



 【导读】
【导读】
在无人机视觉领域,算法的鲁棒性需在动态视角、尺度变化、复杂背景的严苛环境下验证。UAVDT 与 VisDrone 作为全球公认的无人机视角双雄,以其大规模、多维度、高复杂度的特性,成为驱动目标检测与跟踪技术突破的核心引擎。>>更多资讯可加入CV技术群获取了解哦~
目录
一、无人机焦点数据集
-
UAVDT:无人机车辆跟踪

定位: 专为无人机俯拍车辆设计的检测(DET)与多目标跟踪(MOT)基准。
规模保障: 80,000+帧高清图像(1080×540),覆盖海量交通场景。
三维挑战:
-
天气变化: 晴/阴/云影下的光照差异,考验模型环境适应性。
-
飞行高度: 高度变化导致车辆尺度剧烈波动(近处占屏30% → 远处<50像素)。
-
视角动态: 无人机平移、旋转、俯冲带来目标形变、遮挡、运动模糊。
场景覆盖: 高速公路、城市道路、交叉路口,含稀疏与拥堵极端状态。
核心挑战:
-
跨尺度目标检测(尤其微小车辆)
-
动态视角下的轨迹稳定性(ID切换率优化)
-
复杂光影与背景干扰(如树影遮挡、反光路面)
应用: 智慧交通流量监控、无人机物流巡查、应急车道占用检测。
-
VisDrone:无人机全能数据集

定位: 多任务综合型数据集(检测/跟踪/计数),定义无人机视觉天花板。
超大规模: 10,209+静态图像 + 视频序列,260万+标注目标。
极致多样性:
空间: 中国14个城市,跨越城乡、广场、公园、高速等多场景。
环境: 晴天/阴天/雾霾/黄昏全时段覆盖。
目标: 行人、轿车、巴士、卡车、三轮车、自行车等10+类别。
标注深度: 边界框 + 类别 + 遮挡等级 + 跟踪ID + 截断状态。

核心挑战:
-
密集微小目标检测: 低空航拍下50%目标小于32×32像素。
-
复杂背景干扰: 建筑群阴影、树木遮挡、地面纹理干扰。
-
长尾分布: 行人/轿车占比超70%,三轮车等稀有类别样本少。
-
跨场景泛化: 城乡场景差异、天气突变下的模型稳定性。
应用: 智慧城市管理、人群聚集预警、交通态势分析、边境巡检。
数据集获取方式:
点击链接访问:www.coovally.com,添加官方客服小助手。发送数据集名称即可获取!
二、垂直场景:无人机数据的实战应用精选
-
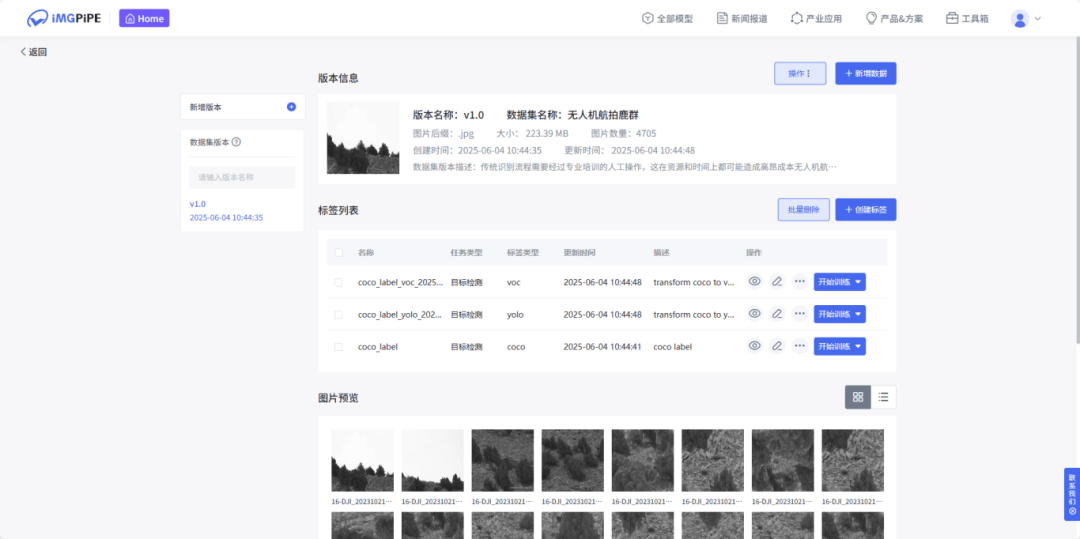
生态监测:无人机野生动物识别数据集
-
特点: 4700+张野外航拍图像,多物种、长尾分布的生态监测基准
-
挑战: 植被遮挡、光影斑驳、形态仿射变换。
-
应用: 野生动物种群普查、栖息地保护评估。
-
生命救援:SARD搜救数据集

特点: 1981帧图像标注6类人体姿态(站/走/跑/坐/躺/模糊)。
创新点: 特别标注“躺卧”目标为潜在伤员。
挑战: 高草丛/碎石滩/森林边缘的复杂地形干扰。
应用: 灾害现场人员定位、山区失踪人员搜索。
-
无人机航拍垃圾检测数据集

特点: 复杂城市/自然场景下的垃圾目标识别基准。
挑战: 道植被掩埋的塑料垃圾(占样本35%),远处垃圾点平均像素<40×40
应用: 城市街道/河道漂浮物/森林隐蔽垃圾/沙滩废弃物
三、Coovally平台训练实测
以上所有无人机数据集已经在Coovally平台集成。

除此之外,Coovally平台汇聚国内外开源社区超1000+热门模型,覆盖YOLO系列、Transformer、ResNet等主流视觉算法。同时集成300+公开数据集,涵盖图像分类、目标检测、语义分割等场景,一键下载即可投入训练,彻底告别“找模型、配环境、改代码”的繁琐流程!
-
从实验到落地,全程高速零代码!
无论是学术研究还是工业级应用,Coovally均提供云端一体化服务:
-
免环境配置:直接调用预置框架(PyTorch、TensorFlow等);
-
免复杂参数调整:内置自动化训练流程,小白也能轻松上手;
-
高性能算力支持:分布式训练加速,快速产出可用模型;
-
无缝部署:训练完成的模型可直接导出,或通过API接入业务系统。
!!点击下方链接,立即体验Coovally!!
平台链接:https://www.coovally.com
无论你是算法新手还是资深工程师,Coovally以极简操作与强大生态,助你跳过技术鸿沟,专注创新与落地。访问官网,开启你的零代码AI开发之旅!
结语
UAVDT与VisDrone构建了无人机视觉的评估基石,而野生动物监测、生命搜救等场景化数据集则让技术精准落地。在 Coovally 的赋能下,研究者可跨越数据与工程鸿沟,直击小目标检测、动态视角跟踪、跨域泛化等核心问题,推动无人机从“看见”走向“认知”,重新定义天空的智能边界。
未来我们还将持续分享更多优质数据集与开源工具,关注我,一起拓展AI的边界,让视觉真正服务现实世界。



















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









