



 本文探讨了智能驾驶技术的发展现状,重点介绍了东信创智的实车测试解决方案,包括测试场景设计、设备应用、目标类型和场地规划。文章强调了测试在智能驾驶商业化中的重要性,以及实车测试与仿真测试的互补作用。
本文探讨了智能驾驶技术的发展现状,重点介绍了东信创智的实车测试解决方案,包括测试场景设计、设备应用、目标类型和场地规划。文章强调了测试在智能驾驶商业化中的重要性,以及实车测试与仿真测试的互补作用。
一、智能驾驶相关技术发展现状
随着汽车智能技术的蓬勃发展,汽车逐步演变成智能终端。由于智能驾驶对提升通行效率、减少交通事故有着重要意义,因此智能驾驶自然也成为当今汽车产业发展的重要方向之一。近年来上市的车型,基本上都要配置一定的智能驾驶相关功能。目前配备L2级智能驾驶的车型已经大规模量产,少量车型已经具备在特定场景中实现L3级自动驾驶的能力,同时多数主机厂及科技公司都在积极的攻克L4级自动驾驶技术。
众所周知,智能驾驶系统具有“人-车-环境”强相关的特性,但环境的复杂多变性又使得智能驾驶在应用之前需要有大量的测试工作,因此测试与评价成为智驾系统商业化的重要环节。东信创智紧跟智能驾驶技术发展的脚步,也不断在测试验证技术方面取得了一个又一个的突破。
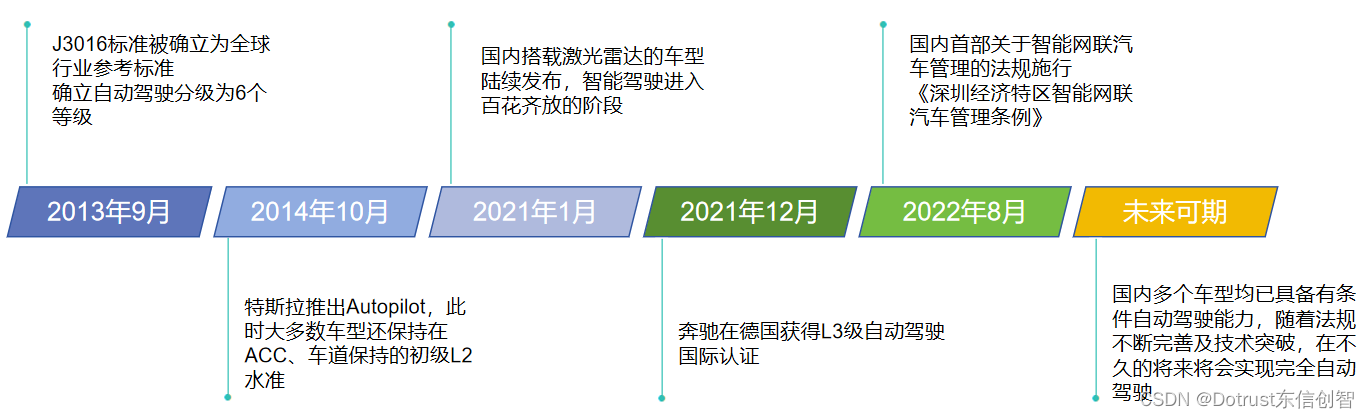
图1 智能驾驶发展历程
二、智能驾驶实车测试解决方案
智能驾驶测试主要分为仿真测试和实车测试两个方向。其中仿真测试是利用虚拟仿真技术,对道路环境、交通、感知等系统进行仿真建模,能够在极限场景以及自定义的多维度工况下进行测试,实现对智能驾驶功能的全方位高效验证。目前仿真测试主要包含DIL/MIL/SIL/HIL/VIL等不同的解决方案,针对仿真测试,我们在之前的文章中已经做过相应的方案介绍,欢迎大家搜索阅读收藏。
相比于仿真测试,实车测试是基于真实道路场景下开展的功能验证,更贴合实际,但由于受到测试效率、极端场景等因素限制,实车测试会有一定的局限性,而实车测试又是开发过程中不可或缺的一环,那么就要尽力的去贴近实际完成测试验证。本文会将理论与实际相结合,从实车测试方向和读者们一起探讨分享东信创智的测试方案。
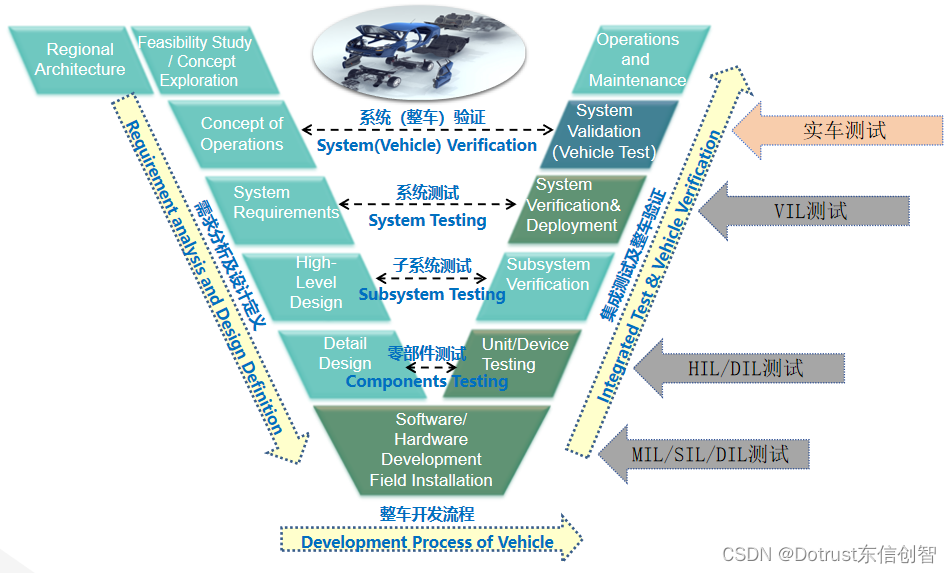
图2 智驾测试在整车开发过程中的应用
实车智驾测试方案的制定可从测试场景、测试设备、测试目标、测试场地四个方面来进行。不同于传统的功能测试,智驾测试核心为测试场景设计,智驾测试的完整性依赖于测试场景的覆盖度。测试设备、测试目标、测试场地将依托于具体的功能或场景进行合理选择。本文将对测试场景设计、测试设备应用、测试目标类型、测试场地规划四个维度对测试方案进行简单介绍。
1、测试场景设计
智能驾驶与车辆动态息息相关,路面上的每个参与者都有可能对其结果产生影响,如何应对复杂多变的道路环境便成为测试时需要考虑的关键因素。测试场景作为智驾测试的基础,设计时需要考虑交通参与者、道路、气候、光照、障碍物、驾驶员行为等因素,同时也需要覆盖法规所涉及的标准测试场景。每个类别下会有细分的原则,如道路条件下会考虑到交通信号灯、多路口交汇等等。将不同的类别加以组合,建立并不断完善智能驾驶测试场景库,在测试矩阵中将场景与功能进行匹配,测试时可直接调用。测试时需考量在规定的场景之内能够有正确的响应,而在规定场景之外能够正常退出并提示接管。
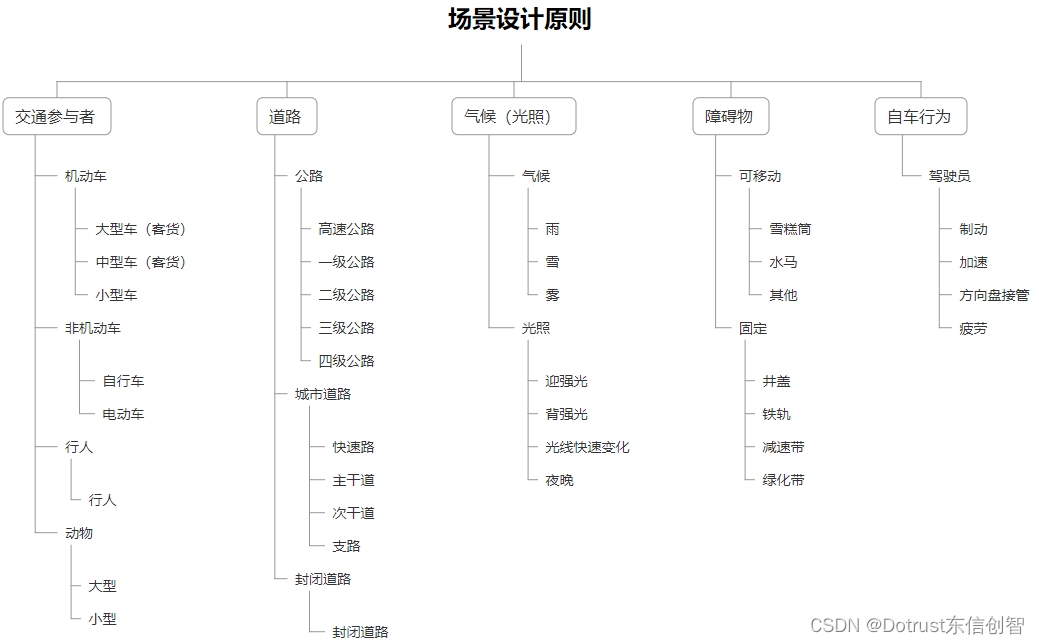
图3 场景设计原则
2.测试设备应用
智能驾驶测试通常需要CANoe、总线数据记录仪、图像及雷达数据记录仪、标定设备及惯导系统等。
CANoe:可以采集智驾域控制器与其他模块间的数据流、进行故障注入测试、对毫米波雷达的数据进行图形化显示等工作,常用的设备有Vector VN1640(CANoe Pro )、Vector VN5650(CANoe Pro + Option Ethernet)。
车载总线记录仪:智驾测试时需要记录总线数据,用于数据分析和问题定位等工作。主流的车载总线分为CAN总线及以太网,本文推荐使用GL5350(支持20路CAN,含4路CAN FD)或GL5370(支持24路CAN,含12路CAN FD)进行CAN总线的数据记录,如进行以太网数据记录,需外加GL5450(支持20路100BASE-T1,6路1000BASE-T1)进行扩展,配合GL5350/5370一起记录。

图4 CANoe及总线记录仪
ADAS数据记录仪:对于雷达、摄像头的数据记录也同样重要,推荐使用VP6000/VP7000高性能ADAS/AD数据记录仪用于视频流、雷达原始数据、XCPonEthernet数据的并行同步记录,该设备适用于大带宽情况下的批量数据采集的应用场景,同时可以通过CANape对多台记录仪的控制实现多传感器数据的同步记录、同步触发。


图5 ADAS数据记录仪
CANape & Option Driver Assistance:CANape可将雷达采集的目标信息同步到摄像头采集的视频图像上,通过与真实环境的比较,进行控制器目标识别算法的验证。此功能可应用于多测试场景下的交通参与者及障碍物的识别等。

图6 CANape界面
RT 3000系统:适用于动态应用的高性能GNSS/INS,通过卫星定位及差分定位,采集车辆动态信息,精确的测量车对车、吃车对车道和车对基础设施的距离,实现厘米级精确定位,可用于进行车道居中功能测试时车辆相对两侧车道的距离,也可用于ACC功能测试时测试车与目标车的相对距离、车速及偏置量等。
3、测试目标类型
实车智驾测试时不可避免的会发生碰撞,为了保证人员安全,避免测试车辆的损坏,测试时通常使用软体目标来代替真实目标物,实车测试所用的目标物设备主要包括软体目标车、假人(包含成年及幼年)、骑车假人,目标物由目标主体及带动目标主体进行移动的动力装置构成,目标物有以下特征:
- 发生碰撞时,应尽量避免车辆及目标物的损伤,目标物应为轻材质或吸能材料;
- 目标应保证视觉、激光雷达和毫米波雷达等车载传感器的识别特性;
- 目标物与真实目标高度、大小相似;
- 目标物有良好的动态性能,可以按照要求的路径和速度运动。
下图是一些常见的测试目标及动力装置的介绍:
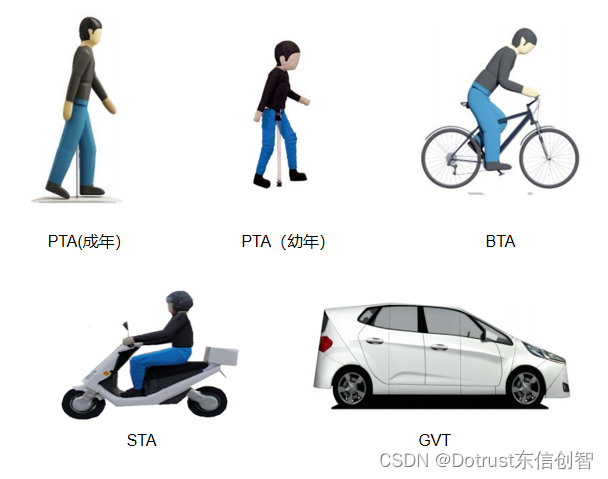
图7 测试目标

图8 动力装置
4、测试场地规划
为安全起见,部分智能驾驶测试需要在非开放道路进行,测试场地的选择通常分为两种,即直道与弯道。测试之前通常需要根据测试场景及功能来计算出所需的场地大小,即所需封闭路段的长度、弯道半径。测试时优先选择封闭道路进行测试,选择封闭道路测试相对灵活,在没有合适的封闭路段时,则需要考虑租用专用的测试场地进行测试。
直道测试场景中,例如AEB功能的测试,计算测试场地大小时需要留有测试开始前的调试距离即加速和调速距离、测试距离、必要的制动距离,并且这些距离会因为车速的不同而发生改变,依据所需的最长距离,合理的选择试验场地。
弯道测试场景中,如ACC弯道情况下的测试,典型的弯道半径分为三种,即125m、250m、500m,如果没有标准弯道场地,那么我们可以依靠车辆来对场地进行大概的测量,原理是车辆在低速行驶时,通过前轮转角和轴距来计算曲率,例如转向比17,轴距2.8m,方向盘转角约21°,计算可得弯道半径约为125m。

图9 汽车测试场
三、结语
随着汽车越来越智能化,无论是自主品牌或是合资品牌,智能驾驶相关功能已经几乎成为标配,东信创智拥有成熟的技术方案及测试团队,本篇文章作为开篇对测试方案进行介绍,后续将结合具体功能进行详细讲解,欢迎持续关注本系列文章。
DOTRUST
VX|dotrustech
联系我们|market@dotrustech.com


















 543
543

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









