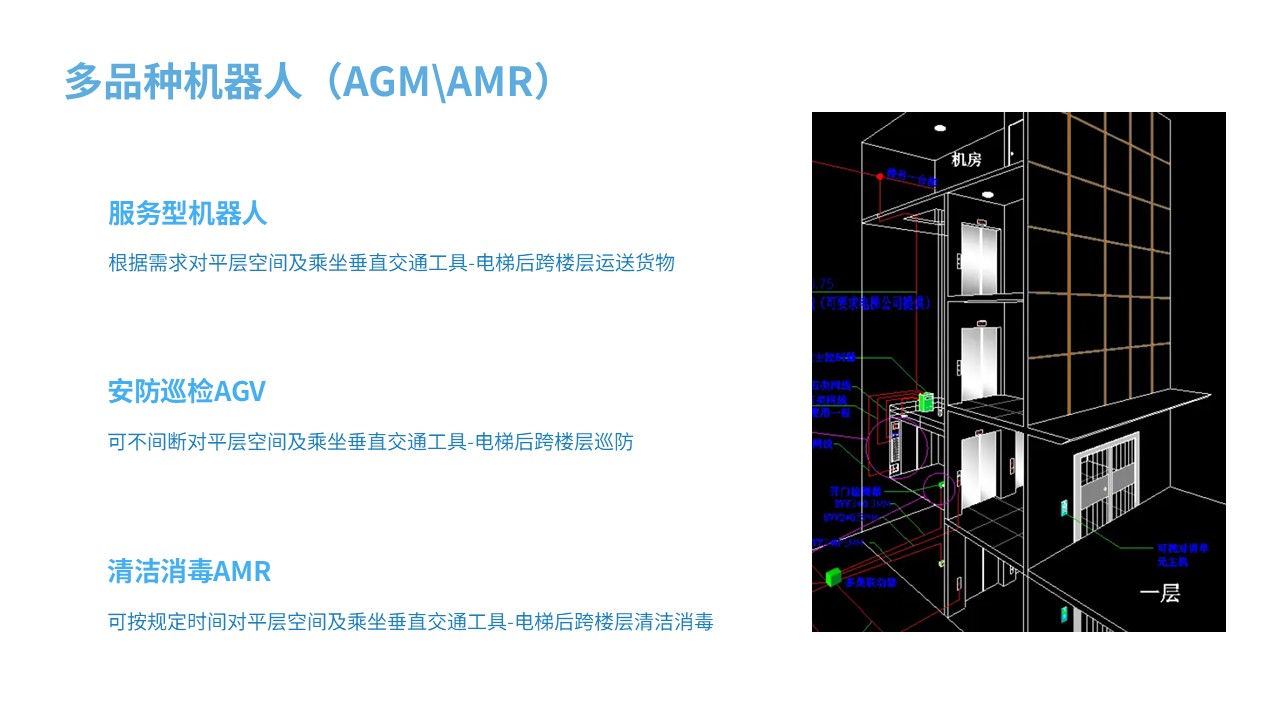
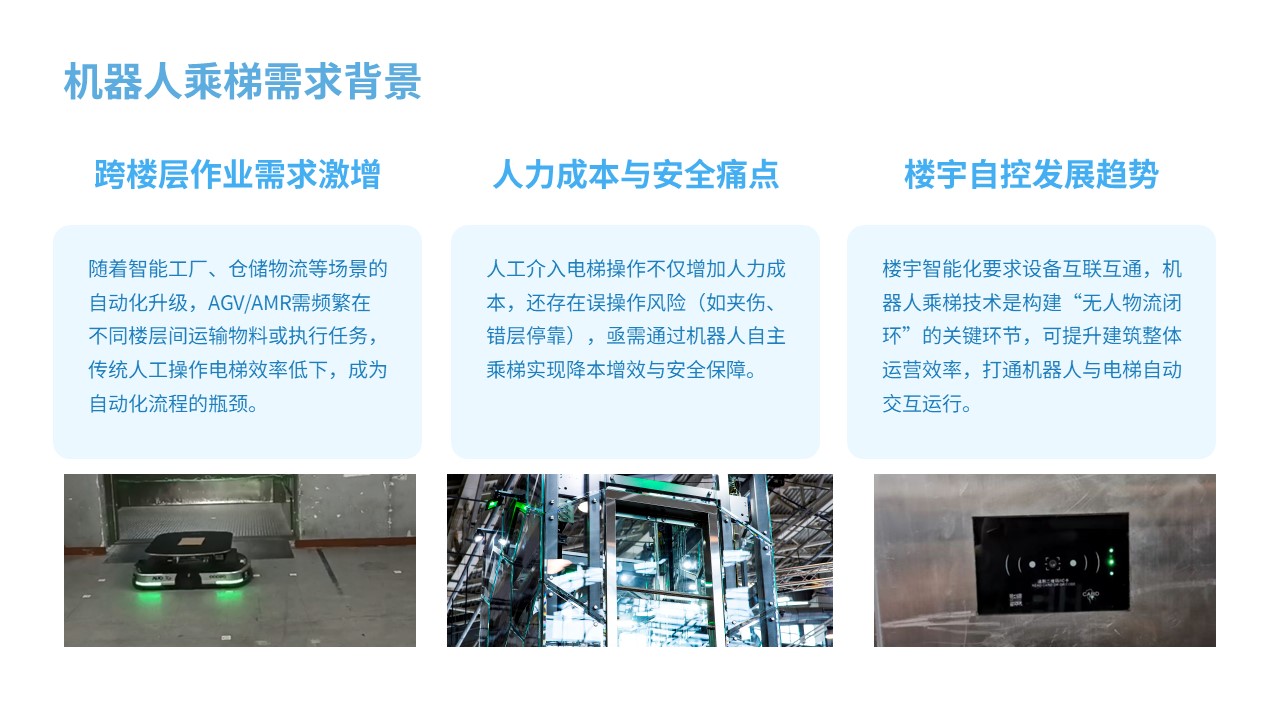
该系统旨在实现AGV、AMR、机器狗等自动化设备的无人化乘梯需求,通过梯控与电梯门禁的集成,支持设备自主呼梯、乘梯及楼层切换,并可扩展至闸机、快速门、卷帘门、玻璃门、防火门等多场景门禁控制,适用于智能工厂、物流仓储、商业楼宇等自动化场景。
二、通讯与接口规范
-
推荐通讯方式
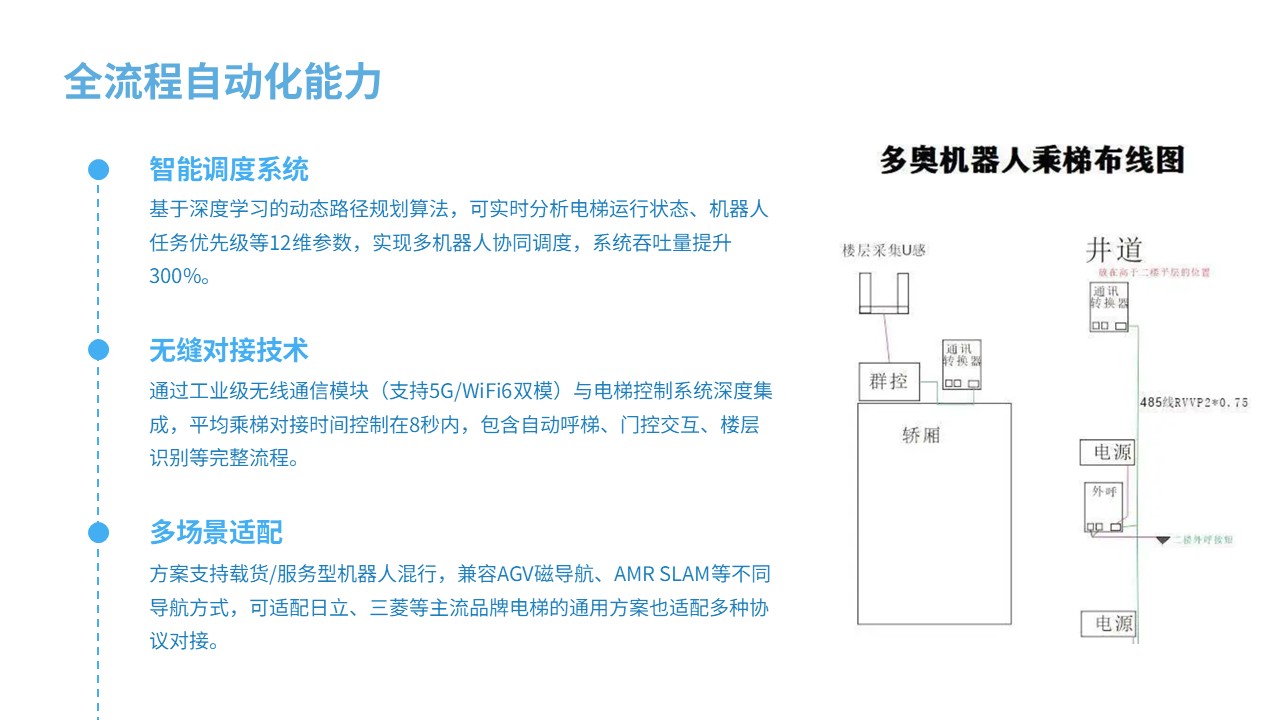
- RS-485:需支持双工通讯及电梯运行状态实时反馈
- 其他协议:MQTT/TCP/HTTP/4G/5G/LORA/Modbus TCP/RTU(需咨询多奥技术支持)
- 不推荐使用422/232等传统接口
-
信号交互要求
- 持续轮询轿厢运行状态
- 呼梯指令需包含实时状态查询机制
三、特殊场景处理
-
电梯门配置
- 单开门默认使用主门
- 贯通门/双开门(主操/副操/残操)需定制方案
-
电源与节能模式
- 梯控取电必须在电梯电源前端
- 需保持电梯无休眠状态,休眠功能不得影响实际使用
-
特殊按键类型
- 触摸屏按键、触摸按键、协议模式、DOP等需专项方案(咨询多奥)
四、乘梯流程示例
4.1所在楼层
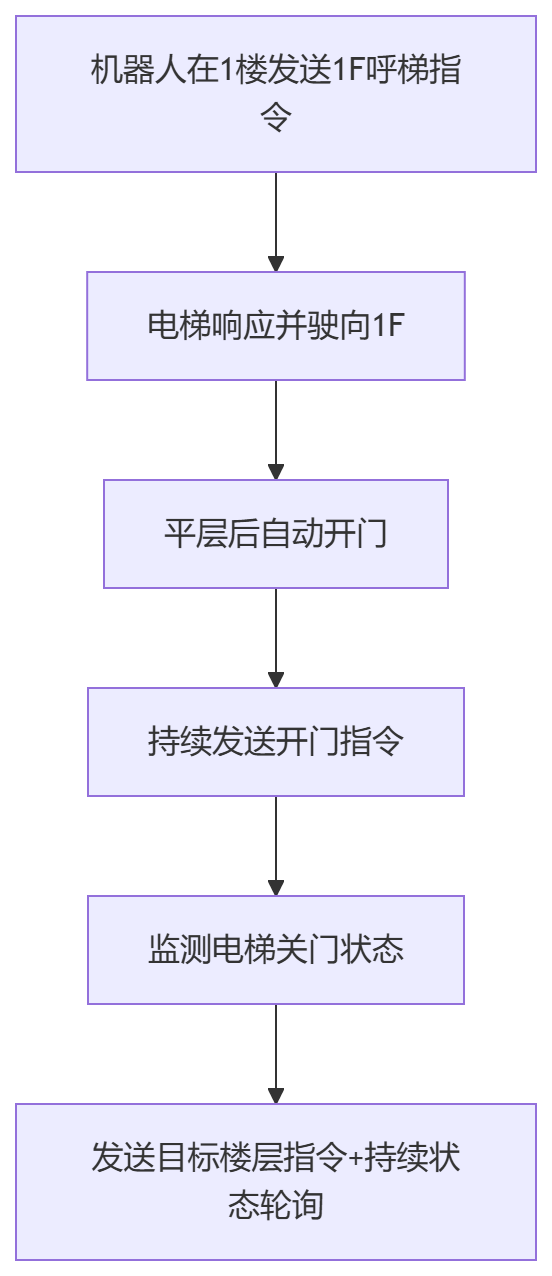
机器人在1楼 → 发送1F呼梯指令 → 梯控触发外呼 → 电梯到达1F开门 → 梯控持续发送开门信号(≥30秒) → 机器人进入轿厢 → 检测到机器人进入 → 梯控停止发送开门信号 → 电梯正常关门(或梯控发送关门指令) → 电梯运行至目标楼层
sequenceDiagram
participant Robot
participant DOA_TK as 多奥梯控
participant Elevator
Robot->>DOA_TK: 发送1楼呼梯指令(外呼A模式)
DOA_TK->>Elevator: 登记指令,持续发送开门保持信号
Elevator-->>DOA_TK: 实时反馈状态(运行中/到达1楼)
Elevator->>Elevator: 平层开门
Robot->>DOA_TK: 循环发送开门指令(确保进入)
Robot->>DOA_TK: 检测关门状态后发送目标楼层(内呼B模式)
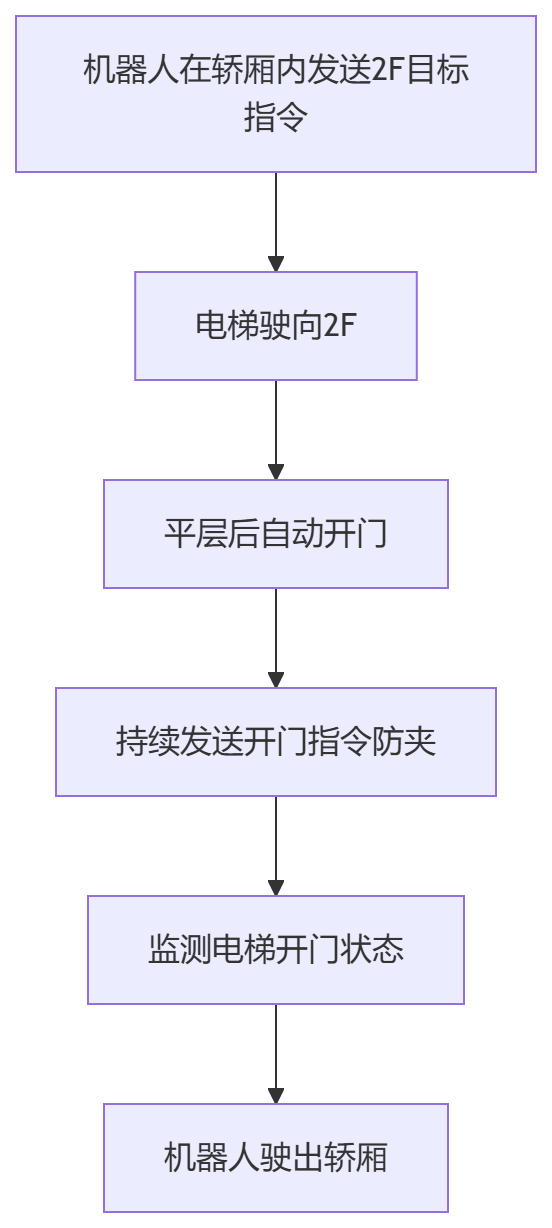
4.2目的楼层
机器人在轿厢内 → 发送目标楼层(如2F)指令 → 梯控触发轿厢内2F按钮 → 电梯运行至2F平层 → 梯控发送开门信号 → 机器人离开 → 检测到机器人离开 → 梯控停止发送开门信号 → 电梯正常运行
sequenceDiagram
participant Robot
participant DOA_TK as 多奥梯控
participant Elevator
Robot->>DOA_TK: 发送2楼指令(内呼B模式)
Elevator-->>DOA_TK: 实时反馈运行状态
Elevator->>Elevator: 到达2楼平层开门
Robot->>DOA_TK: 循环发送开门指令(确保安全离开)
DOA_TK->>Elevator: 维持开门直至机器人离梯
五、扩展功能与咨询建议
- 多场景门禁控制:系统可扩展至闸机、快速门、防火门等设备的联动控制,实现自动化设备跨区域移动的全流程无人化管理。
- 技术咨询:针对呼梯模式差异、特殊电梯协议(如协议模式、DOP)、触摸屏适配等问题,建议联系多奥售前技术团队获取定制化方案。

六、实施要点与注意事项
-
电梯改造要点
- 梯控取电必须在电梯前端,独立于电梯控制系统
- 电梯参数调整:关闭节能休眠、取消防捣蛋功能、延长开门时间
- 确保梯控与电梯系统电气隔离,不影响原有安全性能
-
机器人适配
- 需集成通信模块 (如 RS485 转 USB、Wi-Fi 或 4G 模组)
- 安装位置传感器 (激光雷达 / 红外),精确停靠电梯门口 (误差 < 5cm)
- 开发专用 SDK,实现与梯控系统指令交互
七、总结与下一步
多奥 AGV/AMR/ 机器狗乘梯控制系统通过 **"感知 - 控制 - 通信"** 三层架构,实现了机器人与电梯的无缝协同,可扩展至闸机、各类门控设备,构建完整的智能通行生态。
下一步建议:联系多奥售前技术团队,获取针对您特定场景的详细方案,包括:
- 电梯品牌与型号适配确认
- 通信协议选择建议
- 硬件配置清单与报价
- 现场勘测与实施计划
注:本方案基于多奥最新 V10.8 版本系统,实际实施可能因电梯型号、现场环境略有调整,建议与多奥技术人员确认最终方案。


















 868
868

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











