




目录
一、点云数据概览
点云数据为激光雷达扫描设备获取的实时场景数据,其具有快速高效、准确、方便使用等特点。一般为后缀为.las、.txt、.npy,其中las为标准的点云数据文件,txt为转换为文本文件后方便阅读查阅的形式,npy为便于python中numpy库处理的文件形式。我们可以将后缀为las或txt的文件用CloudCompare软件将其打开并查看可视化的点云数据,也可以在软件中实现文件类型的转换。点此下载CloudCompare

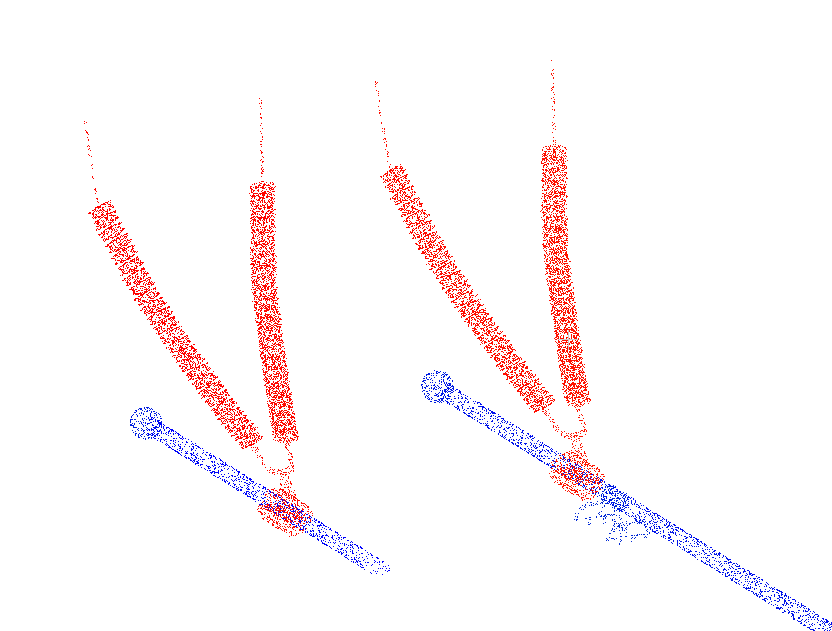
如下图1.1是一副点云数据可视化图,使用CloudCompare打开。
我们将las文件转换为txt类型文件后,可以直接使用“记事本”打开阅读(文件过大可能无法打开),如下图所示:
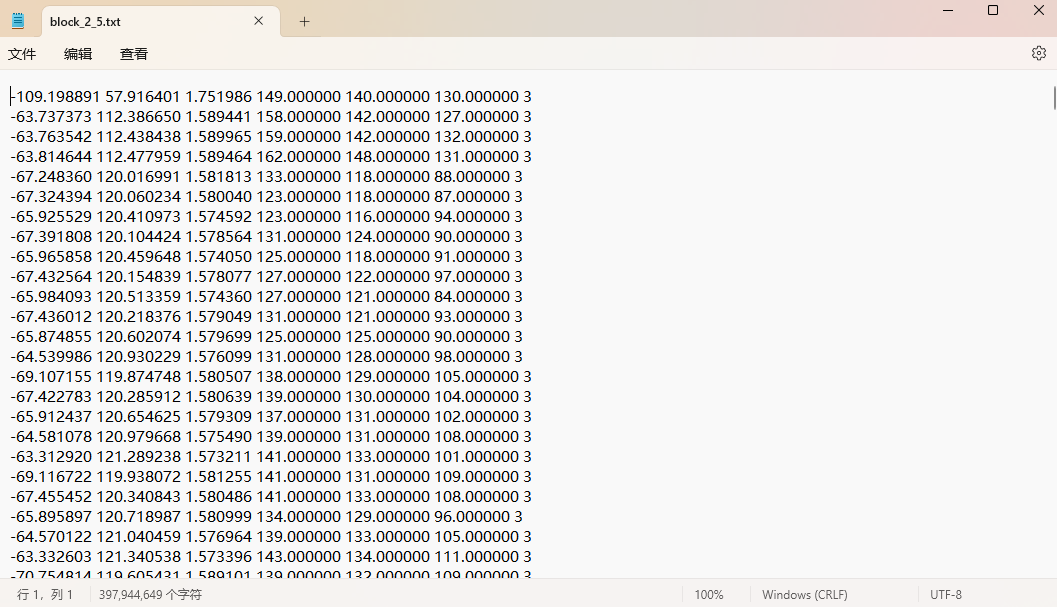
其中前三列数据分别为点云中每一个点在其坐标系下的三维坐标X Y Z,其后的三列数据为每个点记录的RGB三通道色彩值(0~255),最后一个为语义标签。
一般的,点云数据记录了每个点的XYZ坐标(一定有),以及RGB色彩、法向量方向、反射率、强度、语义标签、实例标签等等(可能没有)。
二、点云数据特点分析
点云数据处理的难点在于其不规则性、非结构性、无序性、噪声影响大,没有二维图像与生俱来的结构信息和邻域信息,导致其数据输入与处理成为点云任务的一大难点。
不规则性:点云稀疏程度不一,疏密差异大。

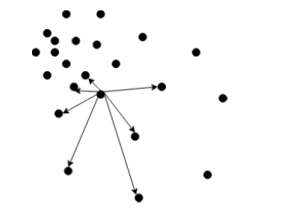
非结构性:点云数据不像二维图像数据那样拥有规则的结构,每一个像素点可以使用一个(x,y)点对来表示其位置,点云中的点无网格结构,每一个点都是独立的。
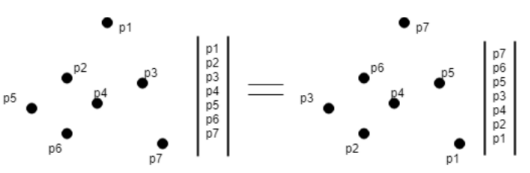
无序性:由于点云没有固定结构,保存点云数据或输入点云数据时无法按照一种不变的顺序进行,将点云数据任意打乱依然表示原点云数据,这将为点云处理任务带来很多难题。
三、点云处理任务
点云处理任务一般包括:点云配准、点云滤波、点云补全、点云分割(语义分割、实例分割)、点云分类、点云部件分类。
点云配准:将两幅具有不同坐标系统的部分重叠点云进行空间对齐,使对应点之间的欧式距离最小化,包括刚体配准(只有平移、旋转变换)和非刚体配准(除了平移、旋转变换,还有尺度因子),处理方法有迭代法、特征法、基于深度学习的方法。
点云滤波:高通滤波、低通滤波、下采样滤波等。
点云补全:获取的点云数据由于扫描过程中的遮挡而导致数据缺失,使用一些方法将缺失的点云数据补齐的过程。
点云语义分割:使用基于深度学习算法的网络, 将具有相同语义类别的点云归为同一类别,并输出其语义标签,比如房屋、路面、树木等。
点云实例分割:在点云语义分割的基础上,将同一语义类别的物体中的每一个个体标注上独立的实例标签,比如房屋中每一栋都打上单独的标签。
点云分类:使用基于深度学习算法的网络,将点云中每一个个体识别为对应的类别,并框出对应物体。
点云部件分类:在点云分类的基础上,将一个个体中的每一个部件单独识别出来并框出,比如飞机的机翼、机舱、尾翼等。



















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









