



一、背景
大模型很大,大到一张卡放不下,数据很多,多到一张卡加载会爆。前几年搞的分布式计算的思想用在多GPU上是个很不错的思路,不过两者有很大的差异,这里不西索了。分布式并行有很多中方式,有DP(数据并行)、TP(张量并行)、PP(流水线并行)等。
二、介绍
2.1 数据并行
-
DataParallel(DP):采用的Parameter Server模式,只能单机多卡。在DP中,每个GPU上都拷贝一份完整的模型,每个GPU上处理batch的一部分数据,所有GPU算出来的梯度进行累加后,再传回各GPU用于更新参数(PS架构特性)。DP多采用参数服务器这一编程框架,一般由若个计算Worker和1个梯度聚合Server组成。Server与每个Worker通讯,Worker间并不通讯。因此Server承担了系统所有的通讯压力。基于此DP常用于单机多卡场景。
-
DistributedDataParallel(DDP):采用的All-Reduce模式,可以单机多卡,也可多机多卡。DDP将通讯压力均衡地分到每个GPU上,使得跨机器的数据并行得以高效实现(AR架构特性)。DP和DDP的总通讯量相同,但因负载不均的原因,DP需要耗费更多的时间搬运数据。
-
ZeRO:零冗余优化器。由微软推出并应用于其DeepSpeed框架中。严格来讲ZeRO采用数据并行+张量并行的方式,旨在降低存储。
对比:
-
DP是单进程多线程的,只能在单机上工作;DDP是多进程的,可以在多级多卡上工作。DP通常比DDP慢,主要原因有:1)DP是单进程的,受到GIL的限制;2)DP每个step都需要拷贝模型,以及划分数据和收集输出;
-
DDP可以与模型并行相结合;
-
DP的通信成本随着卡数线性增长,DDP支持Ring-AllReduce,通信成本是固定的。
2.2 张量并行
- TensorParallel(TP): 将计算图中的层内的参数(张量)切分到不同设备(即层内并行),每个设备只拥有模型的一部分,以减少内存负荷,我们称之为张量模型并行。说白了就是对权重矩阵和X进行拆分,按照行和列拆开,然后并行计算。当然,不同层如Liner层,att层的计算方式或者说并行手段不一样,需要有针对性分析。TP也称为层内并行。
2.3 流水线并行
- PipeLineParallel(PP):流水线并行,顾名思义肯定是将模型拆分为前后串起来的流水,当模型太大,一块GPU放不下时,流水线并行将模型的不同层放到不同的GPU上,通过切割mini-batch实现对训练数据的流水线处理,提升GPU计算通讯比。同时通过re-materialization机制降低显存消耗。但在实际应用中,流水线并行并不特别流行,主要原因是模型能否均匀切割,影响了整体计算效率,这就需要去做手调。
三、数据并行(DP)
3.1 流程

计算流程:
- 若干块计算GPU,如图中GPU0~GPU2;其中某块GPU负责收集和下发梯度
- 在每块计算GPU上都拷贝一份完整的模型参数。
- 把一份数据X(例如一个batch)均匀分给不同的计算GPU。
- 每块计算GPU做一轮FWD和BWD后,算得一份梯度G。
- 每块计算GPU将自己的梯度push给梯度收集GPU,做聚合操作。这里的聚合操作一般指梯度累加。当然也支持用户自定义。
- 梯度收集GPU聚合完毕后,计算GPU从它那pull下完整的梯度结果,用于更新模型参数W。更新完毕后,计算GPU上的模型参数依然保持一致。
- 聚合再下发梯度的操作,称为AllReduce。
3.2 优缺点
方便是方便,缺点:存储开销大,通讯开销大
3.3 代码
一个案例代码如下所示
import torch
import torch.nn as nn
import torch.optim as optim
from torch.utils.data import DataLoader, Dataset
# 假设我们有一个简单的数据集类
class SimpleDataset(Dataset):
def __init__(self, data, target):
self.data = data
self.target = target
def __len__(self):
return len(self.data)
def __getitem__(self, idx):
return self.data[idx], self.target[idx]
# 假设我们有一个简单的神经网络模型
class SimpleModel(nn.Module):
def __init__(self, input_dim):
super(SimpleModel, self).__init__()
self.fc = nn.Linear(input_dim, 1)
def forward(self, x):
return torch.sigmoid(self.fc(x))
# 假设我们有一些数据
n_sample = 100
n_dim = 10
batch_size = 10
X = torch.randn(n_sample, n_dim)
Y = torch.randint(0, 2, (n_sample, )).float()
dataset = SimpleDataset(X, Y)
data_loader = DataLoader(dataset, batch_size=batch_size, shuffle=True)
# ===== 注意:刚创建的模型是在 cpu 上的 ===== #
device_ids = [0, 1, 2]
model = SimpleModel(n_dim).to(device_ids[0])
# 重点1:对上面的model再包装
model = nn.DataParallel(model, device_ids=device_ids)
optimizer = optim.SGD(model.parameters(), lr=0.01)
for epoch in range(10):
for batch_idx, (inputs, targets) in enumerate(data_loader):
inputs, targets = inputs.to('cuda'), targets.to('cuda')
outputs = model(inputs)
loss = nn.BCELoss()(outputs, targets.unsqueeze(1))
optimizer.zero_grad()
loss.backward()
optimizer.step()
print(f'Epoch {epoch}, Batch {batch_idx}, Loss: {loss.item()}')
代码来自参考[1],测试过了没有问题,可以正常运行。复制到一个py文件中,然后点击run就可以了。
[1] https://zhuanlan.zhihu.com/p/676142368
四、分布式数据并行(DDP)
4.1 背景
DP一般用于单机多卡场景。因此,DDP作为一种更通用的解决方案出现了,既能多机,也能单机。DDP首先要解决的就是通讯问题:将Server上的通讯压力均衡转到各个Worker上。实现这一点后,可以进一步去Server,留Worker。
前文我们说过,聚合梯度 + 下发梯度这一轮操作,称为AllReduce。接下来我们介绍目前最通用的AllReduce方法:Ring-AllReduce。它由百度最先提出,非常有效地解决了数据并行中通讯负载不均的问题,使得DDP得以实现。
4.2 流程
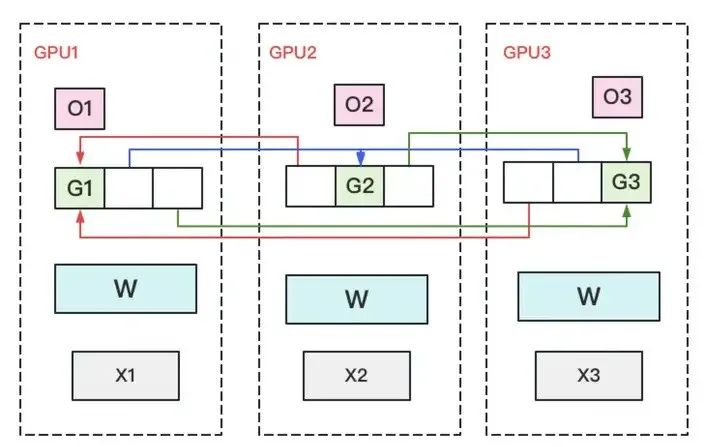
第一步:Reduce-Scatter,定义网络拓扑关系,使得每个GPU只和其相邻的两块GPU通讯。每次发送对应位置的数据进行累加。每一次累加更新都形成一个拓扑环,因此被称为Ring。
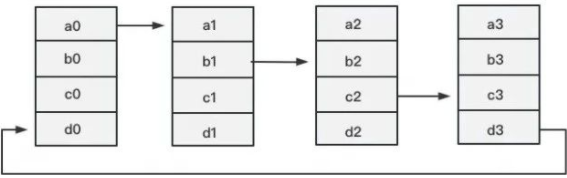
可以看到GPU0和GPU1是连接的,1和2是连接的,这样依次连接形成一个环,上面的a0是的参数梯度,看到每个GPU上有a b c d这4块的梯度,对应的是模型中不同部分参数的梯度吗,所以整体上的梯度是a+b+c+d,就是a0+b0+c0+d0+a1+b1+c1+d1+a2+b2+c2+d2+a3+b3+c3+d3, 每个GPU上会基于当前分到的部分数据更新参数的梯度,更新完了之后就立马传给后面的GPU,比如对于GPU0来说,它分到了1/4的数据,那么咱就基于这1/4的数据更新w0,…,w3的参数,更新的时候更新到w4的梯度后,立马传给GPU1,然后继续更新w3,我们GPU1在GPU0更新w4的时候也不会闲着,它可以更新w3,然后给GPU2,这样类似4个人站好一个队伍,有4块大石头要从0搬到3,那么各个GPU依次搬一点,形成流水线,而不是依次把4块大石头全部搬完过去,那开销也大,也累。
这一步得到的结果如下:
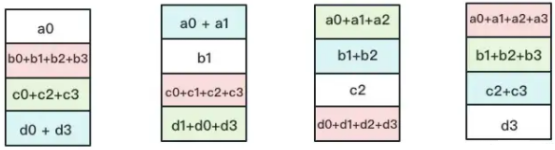
可以看到每一块GPU渡海十上都有一份完整的几次聚合,注意不是所有的梯度。
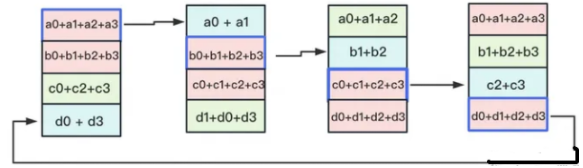
第二步:All-Gather, 就是把红色那部分的梯度广播到其他GPU上去,如名字里Gather所述的一样,这操作里依然按照“相邻GPU对应位置进行通讯”的原则,但对应位置数据不再做相加,而是直接替换。All-Gather以红色块作为起点。
4.3 代码(单机分布式)
代码小的如下:
import torch
import torch.distributed as dist
import torch.nn as nn
import torch.optim as optim
from torch.nn.parallel import DistributedDataParallel as DDP
class DummyModel(nn.Module):
def __init__(self):
super(DummyModel, self).__init__()
self.net1 = nn.Linear(10, 10)
self.net2 = nn.Sequential(nn.Linear(10, 10), nn.LayerNorm(10))
self.net3 = nn.Linear(10, 10)
self.layer_norm = nn.LayerNorm(10)
def forward(self, x):
return self.layer_norm(self.net3(self.net2(self.net1(x))))
def main():
dist.init_process_group("nccl")
rank = dist.get_rank()
if rank == 0:
print(f"local rank: {rank}, world size: {dist.get_world_size()}")
torch.cuda.set_device(rank)
model = DummyModel().to(rank)
ddp_model = DDP(model, device_ids=[rank])
loss_fn = nn.MSELoss()
optimizer = optim.SGD(ddp_model.parameters(), lr=0.001)
for i in range(1000):
outputs = ddp_model(torch.randn(20, 10).to(rank))
labels = torch.randn(20, 10).to(rank)
loss_fn(outputs, labels).backward()
optimizer.step()
if rank == 0 and i % 100 == 0:
print(f"Iteration: {i/1000 * 100} %")
if rank == 0:
print("Training completed.")
if __name__ == '__main__':
main()
# torchrun --nproc_per_node=2 --nnodes=1 --standalone ddp_example.py
记得好好看上面代码中的重点标记,别漏掉了。代码见参考[1],代码写好后,使用 torchrun --nproc_per_node=2 --nnodes=1 --standalone ddp_example2.py --local_rank 0进行启动,别用参考[1]提到的命令,那个命令已经过时了。
4.4 代码(多机分布式)
代码上基本没啥改变,假设我们有两台机器,则启动代码可能要变一下
>>> #节点1
torchrun --nproc_per_node 8 --nnodes 2 --node_rank 0 --rdzv_endpoint 10.192.2.1:62111 ddp_example.py
>>> #节点2
torchrun --nproc_per_node 8 --nnodes 2 --node_rank 1 --rdzv_endpoint 10.192.2.1:62111 ddp_example.py
上面也可以不写rdzv_endpoint而直接指定
--master_addr="192.168.1.1"
--master_port=1234
也是可以的。
其中多机分布式分为两种,一种是每个进程占用一张卡,一种是每个进程占用多张卡。
- 每个进程占用一张卡
注意1. dist.init_process_group里面的rank需要根据node以及GPU的数量计算;2. world_size的大小=节点数 x GPU 数量。3. ddp 里面的device_ids需要指定对应显卡。
假设一共有两台机器(节点1和节点2),每个节点上有8张卡,节点1的IP地址为192.168.0.1 占用的端口22335(端口可以更换),启动的方式如下:
>>> #节点1
>>>python python demo.py --world_size=16 --node_rank=0 --master_addr="192.168.0.1" --master_port=22335
>>> #节点2
>>>python python demo.py --world_size=16 --node_rank=1 --master_addr="192.168.0.1" --master_port=22335
两张GPU有16张卡,因此word_size为16(进程数),就是每张卡由1个进程来控制。
- 每个进程控制多张卡
看单进程多卡的代码和启动方式,代码中需要注意的位置:1. dist.init_process_group里面的rank等于节点编号;2. world_size等于节点的总数量;3. DDP不需要指定device。
启动方式如下:
>>> #节点1
>>>python demo.py --world_size=2 --rank=0 --master_addr="192.168.0.1" --master_port=22335
>>> #节点2
>>>python demo.py --world_size=2 --rank=2 --master_addr="192.168.0.1" --master_port=22335
当然上面是写成了python -m,理论上要写成torchrun才可以。
这一小部分的代码和解释可以看 参考3
4.5 其它
1. 模型保存
让一个rank保存模型就好了,没必要每个rank都要保存,这样太耗时了
if torch.distributed.get_rank() == 0: #一般用0,当然,可以选任意的rank保存。
torch.save(net, "net.pth")
2. 时间开销比较
两者的总通讯量虽然相同,但DP存在负载不均的情况,大部分的通讯压力集中在Server上,而Server的通讯量与GPU数量呈线性关系,导致DP一般适用于单机多卡场景。而DDP通过采用Ring-AllReduce这一NCCL操作,使得通讯量均衡分布到每块GPU上,且该通讯量为一固定常量,不受GPU个数影响,因此可实现跨机器的训练。
4.6 相关概念
这里说一下rank这些东西的概念.
我们可以在cmd里面运行 torchrun -h 查看所有参数的定义
-
rank:用于表示进程的编号/序号(在一些结构图中rank指的是软节点,rank可以看成一个计算单位),每一个进程对应了一个rank的进程,整个分布式由许多rank完成。
-
node:物理节点,可以是一台机器也可以是一个容器,节点内部可以有多个GPU。
-
rank与local_rank:rank是指在整个分布式任务中进程的序号;local_rank是指在一个node上进程的相对序号,local_rank在node之间相互独立。
-
nnodes、node_rank与nproc_per_node:nnodes是指物理节点数量,node_rank是物理节点的序号;nproc_per_node是指每个物理节点上面进程的数量。
-
word size :全局(一个分布式任务)中,rank的数量。
该定义参考[2]. 图解如下所示:

图中:一共有12个rank,nproc_per_node=4,nnodes=3,每个节点都一个对应的node_rank。
通信过程主要是完成模型训练过程中参数信息的传递,主要考虑通信后端和通信模式选择,后端与模式对整个训练的收敛速度影响较大,相差可达2~10倍。 在DDP中支持了几个常见的通信库,而数据处理的模式写在PyTorch底层,供用户选择的主要是后端。在初始化时需要设置:
- backend :通信后端,可选的包括:nccl(NVIDIA推出)、gloo(Facebook推出)、mpi(OpenMPI)。从测试的效果来看,如果显卡支持nccl,建议后端选择nccl,,其它硬件(非N卡)考虑用gloo、mpi(OpenMPI)。
参考
[2] https://zhuanlan.zhihu.com/p/358974461
[3] 找不到了…
[4] https://zhuanlan.zhihu.com/p/358974461
[5] Pytorch 分布式训练DDP(torch.distributed)详解-原理-代码_pytorch ddp-优快云博客 【DDP原理】
五、ZERO数据并行
5.1 思路
首先分析了一波,觉得梯度、优化器、模型参数、数据这些都可以切分,那就干脆放在不同的卡上,用的时候进行通信就可以了,这就是你那通讯来换显存。
5.2 优化状态分割
(1)每块GPU上存一份完整的参数W。将一个batch的数据分成3份,每块GPU各吃一份,做完一轮foward和backward后,各得一份梯度。
(2)对梯度做一次AllReduce,得到完整的梯度G,产生单卡通讯量 2Φ2\Phi 。为了表达简明,这里通讯量我们就不再换算成byte了,而直接根据参数量来计算。
(3)得到完整梯度G,就可以对W做更新。我们知道W的更新由optimizer states和梯度共同决定。由于每块GPU上只保管部分optimizer states,因此只能将相应的W(蓝色部分)进行更新。(2)和(3)可以用下图表示:
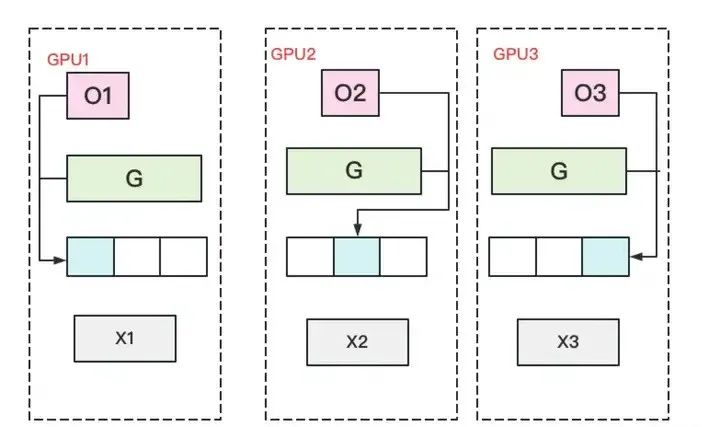
(4)此时,每块GPU上都有部分W没有完成更新(图中白色部分)。所以我们需要对W做一次All-Gather,从别的GPU上把更新好的部分W取回来。
5.3 优化状态与梯度分割
思路是简单的,主要流程如下:
(1)每块GPU上存一份完整的参数W。将一个batch的数据分成3份,每块GPU各吃一份,做完一轮foward和backward后,算得一份完整的梯度(下图中绿色+白色)。
(2)对梯度做一次Reduce-Scatter,保证每个GPU上所维持的那块梯度是聚合梯度。例如对GPU1,它负责维护G1,因此其他的GPU只需要把G1对应位置的梯度发给GPU1做加总就可。汇总完毕后,白色块对GPU无用,可以从显存中移除。单卡通讯量 Φ\Phi 。(1)和(2)见下图:
(3)每块GPU用自己对应的O和G去更新相应的W。更新完毕后,每块GPU维持了一块更新完毕的W。同理,对W做一次All-Gather,将别的GPU算好的W同步到自己这来。单卡通讯量 Φ\Phi
5.4 优化状态、梯度与参数分割
数据并行的流程如下:
(1)每块GPU上只保存部分参数W。将一个batch的数据分成3份,每块GPU各吃一份。
(2)做forward时,对W做一次All-Gather,取回分布在别的GPU上的W,得到一份完整的W,单卡通讯量 Φ\Phi 。forward做完,立刻把不是自己维护的W抛弃。
(3)做backward时,对W做一次All-Gather,取回完整的W,单卡通讯量 Φ\Phi 。backward做完,立刻把不是自己维护的W抛弃。
(4)做完backward,算得一份完整的梯度G,对G做一次Reduce-Scatter,从别的GPU上聚合自己维护的那部分梯度,单卡通讯量 Φ\Phi 。聚合操作结束后,立刻把不是自己维护的G抛弃。
(5)用自己维护的O和G,更新W。由于只维护部分W,因此无需再对W做任何AllReduce操作。
5.5 ZeRO-Offload与ZeRO-Infinity
最后,简单介绍一下ZeRO-Offload。它的核心思想是:显存不够,内存来凑。如果我把要存储的大头卸载(offload)到CPU上,而把计算部分放到GPU上,这样比起跨机,是不是能既降显存,也能减少一些通讯压力呢?
ZeRO-Offload的做法是:
-
forward和backward计算量高,因此和它们相关的部分,例如参数W(fp16),activation,就全放入GPU。
-
update的部分计算量低,因此和它相关的部分,全部放入CPU中。例如W(fp32),optimizer states(fp32)和gradients(fp16)等。
ZeRO-Infinity 则在 ZeRO-Offload 的基础上进一步优化,主要包括三个方面。一是将和 ZeRO 的结合从 ZeRO-2 延伸到了 ZeRO-3,解决了模型参数受限于单张 GPU 内存的问题;二是解决了 ZeRO-Offload 在训练 batch size 较小的时候效率较低的问题;三是除 CPU 内存外,进一步尝试利用 NVMe 的空间。
5.6 总结
从deepspeed提供的zero的启动方式来看,
-
ZeRO的stage-1(优化Optimizer’s State),每个GPU只保存〖自己看管的层〗的优化器状态。每个GPU在更新某层权重时,只需要向〖保管该层〗的GPU要对应的优化器状态即可。
-
ZeRO的stage2(优化Optimizer’s State+Gradient),在stage-1的基础上,每个GPU只负责〖自己看管的层〗的全局梯度(需要收集各个GPU上该层的梯度)即可。
-
ZeRO的stage3(优化Optimizer’s State+Gradient+Parameter),在stage-1和stage-2的基础上,每个GPU负责〖自己管的层〗的FP16权重,每个GPU在Forward和Back-propagation的时候只需要向〖保管该层〗的GPU要对应的模型权重即可。
zero-0就是DDP了
-
从左到右,训练的速度越来越慢
Stage 0 (DDP) > Stage 1 > Stage 2 > Stage 2 + offload > Stage 3 > Stage 3 + offloads -
从左到右,所需GPU显存越来越少
Stage 0 (DDP) < Stage 1 < Stage 2 < Stage 2 + offload < Stage 3 < Stage 3 + offloads
5.7 调试策略
-
batch_size设置为1,通过梯度累积实现任意的有效batch_size -
如果OOM则,设置
--`gradient_checkpointing` 1(HF Trainer),或者model.gradient_checkpointing_enable() -
如果OOM则,尝试ZeRO stage 2
-
如果OOM则,尝试ZeRO stage 2 +
offload_optimizer -
如果OOM则,尝试ZeRO stage 3
-
如果OOM则,尝试offload_param到CPU
-
如果OOM则,尝试offload_optimizer到CPU
-
如果OOM则,尝试降低一些默认参数。比如使用generate时,减小beam search的搜索范围
-
如果OOM则,使用混合精度训练,在Ampere的GPU上使用bf16,在旧版本GPU上使用fp16
-
如果仍然OOM,则使用ZeRO-Infinity ,使用offload_param和offload_optimizer到NVME
-
一旦使用batch_size=1时,没有导致OOM,测量此时的有效吞吐量,然后尽可能增大batch_size
-
开始优化参数,可以关闭offload参数,或者降低ZeRO stage,然后调整batch_size,然后继续测量吞吐量,直到性能比较满意(调参可以增加66%的性能)
参考
[1] https://zhuanlan.zhihu.com/p/618865052
[2] https://zhuanlan.zhihu.com/p/630734624
六、最后分享
AI大模型作为人工智能领域的重要技术突破,正成为推动各行各业创新和转型的关键力量。抓住AI大模型的风口,掌握AI大模型的知识和技能将变得越来越重要。
学习AI大模型是一个系统的过程,需要从基础开始,逐步深入到更高级的技术。
这里给大家精心整理了一份
全面的AI大模型学习资源,包括:AI大模型全套学习路线图(从入门到实战)、精品AI大模型学习书籍手册、视频教程、实战学习、面试题等,资料免费分享!

1. 成长路线图&学习规划
要学习一门新的技术,作为新手一定要先学习成长路线图,方向不对,努力白费。
这里,我们为新手和想要进一步提升的专业人士准备了一份详细的学习成长路线图和规划。可以说是最科学最系统的学习成长路线。

2. 大模型经典PDF书籍
书籍和学习文档资料是学习大模型过程中必不可少的,我们精选了一系列深入探讨大模型技术的书籍和学习文档,它们由领域内的顶尖专家撰写,内容全面、深入、详尽,为你学习大模型提供坚实的理论基础。(书籍含电子版PDF)

3. 大模型视频教程
对于很多自学或者没有基础的同学来说,书籍这些纯文字类的学习教材会觉得比较晦涩难以理解,因此,我们提供了丰富的大模型视频教程,以动态、形象的方式展示技术概念,帮助你更快、更轻松地掌握核心知识。

4. 2024行业报告
行业分析主要包括对不同行业的现状、趋势、问题、机会等进行系统地调研和评估,以了解哪些行业更适合引入大模型的技术和应用,以及在哪些方面可以发挥大模型的优势。

5. 大模型项目实战
学以致用 ,当你的理论知识积累到一定程度,就需要通过项目实战,在实际操作中检验和巩固你所学到的知识,同时为你找工作和职业发展打下坚实的基础。

6. 大模型面试题
面试不仅是技术的较量,更需要充分的准备。
在你已经掌握了大模型技术之后,就需要开始准备面试,我们将提供精心整理的大模型面试题库,涵盖当前面试中可能遇到的各种技术问题,让你在面试中游刃有余。

全套的AI大模型学习资源已经整理打包,有需要的小伙伴可以
微信扫描下方优快云官方认证二维码,免费领取【保证100%免费】


















 756
756

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









