




 本文详细讲解了OSI模型与TCP/IP协议在网络分层中的应用,通过图解阐述了客户端发送请求和服务器接收过程。从宏观角度探讨了两者消息传递的全程。
本文详细讲解了OSI模型与TCP/IP协议在网络分层中的应用,通过图解阐述了客户端发送请求和服务器接收过程。从宏观角度探讨了两者消息传递的全程。
一.计算机网络模型
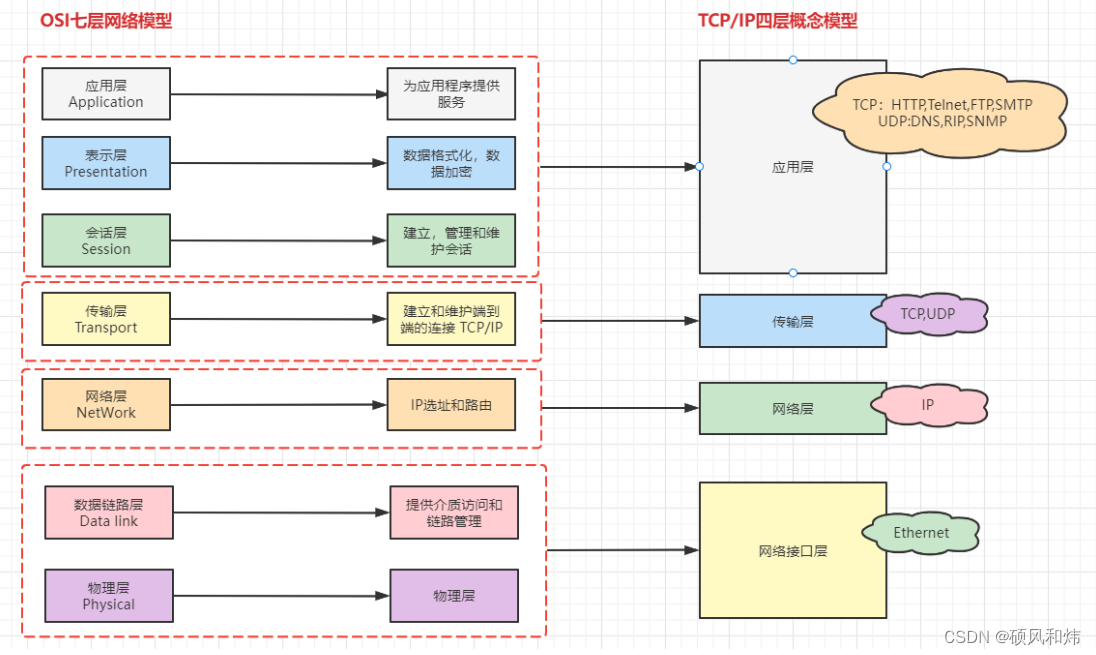
1.1 OSI和TCP/IP协议以及网络分层的思想
OSI:开放系统互联参考模型(Open System Interconnect)
TCP/IP:传输控制协议/网际协议(Transmission Control/Internet Protocol),是指能够在多个不同网络间实现信息传输的协议簇。TCP/IP协议不仅仅指的是TCP 和IP两个协议,而是指一个由FTP、SMTP、TCP、UDP、IP等协议构成的协议簇, 只是因为在TCP/IP协议中TCP协议和IP协议最具代表性,所以被称为TCP/IP协议。
分层思想:分层的基本想法是每一层都在它的下层提供的服务基础上提供更高级的增值服务,而最高层提供能运行分布式应用程序的服务。
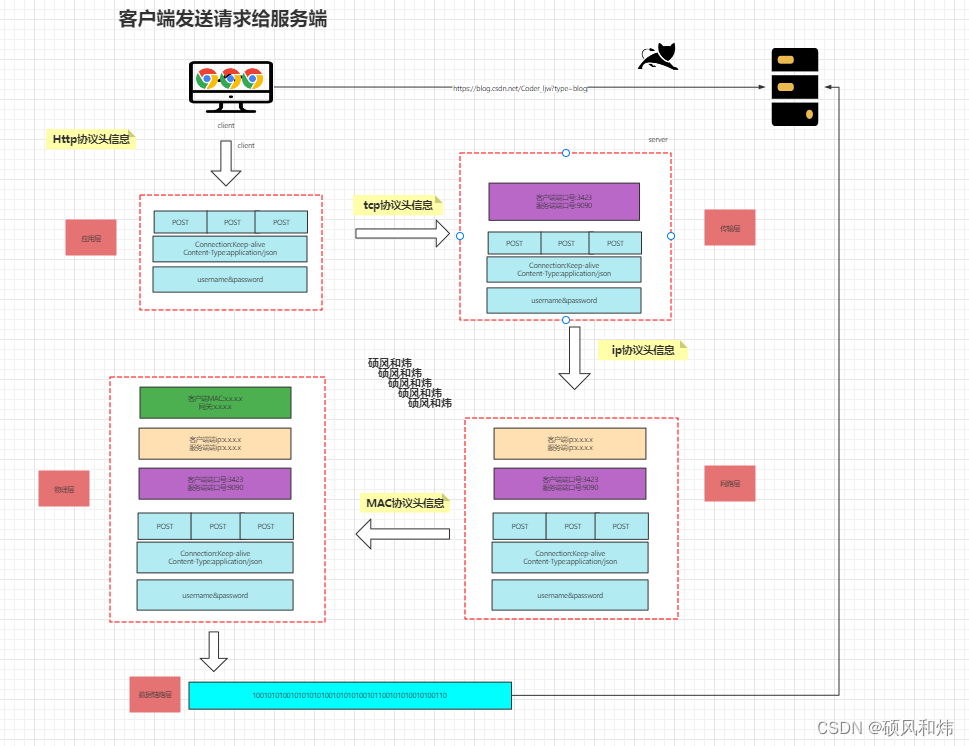
1.2 客户端发送请求图解过程
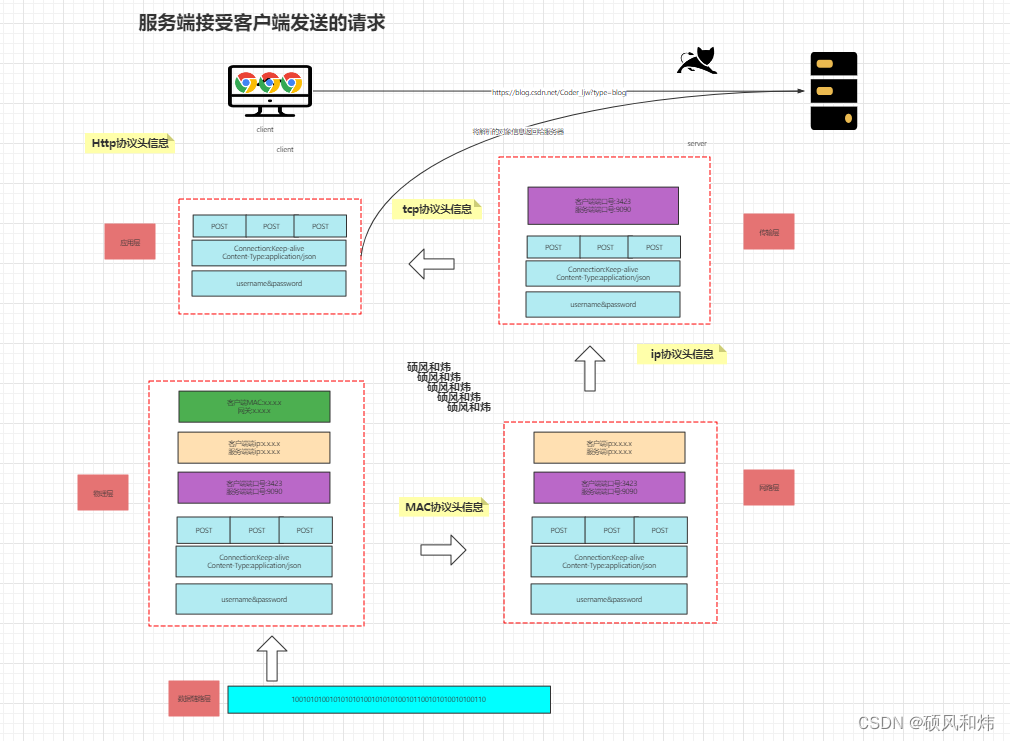
1.3 服务端接受请求图解过程
二.从宏观的角度分析客户端与服务端发送消息的全过程解析

好了,到这里【计算机网络模型、客户端与服务端请求与解析过程、宏观的角度分析客户端与服务端发送消息的全过程解析】就结束了,关于计算机网络更多的知识持续更新创作中。敬请期待!!!



















 1113
1113

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











