




使用数据:控制点物方空间坐标、控制点像平面量测坐标
误差方程式:共线条件方程
误差方程观测值:像点量测坐标
误差方程未知数(改正值),本文我使用最全面的改正方程:外方位元素、内方位元素、畸变系数(可根据需求减少未知数,删除未知数改正值和对应的系数即可)
程序流程:打开控制点物方坐标文件、控制点像点坐标文件读取数据,并根据合适的控制点,按照共线条件方程的空间后方交会误差方程形式,将像点坐标观测值作为观测值,将外方位元素改正值、内方位元素改正值、畸变系数改正值作为未知数,并设定合适的起算数据进行迭代解算。计算相片的内外方位元素和畸变系数(k1,k2,p1,p2)。并计算统计精度,保证中误差和残差在一定限度内。
统计计算精度:单位权中误差、未知数中误差、像点观测值残差。
一、单片空间后方交会原理
使用控制点物方坐标文件、控制点像点量测坐标文件,读入数据并保存在二维点、三维点数据结构中。然后将对应点的像平面坐标和物方坐标连接,保存成一条数据,便于后续使用。根据共线条件方程误差方程的空间后方交会形式,将像点量测值作为观测值,将内外方位元素、畸变系数(k1,k2,p1,p2)的改正值作为未知数,设定一个未知数的起算估计值进行迭代,求解最终的相片内外方位元素和畸变系数(k1,k2,p1,p2)。
1.1误差方程构建
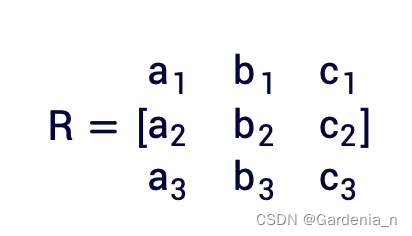
定义旋转矩阵为:
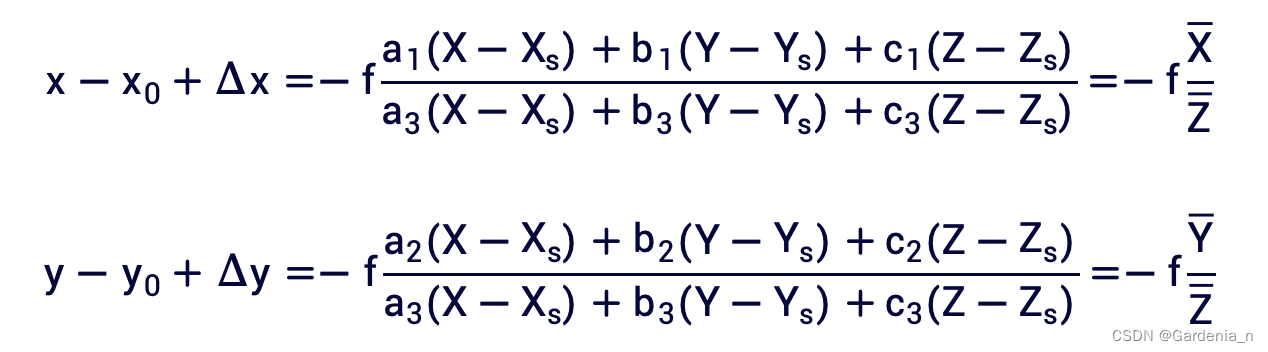
基于共线条件方程:
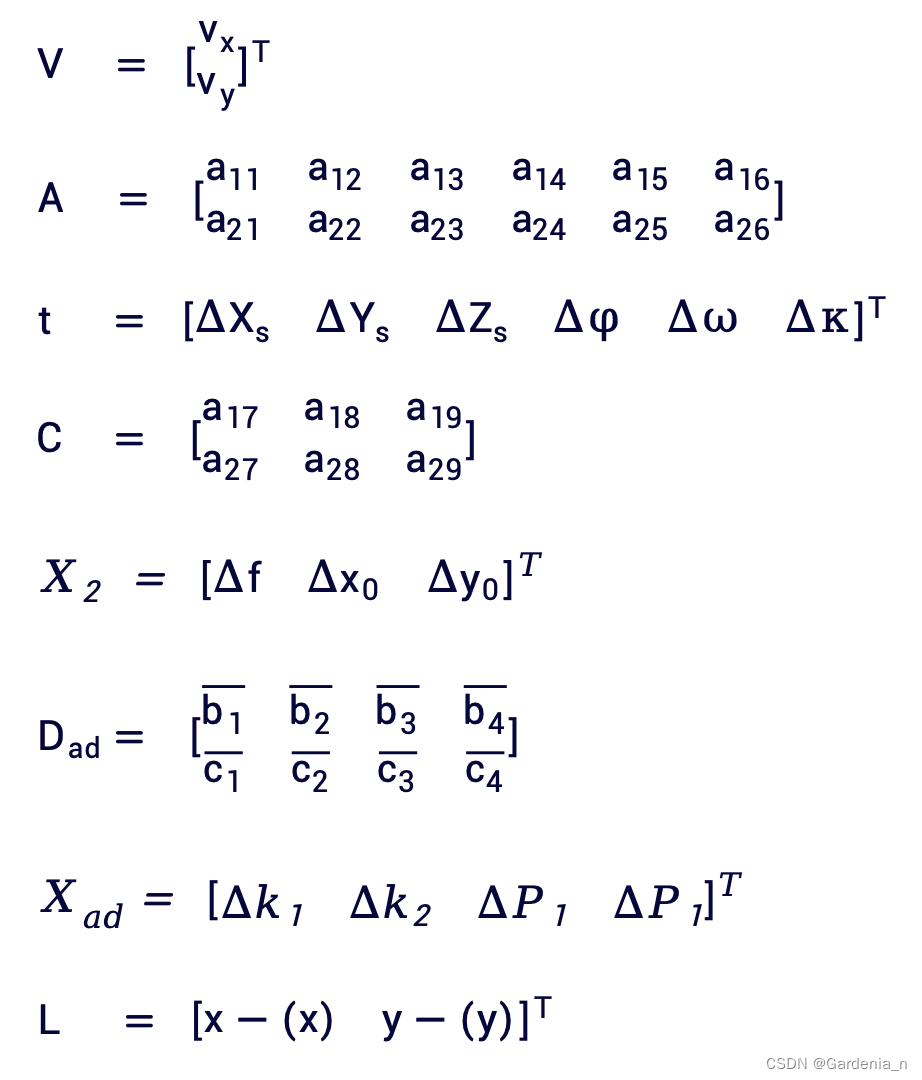
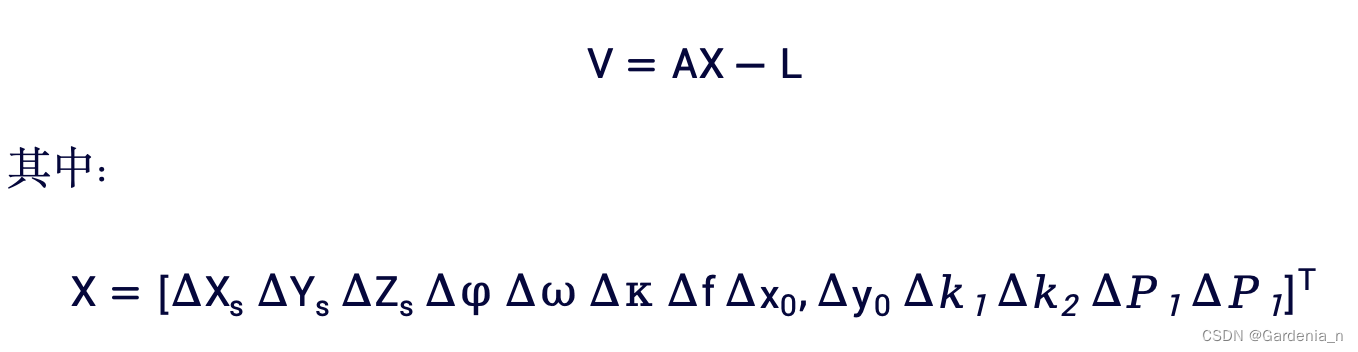
线性化后得到误差方程的一般形式,其中未知数为:

误差方程一般式为:
![]()
(其中At为外方位元素、BcXc为控制点、BuXu为待定点、DadXad为畸变系数的系数及改正值,L为观测值误差项)
而后方交会的误差方程式将内外方位元素和畸变系数作为未知数:

1.2误差方程系数填充
其中:
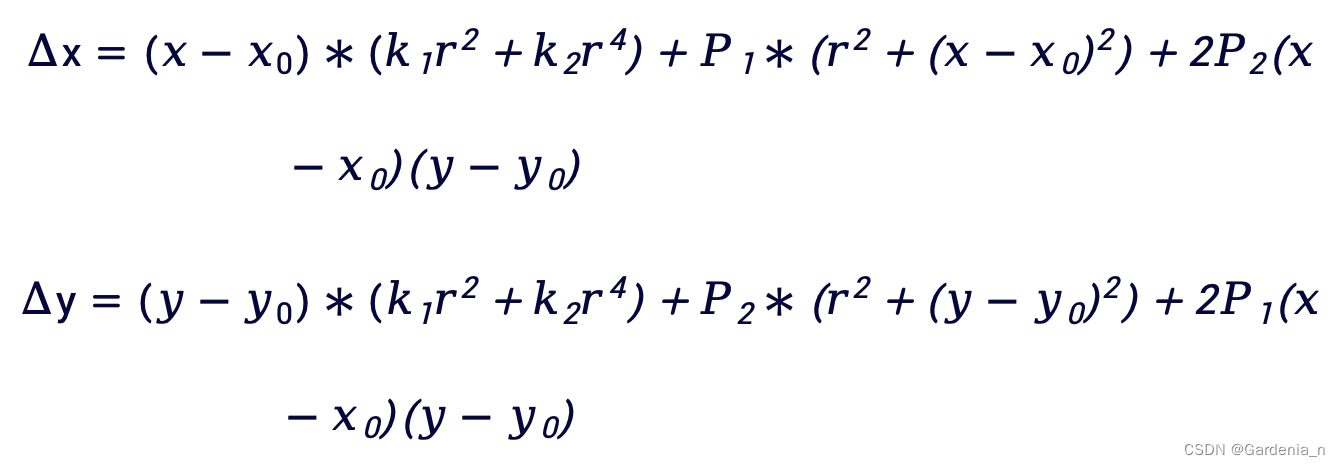
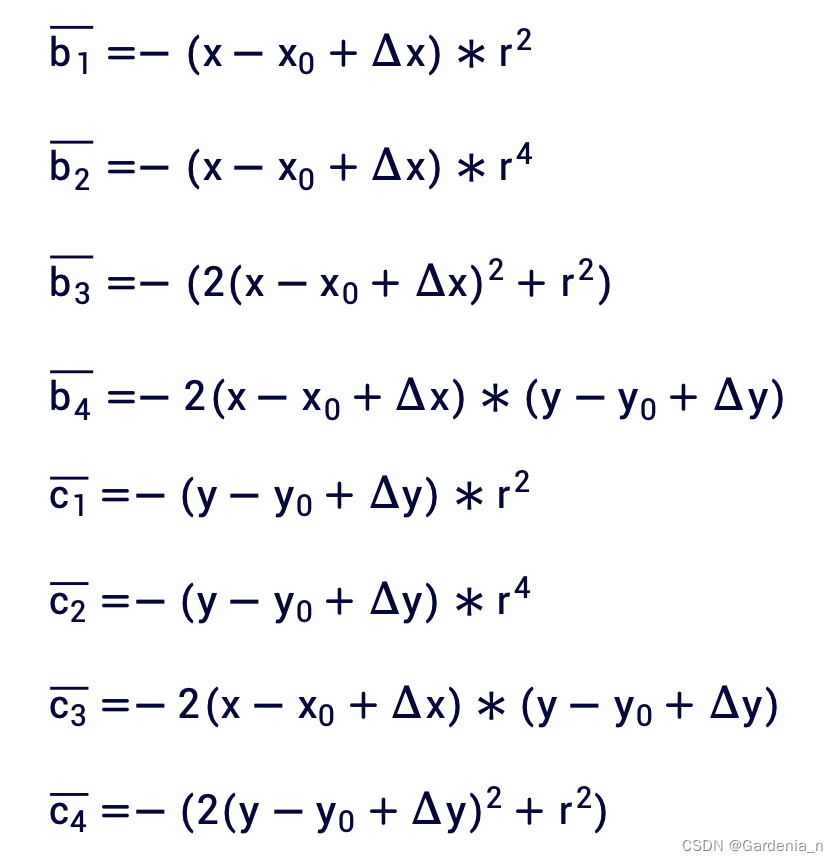
畸变模型选用:

各系数的定义如下:

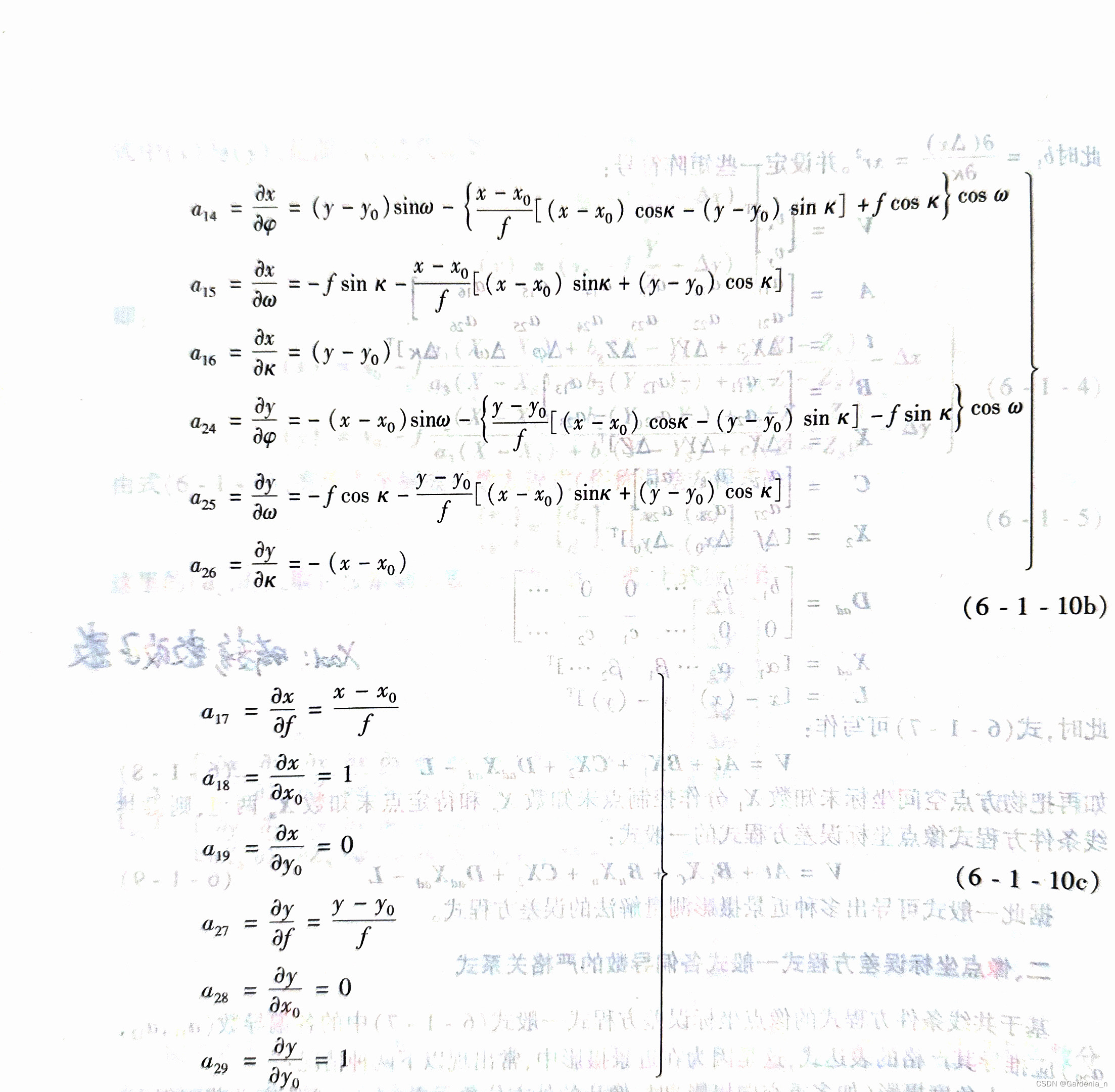
Dad即使用畸变模型对应未知数改正值前的系数即可。
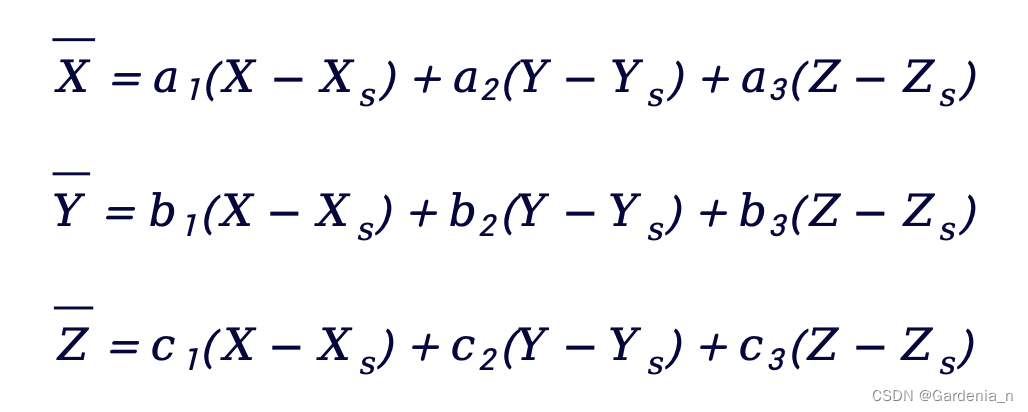
系数求解中使用到的为像空间坐标系下的物方点坐标,故首先需要将控制点的物方坐标从物方坐标系转换到像空间坐标系S-xyz下:
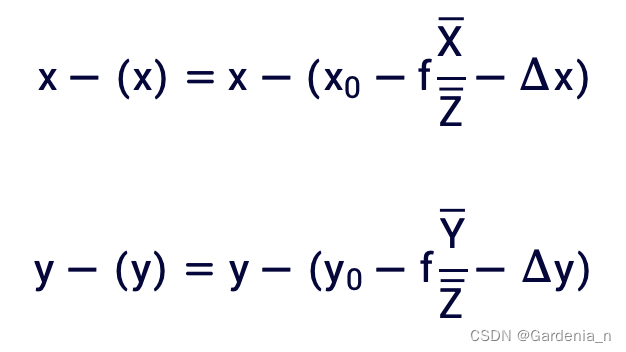
观测值误差项,与
使用畸变模型求解:
1.3初始值(起算值)设置
1.4逐点计算,合并系数矩阵
将所有的像点都计算得到一个误差方程,计算每一个像点对应的误差方程未知数系数和误差项,并将所有的系数阵放在一起求解,系数合并为大系数阵A,大小为(2*num_of_points)*13(13为未知数/改正数的个数,结合实际求解未知数设置),观测值误差阵合并为L,L矩阵大小为(2*num_of_points)*1。
1.5迭代计算求最优解
最后利用最小二乘平差原理,计算未知数改正值:
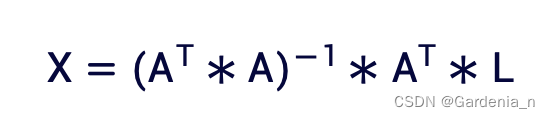
将所有的未知数加上计算得到的改正数,得到新的值,再次代回第一步迭代计算,直到每一项的改正值小于某一个阈值为止(我设置的是0.0001)。输出最后得到的未知数平差计算结果。
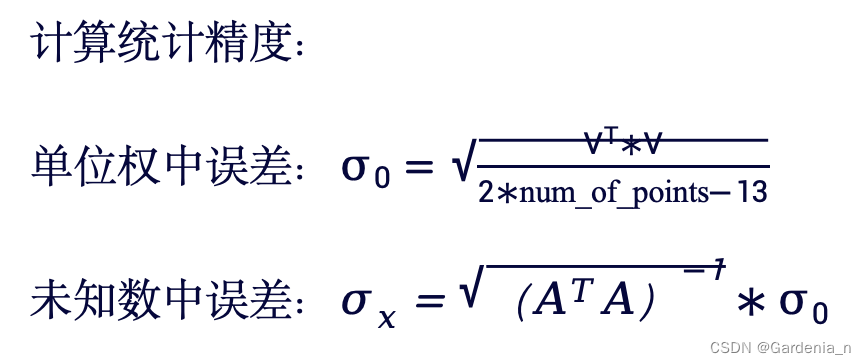
1.6精度统计
二、单片空间后方交会代码
#include <opencv2/highgui.hpp>
#include <opencv2/core.hpp>
//#include <iostream>
#include <math.h>
#include<fstream>
#include<sstream>
#include<vector>
#include<iostream>
#include<iomanip>
using namespace std;
using namespace cv;
// 控制场平面坐标系
// ^ X
// |
// |
// |——————> Y(左手系和右手系的转换)
#define Pi 3.14159265
#define ROWS 4160
#define COLS 6240
#define PIXSIZE 0.00376
//--------------------------结构体申明--------------------------------------
struct ControlPoint
{
int flag;
double X;
double Y;
double Z;
};
struct imgPoint
{
int flag;
double x;
double y;
};
struct merge_point
{
int flag;
double X;
double Y;
double Z;
double x;
double y;
};
//方位元素和畸变系数
struct orienParam {
//内方位元素
double x0 = 0;
double y0 = 0;
double f = 0;
//畸变系数
double k1 = 0;
double k2 = 0;
double p1 = 0;
double p2 = 0;
//外方位元素
double Phi = 0;
double Omega = 0;
double Kappa = 0;
double Xs = 0;
double Ys = 0;
double Zs = 0;
};
//------------------坐标文件读取与坐标系变换---------------------
// 标志点量测坐标定义 标志点像平面坐标定义
// --------> x(pixel) ^ y(mm) -(y-COLS/2)
// | |
// | |
// | -----------------> x (x-ROWS/2)
// | |
// y |
//
void Pixel2Img_with_co_change(vector<imgPoint>& imgPoints)
{
for (int i = 0; i < imgPoints.size(); i++)
{
imgPoints[i].x = (imgPoints[i].x - COLS / 2) * PIXSIZE;
imgPoints[i].y = -1.0 * (imgPoints[i].y - ROWS / 2) * PIXSIZE;
}
}
void readctrl_ptData(char* file, vector<ControlPoint>& ControlPoints)
{
ifstream inFile(file);
if (!inFile)
{
cout << "文件读取失败,请检查文件路径" << endl;
return;
}
string line;
string firstLine;
getline(inFile, firstLine);
while (getline(inFile, line)) {
ControlPoint ctrl_pt;
istringstream iss(line);
iss >> ctrl_pt.flag;
//坐标系转换
iss >> ctrl_pt.Z;
iss >> ctrl_pt.X;
iss >> ctrl_pt.Y;
ctrl_pt.Z = -1.0 * ctrl_pt.Z;
/* Z Y
| X |
| / => |______>X
|/ /
————————>Y /Z */
ControlPoints.push_back(ctrl_pt);
}
inFile.close();
}
void readImgData(char* file, vector<imgPoint>& imgPoints)
{
ifstream inFile(file);
if (!inFile)
{
cout << "文件读取失败,请检查文件路径" << endl;
return;
}
string line;
while (getline(inFile, line)) {
imgPoint img_pt;
istringstream iss(line);
iss >> img_pt.flag;
iss >> img_pt.x;
iss >> img_pt.y;
imgPoints.push_back(img_pt);
}
inFile.close();
}
void Merge_Point(vector<imgPoint>& imgPoints, vector<ControlPoint>& ControlPoints, vector<merge_point>& merge_points)
{
merge_point pair;
for (int i = 0; i < imgPoints.size(); i++)
{
for (int j = 0; j < ControlPoints.size(); j++)
{
if (imgPoints[i].flag == ControlPoints[j].flag)
{
pair.flag = imgPoints[i].flag;
pair.X = ControlPoints[j].X;
pair.Y = ControlPoints[j].Y;
pair.Z = ControlPoints[j].Z;
pair.x = imgPoints[i].x;
pair.y = imgPoints[i].y;
merge_points.push_back(pair);
break;
}
}
}
}
//-----------------误差方程建立------------------------
void cal_Coefficient(Mat& A, Mat& l, vector<merge_point>& merge_points, orienParam& orien)
{
double x0 = orien.x0;
double y0 = orien.y0;
double f = orien.f;
double k1 = orien.k1;
double k2 = orien.k2;
double p1 = orien.p1;
double p2 = orien.p2;
double Phi = orien.Phi;
double Omega = orien.Omega;
double Kappa = orien.Kappa;
double Xs = orien.Xs;
double Ys = orien.Ys;
double Zs = orien.Zs;
//计算旋转矩阵
Mat R = Mat::zeros(3, 3, CV_64FC1);
R.at<double>(0, 0) = cos(Phi) * cos(Kappa) - sin(Phi) * sin(Omega) * sin(Kappa);
R.at<double>(0, 1) = -1.0 * cos(Phi) * sin(Kappa) - sin(Phi) * sin(Omega) * cos(Kappa);
R.at<double>(0, 2) = -1.0 * sin(Phi) * cos(Omega);
R.at<double>(1, 0) = cos(Omega) * sin(Kappa);
R.at<double>(1, 1) = cos(Omega) * cos(Kappa);
R.at<double>(1, 2) = -1.0 * sin(Omega);
R.at<double>(2, 0) = sin(Phi) * cos(Kappa) + cos(Phi) * sin(Omega) * sin(Kappa);
R.at<double>(2, 1) = -1.0 * sin(Phi) * sin(Kappa) + cos(Phi) * sin(Omega) * cos(Kappa);
R.at<double>(2, 2) = cos(Phi) * cos(Omega);
for (int i = 0; i < merge_points.size(); i++)
{
double X = merge_points[i].X;
double Y = merge_points[i].Y;
double Z = merge_points[i].Z;
double x = merge_points[i].x;
double y = merge_points[i].y;
double r_2 = pow(x - x0, 2) + pow(y - y0, 2);
double delta_x = (x - x0) * (k1 * r_2 + k2 * r_2 * r_2) + p1 * (r_2 + pow((x - x0), 2)) + 2 * p2 * (x - x0) * (y - y0);
double delta_y = (y - y0) * (k1 * r_2 + k2 * r_2 * r_2) + p2 * (r_2 + pow((y - y0), 2)) + 2 * p1 * (x - x0) * (y - y0);
double Xbar = R.at<double>(0, 0) * (X - Xs) + R.at<double>(1, 0) * (Y - Ys) + R.at<double>(2, 0) * (Z - Zs);
double Ybar = R.at<double>(0, 1) * (X - Xs) + R.at<double>(1, 1) * (Y - Ys) + R.at<double>(2, 1) * (Z - Zs);
double Zbar = R.at<double>(0, 2) * (X - Xs) + R.at<double>(1, 2) * (Y - Ys) + R.at<double>(2, 2) * (Z - Zs);
//外方位元素系数->线元素
double a11 = (R.at<double>(0, 0) * f + R.at<double>(0, 2) * (x - x0 + delta_x)) / Zbar;
double a12 = (R.at<double>(1, 0) * f + R.at<double>(1, 2) * (x - x0 + delta_x)) / Zbar;
double a13 = (R.at<double>(2, 0) * f + R.at<double>(2, 2) * (x - x0 + delta_x)) / Zbar;
double a21 = (R.at<double>(0, 1) * f + R.at<double>(0, 2) * (y - y0 + delta_y)) / Zbar;
double a22 = (R.at<double>(1, 1) * f + R.at<double>(1, 2) * (y - y0 + delta_y)) / Zbar;
double a23 = (R.at<double>(2, 1) * f + R.at<double>(2, 2) * (y - y0 + delta_y)) / Zbar;
//外方位元素系数->角元素
double a14 = (y - y0 + delta_y) * sin(Omega) - (((x - x0 + delta_x) / f) * ((x - x0 + delta_x) * cos(Kappa) - (y - y0 + delta_y) * sin(Kappa)) + f * cos(Kappa)) * cos(Omega);
double a15 = -f * sin(Kappa) - ((x - x0 + delta_x) / f) * ((x - x0 + delta_x) * sin(Kappa) + (y - y0 + delta_y) * cos(Kappa));
double a16 = y - y0 + delta_y;
double a24 = -1.0 * (x - x0 + delta_x) * sin(Omega) - (((y - y0 + delta_y) / f) * ((x - x0 + delta_x) * cos(Kappa) - (y - y0 + delta_y) * sin(Kappa)) - f * sin(Kappa)) * cos(Omega);
double a25 = -f * cos(Kappa) - ((y - y0 + delta_y) / f) * ((x - x0 + delta_x) * sin(Kappa) + (y - y0 + delta_y) * cos(Kappa));
double a26 = -1.0 * (x - x0 + delta_x);
//内方位元素系数
double a17 = (x - x0 + delta_x) / f;
double a18 = 1;
double a19 = 0;
double a27 = (y - y0 + delta_y) / f;
double a28 = 0;
double a29 = 1;
//畸变系数
double a110 = -1.0 * (x - x0 + delta_x) * r_2; //k1
double a111 = -1.0 * (x - x0 + delta_x) * r_2 * r_2; //k2
double a112 = -1.0 * (2 * pow((x - x0 + delta_x), 2) + r_2); //p1
double a113 = -2.0 * (y - y0 + delta_y) * (x - x0 + delta_x); //p2
double a210 = -1.0 * (y - y0 + delta_y) * r_2; //k1
double a211 = -1.0 * (y - y0 + delta_y) * r_2 * r_2; //k2
double a212 = -2.0 * (y - y0 + delta_y) * (x - x0 + delta_x); //p1
double a213 = -1.0 * (2 * pow((y - y0 + delta_y), 2) + r_2); //p2
//组合为系数阵
A.at<double>(2 * i, 0) = a11; A.at<double>(2 * i + 1, 0) = a21;
A.at<double>(2 * i, 1) = a12; A.at<double>(2 * i + 1, 1) = a22;
A.at<double>(2 * i, 2) = a13; A.at<double>(2 * i + 1, 2) = a23;
A.at<double>(2 * i, 3) = a14; A.at<double>(2 * i + 1, 3) = a24;
A.at<double>(2 * i, 4) = a15; A.at<double>(2 * i + 1, 4) = a25;
A.at<double>(2 * i, 5) = a16; A.at<double>(2 * i + 1, 5) = a26;
A.at<double>(2 * i, 6) = a17; A.at<double>(2 * i + 1, 6) = a27;
A.at<double>(2 * i, 7) = a18; A.at<double>(2 * i + 1, 7) = a28;
A.at<double>(2 * i, 8) = a19; A.at<double>(2 * i + 1, 8) = a29;
A.at<double>(2 * i, 9) = a110; A.at<double>(2 * i + 1, 9) = a210;
A.at<double>(2 * i, 10) = a111; A.at<double>(2 * i + 1, 10) = a211;
A.at<double>(2 * i, 11) = a112; A.at<double>(2 * i + 1, 11) = a212;
A.at<double>(2 * i, 12) = a113; A.at<double>(2 * i + 1, 12) = a213;
//观测值
l.at<double>(2 * i, 0) = x - (x0 - f * Xbar / Zbar - delta_x);
l.at<double>(2 * i + 1, 0) = y - (y0 - f * Ybar / Zbar - delta_y);
}
}
//---------------------误差方程迭代求解--------------------
void calcu_left(char ctrl_path[],char left_path[])
{
vector<ControlPoint> ControlPoints;
vector<imgPoint> left_imgPoints;
readctrl_ptData(ctrl_path, ControlPoints);
readImgData(left_path, left_imgPoints);
//定义两张相片的内外方位元素
orienParam left_orien;
left_orien.x0 = 0;
left_orien.y0 = 0;
left_orien.f = 27;
left_orien.Xs = 1500;
left_orien.Ys = -200;
left_orien.Zs = -1000;
left_orien.Kappa = 0;
left_orien.Omega = 0;
left_orien.Phi = 0.3;
left_orien.k1 = 0;
left_orien.k2 = 0;
left_orien.p1 = 0;
left_orien.p2 = 0;
//将像素坐标(pixel)转换为图像坐标(mm)
Pixel2Img_with_co_change(left_imgPoints);
//生成点对
vector<merge_point> left_merge_points;
Merge_Point(left_imgPoints, ControlPoints, left_merge_points);
//构建左片系数阵A和常数项l
Mat A(2 * left_merge_points.size(), 13, CV_64FC1);
Mat l(2 * left_merge_points.size(), 1, CV_64FC1);
Mat X(13, 1, CV_64FC1);
int i = 0;
while (true)
{
i++;
printf("%d", i);
//填充系数阵
cal_Coefficient(A, l, left_merge_points, left_orien);
//cout << "L = " << l << endl;
//最小二乘
X = (A.t() * A).inv() * A.t() * l;
//更新外方位元素
left_orien.Xs += X.at<double>(0, 0);
left_orien.Ys += X.at<double>(1, 0);
left_orien.Zs += X.at<double>(2, 0);
left_orien.Phi += X.at<double>(3, 0);
left_orien.Omega += X.at<double>(4, 0);
left_orien.Kappa += X.at<double>(5, 0);
left_orien.f += X.at<double>(6, 0);
left_orien.x0 += X.at<double>(7, 0);
left_orien.y0 += X.at<double>(8, 0);
left_orien.k1 += X.at<double>(9, 0);
left_orien.k2 += X.at<double>(10, 0);
left_orien.p1 += X.at<double>(11, 0);
left_orien.p2 += X.at<double>(12, 0);
if (abs(X.at<double>(0, 0)) < 0.0001 && abs(X.at<double>(1, 0)) < 0.0001 && abs(X.at<double>(2, 0)) < 0.0001 &&
abs(X.at<double>(3, 0)) < 0.0001 && abs(X.at<double>(4, 0)) < 0.0001 && abs(X.at<double>(5, 0)) < 0.0001 &&
abs(X.at<double>(6, 0)) < 0.0001 && abs(X.at<double>(7, 0)) < 0.0001 && abs(X.at<double>(8, 0)) < 0.0001 &&
abs(X.at<double>(9, 0)) < 0.0001 && abs(X.at<double>(10, 0)) < 0.0001 && abs(X.at<double>(11, 0)) < 0.0001 &&
abs(X.at<double>(12, 0)) < 0.0001)
break;
}
//输出定位参数left_orien
cout << "内外方位元素和畸变系数:" << endl;
cout << "Xs: " << left_orien.Xs << endl;
cout << "Ys: " << left_orien.Ys << endl;
cout << "Zs: " << left_orien.Zs << endl;
cout << "Phi: " << left_orien.Phi << endl;
cout << "Omega: " << left_orien.Omega << endl;
cout << "Kappa: " << left_orien.Kappa << endl;
cout << "f: " << left_orien.f << endl;
cout << "x0: " << left_orien.x0 << endl;
cout << "y0: " << left_orien.y0 << endl;
cout << "k1: " << left_orien.k1 << endl;
cout << "k2: " << left_orien.k2 << endl;
cout << "p1: " << left_orien.p1 << endl;
cout << "p2: " << left_orien.p2 << endl;
cout << "----------------------------------" << endl;
Mat V = A * X - l;
Mat vtv = V.t() * V;
double sigma0 = sqrt(vtv.at<double>(0, 0) / (2 * left_merge_points.size() - 13));//单位权中误差
cout << "单位权中误差: " << endl << sigma0 << "mm" << " or " << sigma0 / PIXSIZE << "pixel" << endl;
cout << "----------------------------------" << endl;
//精度统计 --> 各未知数的中误差
Mat Qxx = (A.t() * A).inv();
vector<string> str = { "Xs", "Ys", "Zs", "Phi", "Omega", "Kappa", "f", "x0", "y0", "k1", "k2", "p1", "p2" };
cout << "未知数中误差:" << endl;
for (int i = 0; i < 13; i++)
{
double sigmaXi = sqrt(Qxx.at<double>(i, i)) * sigma0;
cout << str[i] << ": " << sigmaXi << endl;
}
cout << "----------------------------------" << endl;
//精度统计 --> 单位权中误差
cout << "像点观测值残差/pixel" << endl;
cout << "id" << " vx " << " vy" << endl;
for (int i = 0; i < left_merge_points.size(); i++)
{
cout << left_merge_points[i].flag << " " << setiosflags(ios::right) << fixed << setprecision(5) << V.at<double>(2 * i, 0) / PIXSIZE << " " << setiosflags(ios::right) << fixed << setprecision(5) << V.at<double>(2 * i + 1, 0) / PIXSIZE << endl;
}
}
void calcu_right(char ctrl_path[], char right_path[])
{
vector<ControlPoint> ControlPoints;
vector<imgPoint> right_imgPoints;
readctrl_ptData(ctrl_path, ControlPoints);
readImgData(right_path, right_imgPoints);
//定义两张相片的内外方位元素
orienParam right_orien;
right_orien.x0 = 0;
right_orien.y0 = 0;
right_orien.f = 27;
right_orien.Xs = 4500;
right_orien.Ys = 200;
right_orien.Zs = -1000;
right_orien.Kappa = 0;
right_orien.Omega = 0;
right_orien.Phi = -0.2678;
right_orien.k1 = 0;
right_orien.k2 = 0;
right_orien.p1 = 0;
right_orien.p2 = 0;
//将像素坐标(pixel)转换为图像坐标(mm)
Pixel2Img_with_co_change(right_imgPoints);
//生成点对
vector<merge_point> right_merge_points;
Merge_Point(right_imgPoints, ControlPoints, right_merge_points);
//构建左片系数阵A和常数项l
Mat A(2 * right_merge_points.size(), 13, CV_64FC1);
Mat l(2 * right_merge_points.size(), 1, CV_64FC1);
Mat X(13, 1, CV_64FC1);
int i = 0;
while (true)
{
i++;
printf("%d", i);
//填充系数阵
cal_Coefficient(A, l, right_merge_points, right_orien);
//cout << "L = " << l << endl;
//最小二乘
X = (A.t() * A).inv() * A.t() * l;
//更新外方位元素
right_orien.Xs += X.at<double>(0, 0);
right_orien.Ys += X.at<double>(1, 0);
right_orien.Zs += X.at<double>(2, 0);
right_orien.Phi += X.at<double>(3, 0);
right_orien.Omega += X.at<double>(4, 0);
right_orien.Kappa += X.at<double>(5, 0);
right_orien.f += X.at<double>(6, 0);
right_orien.x0 += X.at<double>(7, 0);
right_orien.y0 += X.at<double>(8, 0);
right_orien.k1 += X.at<double>(9, 0);
right_orien.k2 += X.at<double>(10, 0);
right_orien.p1 += X.at<double>(11, 0);
right_orien.p2 += X.at<double>(12, 0);
if (abs(X.at<double>(0, 0)) < 0.0001 && abs(X.at<double>(1, 0)) < 0.0001 && abs(X.at<double>(2, 0)) < 0.0001 &&
abs(X.at<double>(3, 0)) < 0.0001 && abs(X.at<double>(4, 0)) < 0.0001 && abs(X.at<double>(5, 0)) < 0.0001 &&
abs(X.at<double>(6, 0)) < 0.0001 && abs(X.at<double>(7, 0)) < 0.0001 && abs(X.at<double>(8, 0)) < 0.0001 &&
abs(X.at<double>(9, 0)) < 0.0001 && abs(X.at<double>(10, 0)) < 0.0001 && abs(X.at<double>(11, 0)) < 0.0001 &&
abs(X.at<double>(12, 0)) < 0.0001)
break;
}
//输出定位参数right_orien
cout << "内外方位元素和畸变系数:" << endl;
cout << "Xs: " << right_orien.Xs << endl;
cout << "Ys: " << right_orien.Ys << endl;
cout << "Zs: " << right_orien.Zs << endl;
cout << "Phi: " << right_orien.Phi << endl;
cout << "Omega: " << right_orien.Omega << endl;
cout << "Kappa: " << right_orien.Kappa << endl;
cout << "f: " << right_orien.f << endl;
cout << "x0: " << right_orien.x0 << endl;
cout << "y0: " << right_orien.y0 << endl;
cout << "k1: " << right_orien.k1 << endl;
cout << "k2: " << right_orien.k2 << endl;
cout << "p1: " << right_orien.p1 << endl;
cout << "p2: " << right_orien.p2 << endl;
cout << "----------------------------------" << endl;
Mat V = A * X - l;
Mat vtv = V.t() * V;
double sigma0 = sqrt(vtv.at<double>(0, 0) / (2 * right_merge_points.size() - 13));//单位权中误差
cout << "单位权中误差: " << endl << sigma0 << "mm" << " or " << sigma0 / PIXSIZE << "pixel" << endl;
cout << "----------------------------------" << endl;
//精度统计 --> 各未知数的中误差
Mat Qxx = (A.t() * A).inv();
vector<string> str = { "Xs", "Ys", "Zs", "Phi", "Omega", "Kappa", "f", "x0", "y0", "k1", "k2", "p1", "p2" };
cout << "未知数中误差:" << endl;
for (int i = 0; i < 13; i++)
{
double sigmaXi = sqrt(Qxx.at<double>(i, i)) * sigma0;
cout << str[i] << ": " << sigmaXi << endl;
}
cout << "----------------------------------" << endl;
//精度统计 --> 单位权中误差
cout << "像点观测值残差/pixel" << endl;
cout << "id" << " vx " << " vy" << endl;
for (int i = 0; i < right_merge_points.size(); i++)
{
cout << right_merge_points[i].flag << " " << setiosflags(ios::right) << fixed << setprecision(5) << V.at<double>(2 * i, 0) / PIXSIZE << " " << setiosflags(ios::right) << fixed << setprecision(5) << V.at<double>(2 * i + 1, 0) / PIXSIZE << endl;
}
}
//------------------------主函数------------------------
int main()
{
//读取控制点数据和左右片标志点的像素坐标
char ctrl_ptfile[] = "C:/Users/LENOVO/Desktop/近景摄影测量/2024实习_近景控制场_20240515.txt";
//char left_file[] = "C:/Users/LENOVO/Desktop/近景摄影测量/coordinates.txt";
//char right_file[] = "C:/Users/LENOVO/Desktop/近景摄影测量/coordinates_right.txt";
char left_file[] = "C:/Users/LENOVO/Desktop/近景摄影测量/datapt/points_imgL.txt";
char right_file[] = "C:/Users/LENOVO/Desktop/近景摄影测量/datapt/points_imgR.txt";
printf("-----------左片-----------------\n");
calcu_left(ctrl_ptfile,left_file);
printf("-----------右片-----------------\n");
calcu_right(ctrl_ptfile, right_file);
return 0;
}
// 运行程序: Ctrl + F5 或调试 >“开始执行(不调试)”菜单
// 调试程序: F5 或调试 >“开始调试”菜单
// 入门使用技巧:
// 1. 使用解决方案资源管理器窗口添加/管理文件
// 2. 使用团队资源管理器窗口连接到源代码管理
// 3. 使用输出窗口查看生成输出和其他消息
// 4. 使用错误列表窗口查看错误
// 5. 转到“项目”>“添加新项”以创建新的代码文件,或转到“项目”>“添加现有项”以将现有代码文件添加到项目
// 6. 将来,若要再次打开此项目,请转到“文件”>“打开”>“项目”并选择 .sln 文件
三、单片空间后方交会结果与分析
在这一步我设立了两组数据运行计算,分别利用81(左)/63(右)对控制点和9(左)/19(右)对控制点进行控制计算。
3.1未知数求解结果
表1 未知数求解结果
|
未知数 |
81左片 |
9左片 |
63右片 |
19右片 |
|
Xs |
1480.28 |
1468.2 |
3734.31588 |
3733.75331 |
|
Ys |
-61.0423 |
-63.0068 |
-63.01434 |
-66.35926 |
|
Zs |
-1569.29 |
-1565.43 |
-1439.08581 |
-1421.84848 |
|
Phi |
0.380894 |
0.386272 |
-0.27555 |
-0.26203 |
|
Omega |
-0.0746003 |
-0.0756672 |
-0.06311 |
-0.05947 |
|
Kappa |
-0.0222901 |
-0.0222292 |
-0.02232 |
-0.02173 |
|
f |
28.0798 |
28.2235 |
27.94212 |
28.07034 |
|
x0 |
0.153123 |
0.227625 |
-0.06787 |
0.26542 |
|
y0 |
-0.0704426 |
-0.119314 |
-0.08808 |
-0.01218 |
|
k1 |
2.78244e-05 |
0.000144189 |
0.00006 |
0.00009 |
|
k2 |
6.55726e-08 |
-1.12597e-06 |
-0.00000 |
-0.00000 |
|
p1 |
-0.000103156 |
-0.000236663 |
0.00003 |
-0.00022 |
|
p2 |
1.41688e-05 |
1.1339e-05 |
0.00002 |
-0.00006 |
3.2精度统计-中误差
表2 中误差
|
未知数 |
81左片 |
9左片 |
63右片 |
19右片 |
|
|
0.0084879 |
0.00189872 |
0.00549 |
0.00233 |
|
Xs |
1.31468 |
8.51379 |
0.99255 |
1.14192 |
|
Ys |
0.763872 |
2.39405 |
0.66409 |
0.97752 |
|
Zs |
2.6982 |
23.6963 |
2.55542 |
5.26219 |
|
Phi |
0.00264403 |
0.00483118 |
0.00210 |
0.00198 |
|
Omega |
0.00156104 |
0.00297731 |
0.00139 |
0.00152 |
|
Kappa |
0.000203308 |
0.000290429 |
0.00014 |
0.00012 |
|
f |
0.0243822 |
0.188117 |
0.02080 |
0.04314 |
|
x0 |
0.0734404 |
0.145106 |
0.05773 |
0.05455 |
|
y0 |
0.0432928 |
0.0890243 |
0.03780 |
0.03927 |
|
k1 |
1.22928e-05 |
3.4379e-05 |
0.00001 |
0.00001 |
|
k2 |
6.32626e-08 |
4.50327e-07 |
0.00000 |
0.00000 |
|
p1 |
3.40386e-05 |
5.49139e-05 |
0.00003 |
0.00003 |
|
p2 |
2.11434e-05 |
3.7823e-05 |
0.00002 |
0.00002 |
3.3精度统计-像点量测残差
第一组81左片/63右片结果(单位/pixel):
表3 像点量测残差
|
左片点号 |
x残差 |
y残差 |
右片点号 |
x残差 |
y残差 |
|
433 |
-0.62095 |
0.13756 |
310 |
-1.61662 |
0.15782 |
|
432 |
-1.74451 |
-0.33490 |
311 |
-1.65273 |
-0.03667 |
|
431 |
-1.57404 |
-0.88220 |
404 |
0.28651 |
0.32884 |
|
430 |
-0.64663 |
-1.14805 |
403 |
0.22159 |
0.07376 |
|
336 |
4.10305 |
1.22820 |
402 |
0.40321 |
-0.28741 |
|
335 |
-2.75036 |
-13.00877 |
215 |
1.02983 |
-0.13605 |
|
334 |
2.64072 |
0.36014 |
214 |
1.05181 |
-0.32796 |
|
333 |
2.41191 |
-0.46022 |
213 |
1.17226 |
0.07413 |
|
332 |
1.11780 |
12.39554 |
212 |
0.88652 |
0.10367 |
|
331 |
3.15618 |
0.04941 |
211 |
1.12198 |
0.56216 |
|
330 |
4.12387 |
-0.22648 |
210 |
1.53278 |
0.72635 |
|
444 |
0.60272 |
1.37030 |
414 |
0.02529 |
0.47771 |
|
443 |
-0.23673 |
0.09315 |
413 |
0.03613 |
0.10312 |
|
442 |
-1.13555 |
-0.33010 |
412 |
-0.09874 |
-0.12480 |
|
440 |
-0.63237 |
-0.76098 |
411 |
0.07119 |
-0.39951 |
|
136 |
-2.11843 |
0.74448 |
325 |
-0.17913 |
0.07580 |
|
135 |
-2.89531 |
0.15862 |
324 |
-0.66040 |
0.05828 |
|
134 |
-3.22999 |
0.42433 |
323 |
-0.83549 |
0.17139 |
|
133 |
-3.29503 |
-0.17951 |
322 |
-0.80437 |
0.09284 |
|
132 |
-3.09568 |
0.08364 |
321 |
-0.35824 |
0.01338 |
|
453 |
-0.88193 |
0.17537 |
320 |
-0.03015 |
0.68011 |
|
452 |
-0.65304 |
-0.48186 |
136 |
-2.25057 |
-0.26022 |
|
451 |
-0.80316 |
-0.36406 |
135 |
-2.53939 |
0.21181 |
|
450 |
-0.76020 |
-0.29134 |
133 |
-3.17127 |
0.01906 |
|
224 |
1.52084 |
0.40592 |
132 |
-2.26306 |
0.82028 |
|
223 |
2.14544 |
-0.91089 |
336 |
1.91394 |
1.14509 |
|
463 |
-0.11589 |
-0.61793 |
335 |
-3.01975 |
-10.80008 |
|
462 |
0.16913 |
-1.13554 |
334 |
1.79462 |
1.10271 |
|
461 |
0.07715 |
0.88509 |
330 |
2.08414 |
-0.52604 |
|
460 |
-0.29776 |
-0.39359 |
224 |
1.24655 |
0.79333 |
|
146 |
1.78857 |
0.13480 |
223 |
1.85110 |
-0.52165 |
|
145 |
0.79470 |
-1.26319 |
444 |
-0.06183 |
1.48511 |
|
144 |
0.26271 |
-1.34149 |
443 |
0.13676 |
0.08278 |
|
143 |
-0.04321 |
1.51644 |
442 |
0.56908 |
-0.43631 |
|
142 |
0.69686 |
1.16097 |
441 |
0.46921 |
0.77800 |
|
141 |
1.92899 |
0.76305 |
146 |
0.68535 |
0.78576 |
|
474 |
0.78046 |
0.42144 |
145 |
0.84569 |
-0.43364 |
|
473 |
-0.68182 |
-0.78100 |
144 |
0.75879 |
-0.39842 |
|
472 |
-1.80948 |
-1.36192 |
143 |
0.65972 |
1.38616 |
|
471 |
-1.88643 |
0.64618 |
141 |
1.23218 |
1.48388 |
|
470 |
-0.28885 |
-0.25348 |
346 |
-1.97358 |
0.68904 |
|
356 |
2.60846 |
0.46893 |
345 |
-1.85002 |
1.12666 |
|
355 |
2.13113 |
0.12746 |
344 |
-2.03743 |
-0.16791 |
|
354 |
0.35235 |
-0.56942 |
341 |
-1.81012 |
1.11004 |
|
353 |
-0.31778 |
-1.14439 |
340 |
-0.73490 |
0.61732 |
|
352 |
-0.60365 |
0.37041 |
453 |
0.41776 |
0.41752 |
|
351 |
0.05741 |
0.74650 |
452 |
-0.62342 |
-0.47697 |
|
350 |
2.88141 |
-1.32786 |
451 |
-0.17934 |
0.46867 |
|
484 |
1.16442 |
0.25661 |
450 |
0.94827 |
-0.75538 |
|
483 |
0.09229 |
0.06645 |
463 |
0.55684 |
0.44397 |
|
482 |
-1.70831 |
-0.78474 |
460 |
0.07882 |
0.31811 |
|
481 |
-1.77769 |
-0.15765 |
156 |
-0.52812 |
-1.24965 |
|
480 |
0.09904 |
-0.89155 |
155 |
-0.22708 |
-0.82278 |
|
156 |
1.46885 |
-0.23315 |
356 |
0.92845 |
-0.36385 |
|
155 |
0.17655 |
-0.47601 |
355 |
1.03540 |
-0.57469 |
|
154 |
0.22224 |
0.15310 |
354 |
1.26388 |
-0.13377 |
|
153 |
0.05616 |
0.04002 |
353 |
1.93696 |
0.41072 |
|
152 |
-0.13849 |
0.30598 |
352 |
1.90560 |
0.41165 |
|
365 |
2.09570 |
0.17810 |
474 |
-0.62630 |
-0.43816 |
|
364 |
1.03931 |
-0.02909 |
473 |
-0.33119 |
-0.42915 |
|
504 |
1.76054 |
0.61336 |
472 |
-0.15612 |
-0.28829 |
|
503 |
0.40505 |
-0.27191 |
471 |
-0.09200 |
0.03536 |
|
502 |
-0.81404 |
0.53433 |
470 |
-0.44685 |
0.54694 |
|
501 |
-0.37033 |
-0.38926 | |||
|
514 |
1.24532 |
0.59151 | |||
|
512 |
0.50862 |
-0.31846 | |||
|
511 |
0.51372 |
-0.80161 | |||
|
510 |
1.14079 |
-1.02934 | |||
|
375 |
-0.93836 |
0.29956 | |||
|
374 |
-1.76864 |
0.12483 | |||
|
373 |
-1.48539 |
13.58485 | |||
|
372 |
-2.59171 |
-0.75417 | |||
|
371 |
-1.77049 |
-0.72716 | |||
|
370 |
-1.18541 |
-1.05700 | |||
|
166 |
0.31974 |
-0.72051 | |||
|
165 |
-0.41795 |
-0.58058 | |||
|
164 |
-0.54549 |
-0.40483 | |||
|
163 |
-0.36945 |
-0.52229 | |||
|
162 |
0.15837 |
-0.54022 | |||
|
161 |
0.18199 |
-1.35793 |
第二组9左片/19右片结果(单位/pixel):
表4 像点量测残差
|
左片点号 |
x残差 |
y残差 |
右片点号 |
x残差 |
y残差 |
|
135 |
-0.04707 |
-0.21176 |
215 |
0.10675 |
0.58274 |
|
134 |
-0.20008 |
0.06572 |
214 |
-0.01231 |
-0.62148 |
|
133 |
0.09252 |
0.01435 |
213 |
-0.10637 |
-0.44505 |
|
224 |
0.55707 |
0.07368 |
212 |
-0.29370 |
-0.24348 |
|
222 |
-0.35796 |
-0.42383 |
211 |
0.59302 |
0.26874 |
|
144 |
0.19882 |
-0.10329 |
136 |
0.16293 |
-0.49429 |
|
143 |
0.03227 |
0.44675 |
135 |
-0.55786 |
-0.51933 |
|
155 |
-0.05753 |
0.41565 |
133 |
-1.62403 |
0.21016 |
|
153 |
-0.21803 |
-0.27728 |
132 |
-0.33377 |
0.77563 |
|
224 |
0.74483 |
-0.12368 | |||
|
223 |
-0.01780 |
-0.26971 | |||
|
146 |
0.25347 |
0.01180 | |||
|
145 |
0.82920 |
-0.46231 | |||
|
144 |
0.00581 |
-0.16244 | |||
|
143 |
0.14427 |
0.60631 | |||
|
156 |
0.71564 |
-0.37473 | |||
|
155 |
-0.76909 |
0.57903 | |||
|
354 |
0.06517 |
0.29899 | |||
|
352 |
0.09385 |
0.38309 |
四、误差剔除
观察表1未知数求解结果,可以发现,使用较少的控制点和较多的控制点得到的结果相差较大,外方位元素可相差数十毫米,但整体解求结果无明显错误。
观察表2可知,利用较少的控制点得到的结果误差较明显,例如Zs中误差,使用较少控制点得到的中误差达到了23.6963mm,而使用较多控制点得到的中误差减小到了2.6982mm。使用较多控制点计算得到的结果虽然误差明显下降且误差较小,外方位元素中误差可达到2~3mm以内,像点量测单位权中误差控制在了亚像素级别,但是像点量测单位权中误差却比使用较少控制点得到的误差大,我认为是较多的控制点中有一些量测误差过大的点。
观察表3、4可以看出,两组实验得到的像点观测值残差都能基本保持在一个像素以内,而且正如上述观点,使用较多的控制点计算时,有许多像点量测误差过大的点,存在明显的量测错误,需要剔除或修改,否则影响整体精度。例如左片的:432、332、335、373、143号点,右片的:335、135、136、133号点,他们的量测误差达到了2~3个像元,尤其是335号点达到了数十个像元。
我通过剔除与重新量测这些点来解决这个问题,剔除这些点后,单位权中误差减小到了和使用较少控制点相近的误差值,且所有未知数的误差值均有所下降,达到较为理想的结果。
表5 剔除粗差前后中误差
|
未知数 |
81左片 |
剔除后左片 |
63右片 |
剔除后右片 |
|
|
0.0084879 |
0.0024506 |
0.00549 |
0.00213 |
|
Xs |
1.31468 |
0.58721 |
0.99255 |
0.55265 |
|
Ys |
0.763872 |
0.326306 |
0.66409 |
0.39534 |
|
Zs |
2.6982 |
1.1931 |
2.55542 |
1.53021 |
|
Phi |
0.00264403 |
0.00123878 |
0.00210 |
0.00120 |
|
Omega |
0.00156104 |
0.000752514 |
0.00139 |
0.00080 |
|
Kappa |
0.000203308 |
9.35626e-05 |
0.00014 |
0.00008 |
|
f |
0.0243822 |
0.0107238 |
0.02080 |
0.01171 |
|
x0 |
0.0734404 |
0.0344217 |
0.05773 |
0.03311 |
|
y0 |
0.0432928 |
0.0210118 |
0.03780 |
0.02168 |
|
k1 |
1.22928e-05 |
5.32986e-06 |
0.00001 |
0.00001 |
|
k2 |
6.32626e-08 |
2.78141e-08 |
0.00000 |
0.00000 |
|
p1 |
3.40386e-05 |
1.58742e-05 |
0.00003 |
0.00002 |
|
p2 |
2.11434e-05 |
9.89134e-06 |
0.00002 |
0.00001 |
最终得到的未知数结算结果为(其他未知数变化微小,在上述表中已经展示过,此处不再重复,仅展示外方位线元素):
表6 剔除误差前后未知数结果(单位/mm)
|
未知数 |
81左片 |
剔除后左片 |
63右片 |
剔除后右片 |
|
Xs |
1480.28 |
1479.45 |
3734.31588 |
3733.87481 |
|
Ys |
-61.0423 |
-60.9722 |
-63.01434 |
-63.01913 |
|
Zs |
-1569.29 |
-1566.85 |
-1439.08581 |
-1443.43854 |
五、误差来源分析
经过误差剔除与重新测量(手动平移对准点)后的结果达到了较为理想的值,我将粗差较大的点记录下来,返回到像点量测程序中去再次框选查看,发现这些粗差点有一些规律:
- 位于影像边缘或倾斜程度较大,呈现椭圆形或变形。
- 标志点受光照射,有反光。
- 像点量测程序定位点存在明显偏差,需要手动调整
所以像点量测程序其实也有待优化,可以使用其他的算法对抗这些存在的问题。
六、误差影响分析
若手动加入一个很大的粗差,究竟会对整体求解造成哪些影响?我将后方交会程序中的左片的433号点的x坐标从41.38改到1000,手动加入了一个非常大的粗差,运行代码,发现会造成以下问题:
- 迭代次数变多:从18次增加到了47次收敛
- 未知数计算值明显变化:
表7 加入粗差前后未知数值
|
未知数 |
后方交会 |
加入粗差 |
|
Xs |
1480.28 |
1569.57 |
|
Ys |
-61.0423 |
-70.1796 |
|
Zs |
-1569.29 |
-1710.93 |
3.统计误差变大
表8 加入粗差前后中误差
|
未知数 |
误差值 |
未知数 |
误差值 |
|
|
73.34 |
y0 |
1.6432928 |
|
Xs |
46.9177 |
k1 |
0.000340061 |
|
Ys |
25.5392 |
k2 |
8.70585e-07 |
|
Zs |
91.357 |
p1 |
0.00104376 |
|
Phi |
0.08264403 |
p2 |
0.000760362 |
|
Omega |
0.06456104 | ||
|
Kappa |
0.008203308 | ||
|
f |
0.8243822 | ||
|
x0 |
2.1734404 |
- 像点量测残差变大,且带动周围点残差变大
表9 加入粗差前后像点量测残差
|
像点号左 |
x残差/mm |
y残差/mm |
|
433 |
-763.86253 |
-10.21276 |
|
431 |
37.21429 |
16.95733 |
|
444 |
86.36103 |
-21.28834 |
|
443 |
103.39708 |
-7.70386 |
|
442 |
94.48565 |
16.12521 |
|
440 |
2.89685 |
13.26422 |
|
136 |
23.68336 |
2.66507 |
|
135 |
33.94583 |
6.55190 |
|
134 |
27.81508 |
16.64054 |
|
133 |
-3.13424 |
18.49584 |
|
453 |
77.65230 |
-20.22846 |
|
452 |
71.50186 |
11.07310 |
|
451 |
46.72870 |
31.99060 |
|
450 |
4.75211 |
25.33406 |
|
224 |
27.32684 |
-17.38990 |
|
223 |
26.81550 |
3.32593 |
|
463 |
43.51226 |
-25.44046 |
|
462 |
39.26717 |
6.16854 |
七、参考文献
冯文灏.近景摄影测量[M].武汉:武汉大学出版社,2002,116-159
欢迎指正!祝学业有成、学习顺利、开心每一天


















 6391
6391

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









