






 本文介绍了OpenCV中cv::solvePnP函数,用于解决透视-点(PnP)问题,计算物体在相机坐标系中的姿态。还说明了其参数含义及返回值,可实现物体定位和跟踪。同时介绍了cv2.calibrateCamera()函数,用于相机标定,能求解相机内参和外参,返回相关参数用于图像畸变矫正。
本文介绍了OpenCV中cv::solvePnP函数,用于解决透视-点(PnP)问题,计算物体在相机坐标系中的姿态。还说明了其参数含义及返回值,可实现物体定位和跟踪。同时介绍了cv2.calibrateCamera()函数,用于相机标定,能求解相机内参和外参,返回相关参数用于图像畸变矫正。
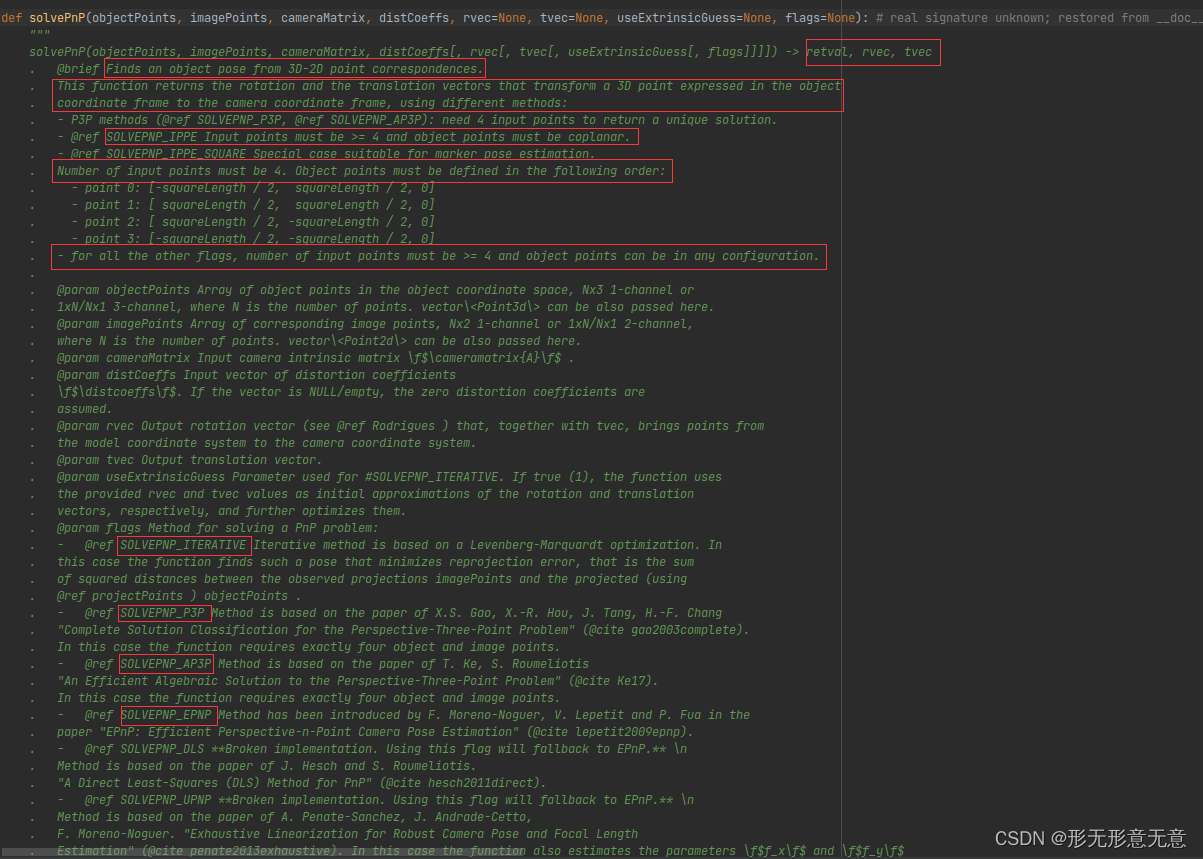
cv::solvePnP函数是OpenCV中的一个函数,用于解决透视-点(PnP)问题,即根据物体的3D模型和对应的2D图像点来估计物体在场景中的姿态。该函数的作用是计算物体在相机坐标系中的姿态,即旋转和平移向量。
cv::solvePnP函数的参数含义如下:
- objectPoints: 物体的3D模型点,即物体的空间坐标点。
- imagePoints: 对应的2D图像点,即物体在图像上的投影点。
- cameraMatrix: 相机的内参数矩阵,包括焦距、主点等参数。
- distCoeffs: 相机的畸变系数,用于校正图像畸变。
- rvec: 初始的旋转向量的估计值,可选参数。
- tvec: 初始的平移向量的估计值,可选参数。
- useExtrinsicGuess: 是否使用初始估计值,默认为false。
- flags: 解PnP问题时使用的算法标志,例如EPnP、DLT等。cv::solvePnP函数会返回计算得到的物体在相机坐标系中的旋转向量和平移向量。通过这些向量,可以得到物体的姿态信息,从而实现物体在场景中的定位和跟踪。
【注:以上信息由chatgpt生成】
PnP的含义为 Project n Points,通过车辆坐标系或世界坐标系的坐标点和图像上的坐标点,来拟合出到相机系的旋转向量和平移向量,用于计算相机外参;
cv::Mat rotation_vector, translation_vector;
//若在鱼眼图上进行求解
cv::solvePnP(worldPoints, imagePoints, cameraInstrinsic, cameraDistCoeffs, rotation_vector, translation_vector);
// 若在无畸变图像上进行拟合求解,则畸变参数可传递一个空矩阵,求解出旋转向量和平移向量,通过rotation_vector和translation_vector返回
cv::solvePnP(worldPoints, imagePoints, cameraInstrinsic, cv::Mat(), rotation_vector, translation_vector);
在python中的写法为:
# 在无畸变图中求解外参,若在畸变图上,则需传入畸变系数
_, rotation_vector, trans_vector = cv2.solvePnP(world_points, image_points, camera_instrinsic, None)
cv.solvePnP一般是在已知相机内参的情况下,用来求解相机外参;而cv.calibrateCamera()则可以通过棋盘格等同时求解出相机的内参和外参;
cv2.calibrateCamera()函数的作用是对相机进行标定,通过找到相机的内参和外参参数。这个函数会使用一组标定图像(如棋盘格图案)来确定相机的内部参数和畸变系数,以及相机的旋转和平移向量。
参数含义如下:
- objectPoints: 一个包含标定图案上的三维点坐标的列表,通常是在标定图案上预定义的。
- imagePoints: 一个包含标定图案在图像上对应的二维点坐标的列表。
- imageSize: 图像的尺寸,通常是一个元组,如(640, 480)。
- cameraMatrix: 输出的相机矩阵,包含相机的内部参数。
- distCoeffs: 输出的畸变系数,用来校正图像畸变。
- rvecs: 输出的旋转向量。
- tvecs: 输出的平移向量。
- flags: 用来指定标定相机时的一些选项,如是否考虑初始猜测值等。这个函数会返回相机矩阵、畸变系数、旋转向量、平移向量等参数,这些参数可以用来对标定后的相机拍摄的图像进行畸变矫正。
【注:该释义由chatgpt生成】

















 7078
7078





 到【灌水乐园】发言
到【灌水乐园】发言







