



了解CMMI项目管理过程-项目计划(PP),使用知识域*过程矩阵,对比项目规划过程组与CMMI-PP过程
CMMI-PP过程
| 特定目标 | 特定实现 |
|---|---|
| SG1:建立估计:要建立和维护项目计划参数的估计数据 | SP1.1估计项目的范围,SP1.2建立项目属性的估计,SP1.3定义项目生命周期,SP1.4确定工作量和成本的估计 |
| SG2:开发项目计划:要建立和维护项目计划,并作为管理项目的基础 | SP2.1建立预算和进度,SP2.2标识项目风险,SP2.3计划数据的管理,SP2.4计划项目的资源,SP2.5计划所需的知识和技能,SP2.6计划项目相关人员的参与,SP2.7建立项目计划 |
| SG3:获得对计划的承诺:要建立和维护对项目计划的承诺 | SP3.1评审影响项目的计划,SP3.2协调工作和资源,SP3.3获得计划的承诺 |
| 知识领域 | 项目规划过程组 | SG1建立估计:要建立和维护项目计划参数的估计数据 | SG2开发项目计划:要建立和维护项目计划,并为管理项目的基础 | SG3获得对计划的承诺:建立和维护对项目计的承诺 |
|---|---|---|---|---|
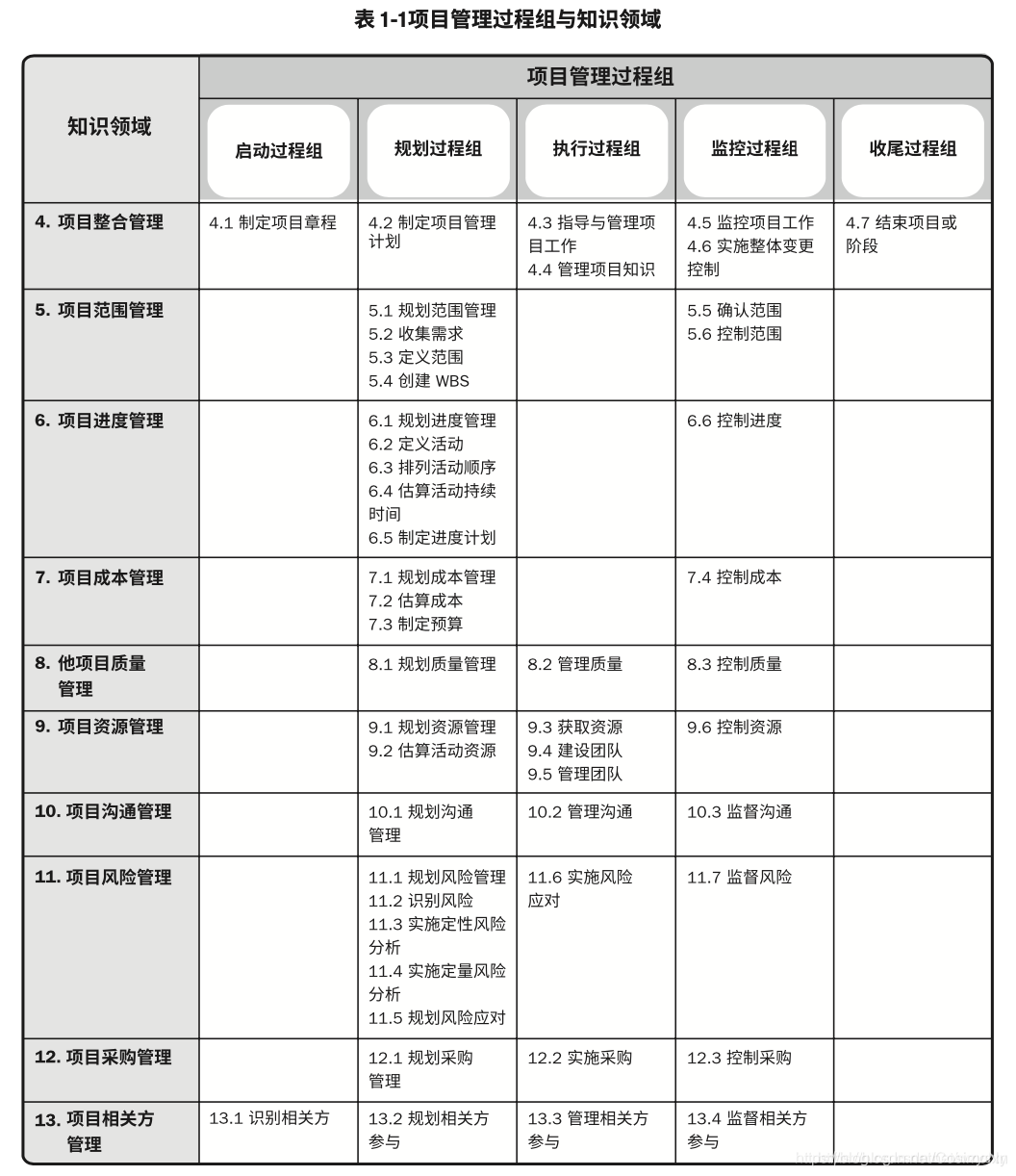
| 项目整合管理 | 制定项目章程、制定项目管理计划、指导与管理项目工作、管理项目知识、监控项目工作、实施整体变更控制、结束项目或阶段 | |||
| 项目范围管理 | 规划范围管理、收集需求、定义范围、创建WBS、确认范围、控制范围 | 估计项目的范围、建立项目属性的估计 | 建立项目计划 | |
| 项目进度管理 | 规划进度管理、定义活动、排列活动顺序、估算活动持续时间、制定进度计划 、控制进度 | 定义项目生命周期 | 建立进度 | |
| 项目成本管理 | 规划成本管理、估算成本、制定预算、控制成本 | 确定工作量和成本的估计 | 建立预算 | |
| 项目质量管理 | 规划质量管理、管理质量、控制质量 | |||
| 项目资源管理 | 规划资源管理、估算活动资源、获取资源、建设团队、管理团队、控制资源 | 计划数据的管理、计划项目的资源 | 协调工作和资源 | |
| 项目沟通管理 | 规划沟通管理、管理沟通、监督沟通 | 计划所需的知识和技能 | ||
| 项目风险管理 | 规划风险管理、识别风险、实施定性风险分析、实施定量风险分析、规划风险应对、实施风险应对、监督风险 | 标识项目风险 | 评审影响项目的计划 | |
| 项目采购管理 | 规划采购管理 、实施采购、控制采购 | |||
| 项目相关方管理 | 识别相关方、规划相关方参与、管理相关方参与、监督相关方参与 | 计划项目相关人员的参与 | ||
| 其他知识 | 获得计划的承诺 |
阅读JWD案例的前期准备任务,结合创新项目实践,构建软件项目
创新竞赛项目准备过程(组),该过程(组)目标交付物为 Business Case 。
答:
决定项目范围、时间、成本约束
识别项目发起人
开发项目业务场景(business cases)
开会讨论项目管理过程
确定项目是否分为多个子项目
了解业务场景,提供技术方案。给出大致的时间与开发成本
内部系统稳定后再考虑用微信小程序让客户直接访问系统
Business Case 文档

















 1199
1199

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









