 DT-MARL:Agent的未卜先知术
DT-MARL:Agent的未卜先知术




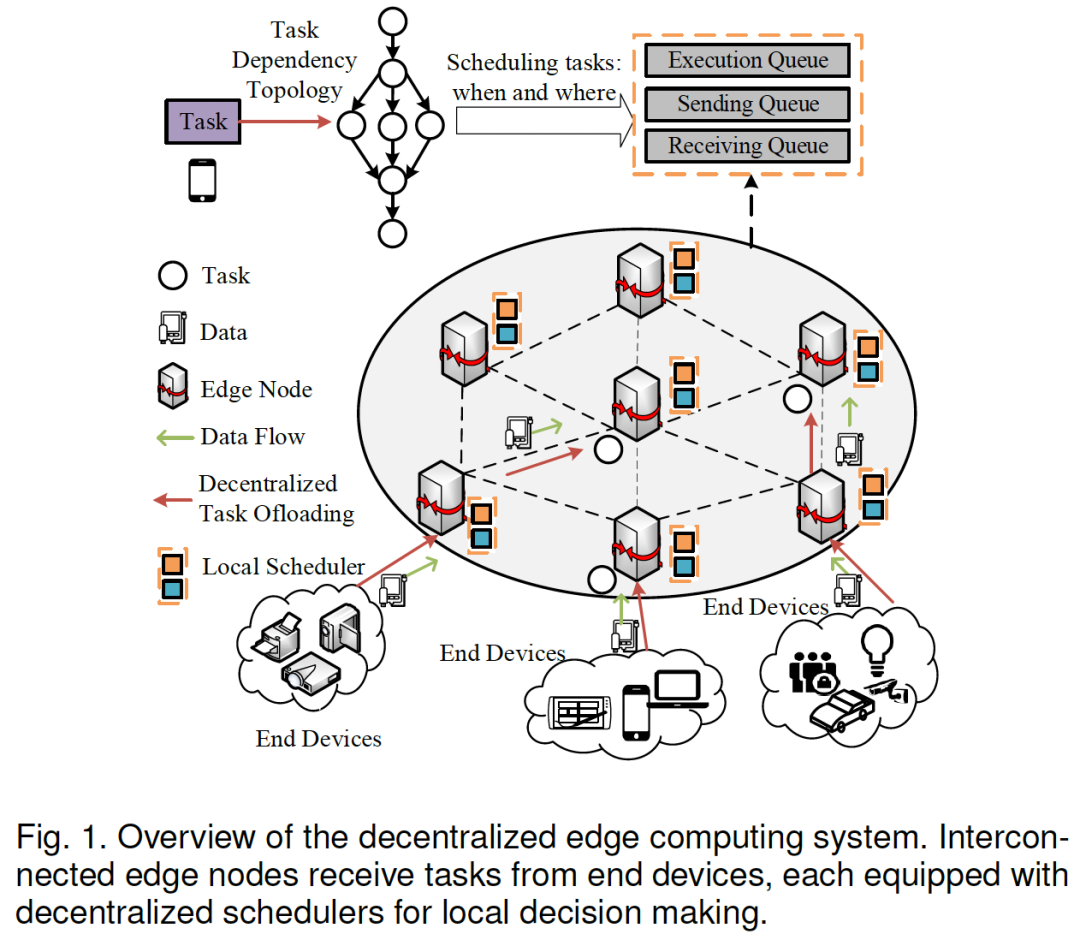
想象一下,在一个繁忙的边缘计算网络(比如智慧城市或自动驾驶的后台)中,一群AI“工人”(边缘节点)需要协同处理一堆复杂且相互依赖的任务。它们没有“总指挥”(去中心化),还得保证任务100%可靠,不能失败。
这就是个大难题!
- • 痛点1: 传统的“中央大脑”式调度,一旦“大脑”宕机,整个系统就瘫痪了,而且通信开销巨大。
- • 痛点2: 现有的“去中心化”方法,大多是各自为战的“莽夫”,它们往往忽略了任务之间的依赖关系(比如必须先A后B),也无视了网络带宽的限制(只管分工,不管路堵不堵)。这导致资源利用率低下,系统可靠性极差。
那么,如何让一群“各自为战”的Agent,既能高效协作,又能保证万无一失呢?这篇论文给出了一个极其巧妙的答案。
这篇论文发表在CCF A,中科院一区顶刊 IEEE Transactions on Mobile Computing (TMC) 上,标题是:协作边缘计算中的去中心化任务卸载:一种数字孪生辅助的多智能体强化学习方法
《Decentralized Task Offloading in Collaborative Edge Computing: A Digital Twin assisted Multi-agent Reinforcement Learning Approach》
链接🔗:
https://ieeexplore.ieee.org/document/11224639
一、论文速览:概览与核心贡献
1. 这篇论文是做什么的?
这篇论文正面硬刚了边缘计算中的一个核心难题:“可靠性感知下的依赖任务卸载”问题。
- • 可靠性感知: 必须考虑节点可能失败。
- • 依赖任务: 必须处理有前后顺序的任务(如视频分析流程)。
- • 去中心化卸载: 没有中央协调者,每个节点(Agent)自己决定任务是本地执行,还是“甩锅”给别人。
目标: 在满足上述所有苛刻条件的同时,最大化整个系统的“任务成功率”。
为了解决这个问题,作者首先构建了整个系统的模型。
2. 核心思想/方法论:DT-MARL
论文的“杀手锏”是提出了一种名为 DT-MARL 的新框架。这可不是简单的“A+B”,而是让多智能体强化学习(MARL)和数字孪生(Digital Twin)“灵魂合体”。
简单来说,每个边缘节点都是一个MARL智能体(Agent),它们自己做决策。但为了不让它们“瞎做”,研究者给每个Agent都配了一个“随身模拟器”——数字孪生(DT)。
这个DT有三大“超能力”:
- 降低探索风险: Agent可以在DT这个“虚拟世界”里大胆试错,而不会搞崩真实的物理系统。这对于自动驾驶、医疗等高危场景至关重要。
- 提高样本效率: DT可以“脑补”出大量的未来数据,帮助Agent更快地学习和收敛,解决MARL的“训练慢”顽疾。
- 实现主动决策: 这是最关键的一点!DT能实时预测“如果我这么做,未来会发生什么?”(比如任务要花多久,节点会不会宕机)。Agent们拿着这份“未来剧本”再做决策,从“被动反应”升级为“主动预判”。
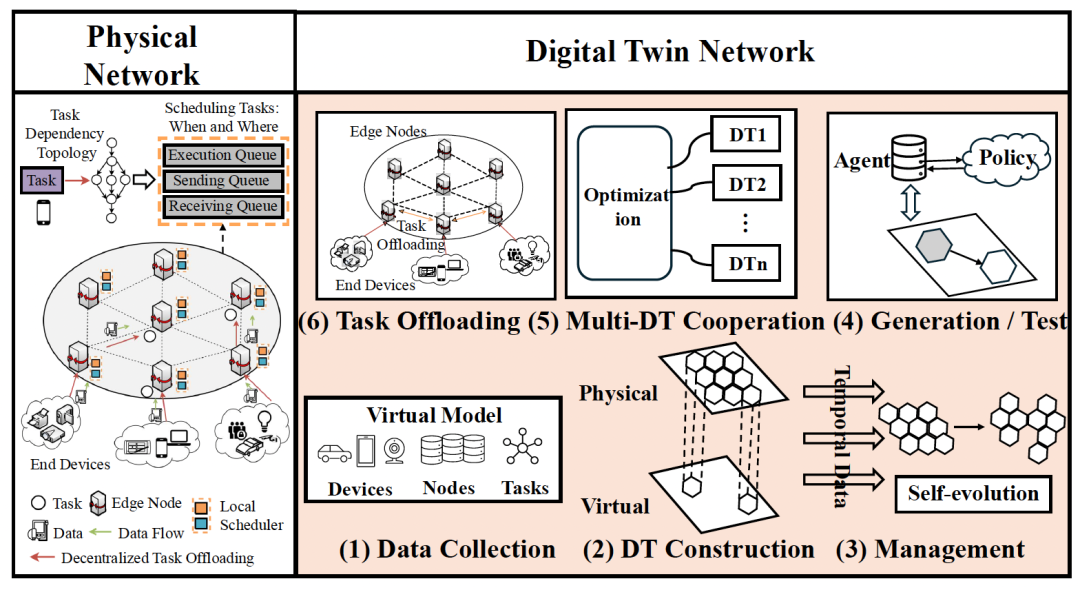
分层数字孪生架构图。它展示了工作流程:(1) 从“Physical Network”(物理网络)收集数据。(2) 构建“Virtual Model”(虚拟模型)。(3) 在“Management”(管理)阶段,Agent与Policy(策略)交互,DTs之间也进行“Multi-DT Cooperation”(多DT协作)。(4) 生成/测试。(5) 协作。(6) 最终执行“Task Offloading”(任务卸载)。
二、Agent如何实现“未卜先知”?
1. Agent架构剖析:前瞻性的“增强状态”
传统的Agent是“反应式”的(看到拥堵了才绕路)。但DT-MARL的Agent是“前瞻性”的。
它是如何实现的呢?
论文的精髓在于,它重新定义了Agent的“状态空间”。在任意时刻 ,Agent的决策依据不仅仅是当前状态,而是被“增强”为:
- 智能体 在 时刻的当前观测(如本地任务队列、可用算力)。
- 数字孪生(DT)在 时刻预测出的 时刻的未来状态(如预测的带宽、预测的节点故障率)。
这就好像你开车时,你不仅在看眼前的路况(当前状态),还在看导航系统预测的“10分钟后的路况”(未来状态)。你的决策自然更优!
2. 关键机制揭秘:DT-MARL的工作流
这套系统是如何运转的?
- 问题建模: 整个系统被建模为一个“网络化分布式部分可观马尔可夫决策过程”(ND-POMDP)。这是MARL领域的“行话”,意思就是:一群Agent,视野(信息)有限,需要合作解决一个全局问题。
- 智能体(Agent): 每个边缘节点都是一个Agent。
- 混合动作空间: Agent的动作是“混合”的,非常符合现实:
- 离散动作: 决定把这个子任务交给谁(节点A、B还是C?)。
- 连续动作: 如果交给B,我该给这个任务分配多少带宽?
- 奖励机制(Shapley Q-value): 目标是最大化全局的“任务成功率”。为了公平地给每个Agent“发工资”(分配奖励),论文用了一种“沙普利值”(Shapley Value)的思想,来估算每个Agent对“集体胜利”的边际贡献。
- 训练范式(CTDE):
- 集中式训练(CT): 在“训练营”(模拟器)里,所有Agent可以共享信息,在DT的帮助下高效学习策略。
- 去中心化执行(DE): 到了“真实战场”,每个Agent就只看自己的本地信息和DT的预测,独立、快速地作出决策。
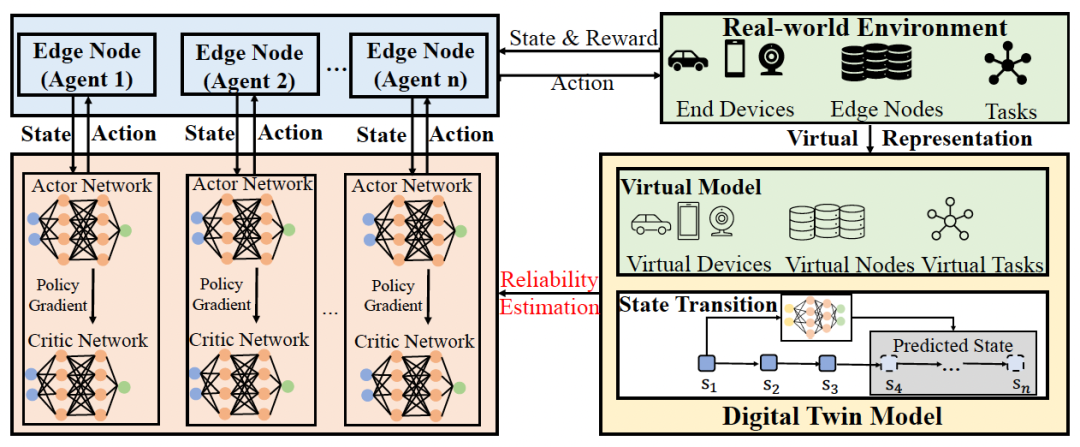
这就是DT-MARL的“集中式训练”框架图。左侧是多个Agent(Edge Node 1…n),每个Agent都有自己的Actor Network(演员网络)和Critic Network(评论家网络)。它们与“Real-world Environment”(真实环境)交互,产生“State & Reward”(状态和奖励)。同时,右侧的“Digital Twin Model”(数字孪生模型)提供了“Virtual Representation”(虚拟表示),帮助Agent进行“Reliability Estimation”(可靠性估计)和预测“Predicted State”(预测状态)。
三、实验验证:效果究竟如何?
“是骡子是马,拉出来遛遛。” 论文的实验设计非常扎实,用了“真实世界”(阿里巴巴数据集)和“模拟世界”(随机DAG生成)两套数据。
核心指标: 任务成功率(TSR)。
对照组(基线):
- LE(本地执行): 打死不卸载,累死自己。
- RATC: 一种简单的启发式算法。
- MARL-NTD(无任务依赖): MARL,但无视任务A必须在B之前的规则。
- MARL-NBW(无带宽分配): MARL,但只管分配任务,不管路(带宽)堵不堵。
- MARL-NTR(无可靠性): MARL,但不考虑节点会挂掉。
实验结果与分析
1.DT-MARL 完胜!
在所有场景下(不同任务量、不同带宽、不同节点数),DT-MARL都“吊打”了所有基线。在真实数据集上,任务成功率最高时比“本地执行”(LE)提升了 32.00%,在合成数据集上提升了 32.43%!
2.消融实验的意义
那些MARL-NTD、NBW、NTR(即“残血版”MARL)的表现都远远不如DT-MARL。这完美证明了:同时考虑任务依赖、带宽分配、可靠性这三件事,缺一不可!而DT-MARL是唯一一个把这三者都“管起来”的去中心化方法。
3.泛化能力
作者还做了泛化实验。模型在(10个节点,25个设备)上训练,然后直接拿到(50-100个设备)的全新未知环境中测试。结果显示,TSR虽然有所下降,但依然保持了可接受的性能,证明了DT-MARL具有不错的泛化能力。
4.系统开销
很多人会担心“数字孪生”这么高级,是不是很慢?实验证明,即使在100个节点的网络中,DT-MARL的决策开销(包括DT预测)也低于0.2秒,完全可以用于实时决策。
四、洞察与展望
1. 论文亮点与贡献
这篇论文最大的亮点,是把数字孪生(DT)从一个“监测”工具,升级为了一个“决策赋能”工具。它不再是MARL的“附属品”,而是成为了Agent的“外置大脑”和“未来探测器”。
通过将DT的“预测能力”融入Agent的“状态空间”,它完美地解决了MARN的三大“原罪”:探索风险高、样本效率低、被动决策。
2. 潜在应用场景
这套“DT-MARL”框架的应用场景非常广。任何需要高可靠、低延迟、去中心化协作的场景,都大有可为:
- 自动驾驶车队: 车辆(Agent)之间协同决策,DT预测其他车辆的意图和路况。
- 工业物联网(IIoT): 产线上的机器(Agent)协同,DT预测设备故障和物流瓶颈。
- 智慧城市/视频分析: 摄像头和边缘服务器(Agent)协同,DT预测人流和计算负载。
- 具身智能: 一群机器人(Agent)在未知环境中协作,DT模拟物理交互,预测行动后果。
3. 局限性与未来研究方向
作者也坦承,目前的模型虽然对负载(用户增多)有一定的泛化能力,但如果网络拓扑结构(比如节点连接方式)大改,还是需要重新训练。
这指向了未来的研究方向:开发更具普适性的“世界模型”(World Models),让Agent在完全陌生的网络环境中也能快速适应,真正实现“即插即用”的智能协作。
那么,如何系统的去学习大模型LLM?
作为一名深耕行业的资深大模型算法工程师,我经常会收到一些评论和私信,我是小白,学习大模型该从哪里入手呢?我自学没有方向怎么办?这个地方我不会啊。如果你也有类似的经历,一定要继续看下去!这些问题啊,也不是三言两语啊就能讲明白的。
所以我综合了大模型的所有知识点,给大家带来一套全网最全最细的大模型零基础教程。在做这套教程之前呢,我就曾放空大脑,以一个大模型小白的角度去重新解析它,采用基础知识和实战项目相结合的教学方式,历时3个月,终于完成了这样的课程,让你真正体会到什么是每一秒都在疯狂输出知识点。
由于篇幅有限,⚡️ 朋友们如果有需要全套 《2025全新制作的大模型全套资料》,扫码获取~

👉大模型学习指南+路线汇总👈
我们这套大模型资料呢,会从基础篇、进阶篇和项目实战篇等三大方面来讲解。


👉①.基础篇👈
基础篇里面包括了Python快速入门、AI开发环境搭建及提示词工程,带你学习大模型核心原理、prompt使用技巧、Transformer架构和预训练、SFT、RLHF等一些基础概念,用最易懂的方式带你入门大模型。

👉②.进阶篇👈
接下来是进阶篇,你将掌握RAG、Agent、Langchain、大模型微调和私有化部署,学习如何构建外挂知识库并和自己的企业相结合,学习如何使用langchain框架提高开发效率和代码质量、学习如何选择合适的基座模型并进行数据集的收集预处理以及具体的模型微调等等。

👉③.实战篇👈
实战篇会手把手带着大家练习企业级的落地项目(已脱敏),比如RAG医疗问答系统、Agent智能电商客服系统、数字人项目实战、教育行业智能助教等等,从而帮助大家更好的应对大模型时代的挑战。

👉④.福利篇👈
最后呢,会给大家一个小福利,课程视频中的所有素材,有搭建AI开发环境资料包,还有学习计划表,几十上百G素材、电子书和课件等等,只要你能想到的素材,我这里几乎都有。我已经全部上传到优快云,朋友们如果需要可以微信扫描下方优快云官方认证二维码免费领取【保证100%免费】
相信我,这套大模型系统教程将会是全网最齐全 最易懂的小白专用课!!

















 443
443

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









