



前言
对于动态规划、有限状态自动机和有向无环图(DAG),这三者之间其实具有非常相似的内核。至少我是这么认为的。接下来,我想做一些简单的感性探讨:
一般来说,动态规划问题可以用递归来解决,这说明这类问题存在最小子问题,也就是说,它们可以被拆解成规模更小的子问题。在解决动态规划问题时,我们通常关注的是状态转移方程,而有限状态自动机正是这种数学表达的执行者。进一步来看,如果我们把它的“行走路径”可视化出来,那它就是一个有向无环图;更具体、更特殊一点,它其实就是一个决策树。
那么,为什么偏偏是有限状态自动机和有向无环图呢?
说它与有限状态自动机内核相同,是因为动态规划的状态转移来源是有限的:有一个起点,以及若干个(但总是可以确定的)可选分支。而有向无环图则是因为整个状态转移过程是不可逆的——我们无法从后续状态反推之前的状态(当然,这个结论可能不一定完全准确)。而且,如果图中存在环,那么自动机就可能会在这个环中“迷路”(一直在这个环上”打转“。因为我们没有对它的路径做限制)。而我们最终想要的状态,一定是图上某个确定的节点。
总而言之,有向无环是为了保证我们最终能得到确定的结果;有限状态自动机则是因为状态来源是有限的。
所以,我们可以这样理解:动态规划是策略,有限状态自动机是执行者,有向无环图是记录者。
在理解这个前提之后,我们就可以开始更具体、更理性的讨论了:
从解决力扣题时总结出的心法切入,引出对更普适计算模型的思考。
本文将通过一个“从生活直觉到理论抽象,再从理论辨析到本质洞察”的独特路径,揭示动态规划(DP)、有限状态机(FSM)与有向无环图(DAG)如何从不同角度描述同一计算过程。
第一章:引入:从基础的DP出发
1.1 起点:实践中的发现
题目很直白,让我们统计爬到顶楼的路径总共有多少。
直接启动逆向思考,总共有n阶,我想要上到第n台阶就有:从n-1阶再走一步,n-2阶再走两步这两部分的办法,而且它们之间相互不重叠。所以直接把它们的方案数相加就能得到上到第n阶的总方案数了。
这样分解问题的方法对上到n-1、n-2级台阶也同样适用。在初始的第零阶(不走,一种方法到达)和第一阶(只走一步,也是一种方法到达)所以:
dp[0]=1
dp[1]=1
dp[i]=dp[i−1]+dp[i−2],i≥2
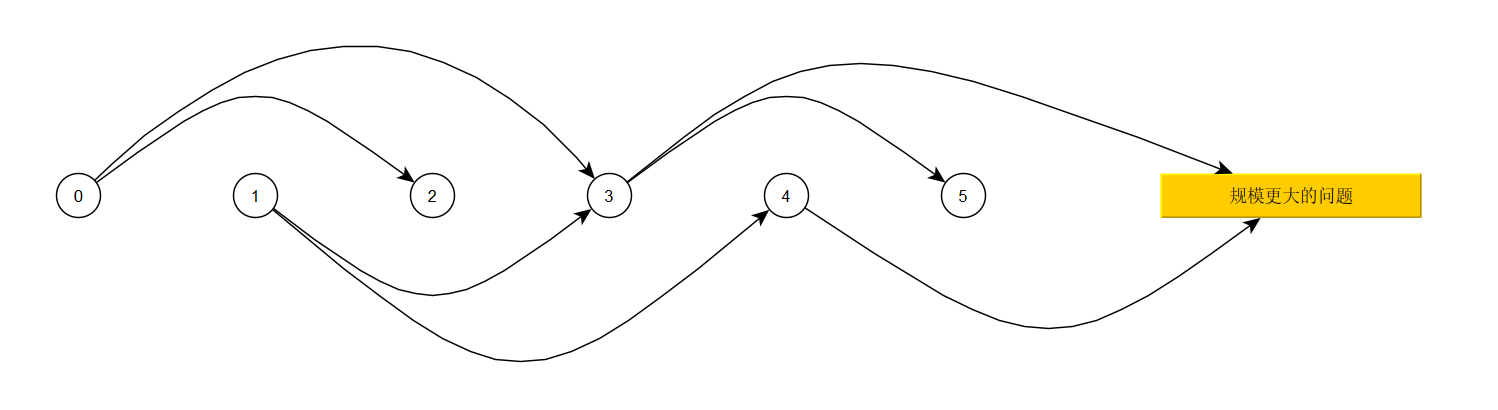
让我们尝试叫个小人来走一下楼梯,看看有多少办法能走到4号节点
从0开始,选择走1或2步,可以到达1或者2;然后是1节点,同样可以选择走一步或者两步到2或3节点,重复这个过程就得到了这样的一个图:
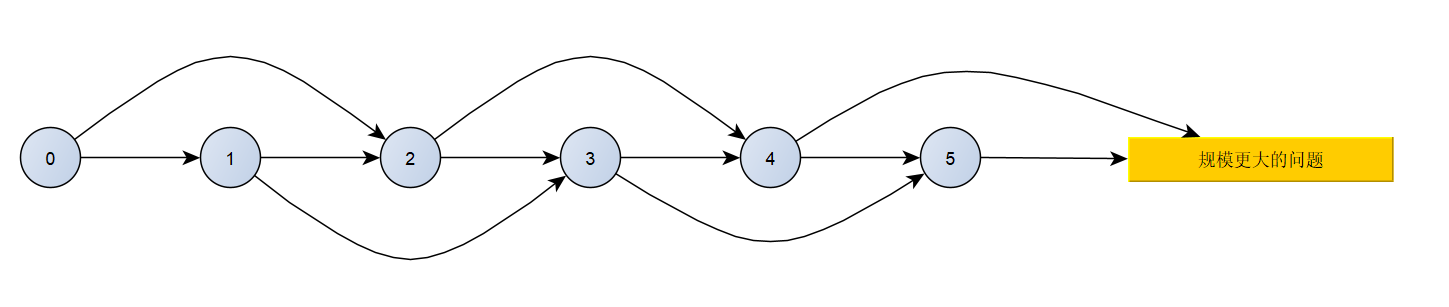 它就是状态转移图了。这样看还不够直观,不能直接数出来想要到达4节点能有多少种办法,于是把它转化成一个更加容易观察的树形结构:
它就是状态转移图了。这样看还不够直观,不能直接数出来想要到达4节点能有多少种办法,于是把它转化成一个更加容易观察的树形结构:
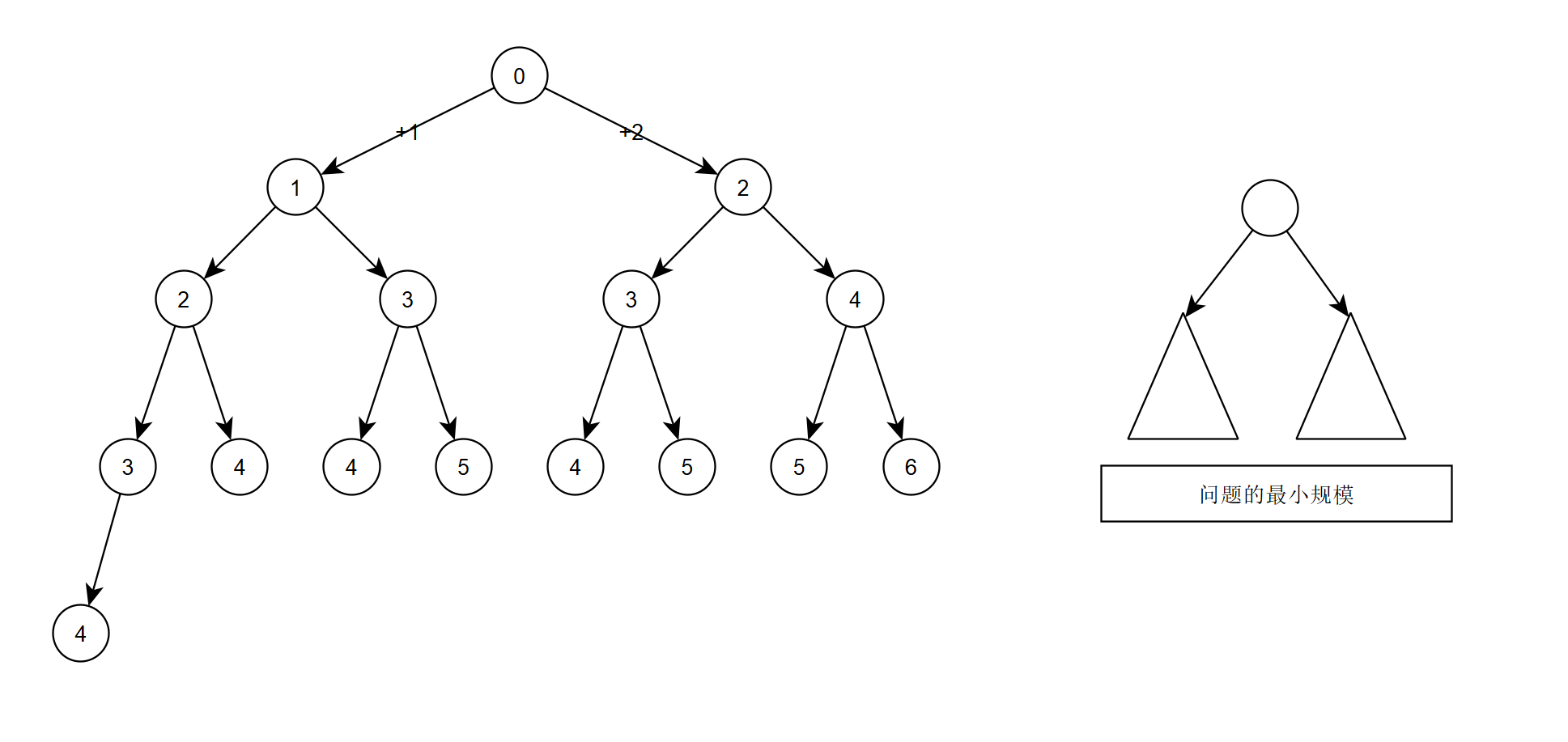
这两个图是逻辑等价的,状态转移图可以看作是这个决策树的重叠子结构的合并
首先理解这个题目的含义。选择了整数nums[i]之后你能获取它的点数,并且把这个元素数学相邻的元素删除:
选择 x:获得 x 的所有副本的总点数(即 x * (x的出现次数))。
代价:不能再选择数学上相邻的 x-1 和 x+1。(选择之后必须至少间隔一次才能进行下次选择)
结合示例,我们能很自然的联想到计数排序,利用这个桶思想来对问题进行转化:计数排序结果数组每个元素乘以它的索引值,这就把它变为一个遍历数组找最优决策值的问题。
转化之后,这两个示例就变成了:
nums = [0,0,2,3,4] 选择idx = 2和idx = 4,sum=2+4
nums = [0,0,4,9,4] 选择idx = 3,sum=9
根据之前对题意的简单理解就有:
// 边界条件
dp[0] = 0 // 没有数字时,点数为0
dp[1] = value[1] // 只有数字1时,点数就是value[1]
// 状态转移方程 (对于 i >= 2)
dp[i] = max(dp[i-1], dp[i-2] + value[i])
那动态规划不就是选与不选和选择哪个的问题么?(至少绝大部分是符合路径累积与最优决策框架的)
//疑问:难道所有可以递归解决的问题都有封闭形式的动态转移方程么?
1.2 探索:一个新世界的轮廓
有限状态自动机就是这样的工具。我们在模拟决策与分析时画出来的那个图就是典型的有向无环图,至此,我们的核心嘉宾就到齐了。“链表是特殊的树,树是特殊的图”决策树就是有向无环图的一个典型。
第二章:基石概念:从生活隐喻到理论定义
2.1 有限状态机:不只是“自动”,更是“触发”
从游戏AI的案例引入:玩过砍怪兽游戏的同学都知道,游戏里的小怪是会巡逻的,当玩家出现在追击范围内,有的小怪会进行攻击行为;如果玩家离开追击范围一段时间(脱战),小怪则会返回巡逻点继续巡逻。那么,我们可以画出这样的概念图:
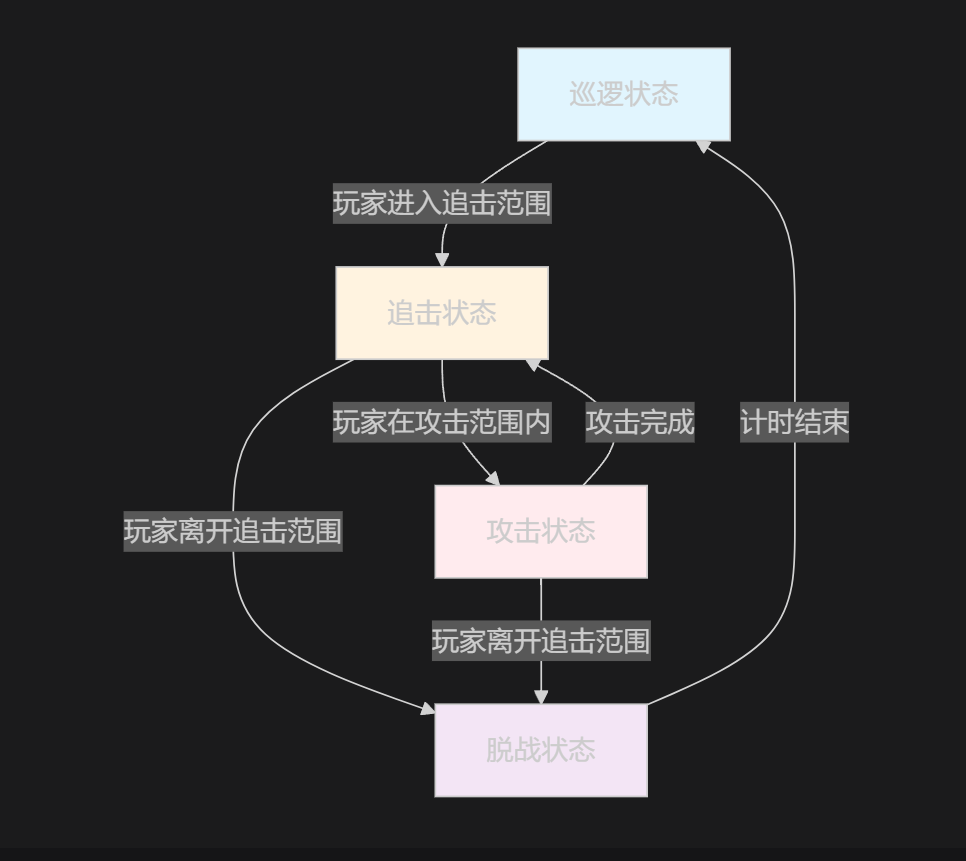 这其中包含了怎样的信息呢?我们拎一条出来看看。首先是初始状态:巡逻状态;玩家进入追击范围,获得一个输入信号,触发自动切换状态——追击状态;攻击到玩家之后,攻击完成,仍在追击范围之内则继续攻击,进入循环——攻击玩家,直到玩家被击败。
这其中包含了怎样的信息呢?我们拎一条出来看看。首先是初始状态:巡逻状态;玩家进入追击范围,获得一个输入信号,触发自动切换状态——追击状态;攻击到玩家之后,攻击完成,仍在追击范围之内则继续攻击,进入循环——攻击玩家,直到玩家被击败。
以下是完整的状态转移表:
| 当前状态 | 输入信号 | 下一状态 | 游戏中的含义 |
|---|---|---|---|
| PATROL | player_in_detection_range | CHASE | 发现玩家,开始追击 |
| CHASE | player_out_chase_range | DISENGAGE | 玩家跑远,准备脱战 |
| CHASE | player_in_attack_range | ATTACK | 进入攻击距离,开始攻击 |
| DISENGAGE | timer_expired | PATROL | 脱战确认,返回巡逻 |
| DISENGAGE | player_in_detection_range | CHASE | 脱战中又发现玩家,继续追击 |
| ATTACK | attack_finished | CHASE | 攻击完成,回到追击状态 |
有限状态自动机,是一个五元组:M = (Q, Σ, δ, q₀, F):
Q 定义了"能做什么"
Σ 定义了"感知到什么"
δ 定义了"如何反应"
q₀ 定义了"起始点"
F 定义了"理想状态"
在这个游戏ai的案例之中:
1. 状态集 Q
Q = {
'PATROL', # 巡逻状态
'CHASE', # 追击状态
'DISENGAGE', # 脱战状态
'ATTACK' # 攻击状态
}
2. 输入字母表 Σ
Σ = {
'player_in_detection_range', # σ₁: 玩家进入侦测范围
'player_out_chase_range', # σ₂: 玩家离开追击范围
'player_in_attack_range', # σ₃: 玩家进入攻击范围
'timer_expired', # σ₄: 脱战计时器到期
'attack_finished' # σ₅: 攻击动作完成
}
3. 状态转移函数 δ
δ = {
# (当前状态, 输入信号) → 下一状态
('PATROL', 'player_in_detection_range'): 'CHASE',
('CHASE', 'player_out_chase_range'): 'DISENGAGE',
('CHASE', 'player_in_attack_range'): 'ATTACK',
('DISENGAGE', 'timer_expired'): 'PATROL',
('DISENGAGE', 'player_in_detection_range'): 'CHASE',
('ATTACK', 'attack_finished'): 'CHASE'
}
4. 初始状态 q₀
q₀ = 'PATROL'
5. 接受状态集 F
F = {'PATROL'}
2.2 有向无环图:计算过程的“时空沙盘”
当我们把爬楼梯问题的状态转移可视化时,得到的正是一个典型的有向无环图(DAG)。这个图不仅仅是一种可视化工具,更是整个计算过程的"时空沙盘"——它同时编码了问题的时间演进和空间结构。还是那张图:
//节点:所有可能的子问题状态
nodes = [0, 1, 2, 3, ..., n]
//边:状态转移的可能性
edges = {
0 → 1 (走1步), 0 → 2 (走2步),
1 → 2 (走1步), 1 → 3 (走2步),
2 → 3 (走1步), 2 → 4 (走2步),
...
}
为什么必须无环?
因为动态规划的核心思想是利用已经解决的子问题。如果图中存在环,比如从状态i能通过某种路径回到状态i,就意味着:
- 计算dp[i]时需要dp[i]本身的值
- 陷入无限递归的悖论
- 破坏了拓扑排序的基础
//疑问:所有DP问题都是无环的吗?
DAG作为"计算蓝图"
这个有向无环图实际上预先描绘了所有可能的计算路径:
- 节点:标记了每个需要计算的子问题
- 边:定义了子问题之间的依赖关系
- 拓扑序:天然给出了正确的计算顺序
2.3 动态规划:在"沙盘"上的"系统化寻优"
心法回顾:
"从小规模案例入手,寻找普遍规律"
让我们重新审视爬楼梯问题的思考流程:
-
最小案例:n=0时,有1种方法(不动);n=1时,有1种方法
-
稍大规模:n=2时,可以从0走2步,或者从1走1步,共2种方法
-
发现模式:n=3时,方法数 = n=2时的方法数 + n=1时的方法数
-
普遍规律:dp[i] = dp[i-1] + dp[i-2]
这种统一性不仅存在于爬楼梯问题,而是贯穿了整个动态规划领域。无论问题表面如何变化,只要它能够被建模为在DAG上的系统化寻优,能够用有限状态自动机来描述其状态演进,那么它就适合用动态规划来解决。
这正是算法设计的美妙之处——在看似不同的问题背后,往往隐藏着相同的计算本质。
第三章:对感性认知的怀疑与粗略讨论
3.1 回顾疑问
//所有适用于递归的问题都能给出封闭形式的状态转移方程么?
3.1.1没有封闭形式状态转移方程的情况
a) 状态空间连续或无限
例如:某些最优控制问题,状态是连续函数,只能写成泛函方程(如 Hamilton–Jacobi–Bellman 方程),不是离散递推。
b) 历史依赖性较强
例如:在递归中如果解依赖于完整的路径历史(而不只是当前状态),那么状态必须包含历史信息,状态空间会指数膨胀,难以写出固定形式的有限项递推。
c) 问题不可分
某些递归问题虽然可以递归分解,但子问题之间互相影响复杂,无法用简单方程表达。
d) 非最优化类递归
例如 Ackermann 函数:
它虽然是递归的,但 不能 写成固定前有限项的递推式,因为它依赖更深层的递归调用。
//难道所有的DP都没有环么?
3.1.2确实存在带有环的动态规划问题,它们突破了经典的DAG模型:
(这里只做简单的讨论)
例1:带负权边的最短路径问题
// 假设:
// vertices 是顶点数
// edges 是边数组,每个元素是 {u, v, weight}
// edge_count 是边的总数
// dist[] 是距离数组,已初始化为 INF,dist[source] = 0
// 核心逻辑:通过|V|-1次松弛操作处理可能的环
for (int i = 1; i <= vertices - 1; i++) {
for (int j = 0; j < edge_count; j++) {
int u = edges[j].u;
int v = edges[j].v;
int weight = edges[j].weight;
if (dist[u] != INF && dist[u] + weight < dist[v]) {
dist[v] = dist[u] + weight; // 可能通过环获得更短路径
}
}
}
环的意义:负权环意味着存在一条可以无限降低成本的路径,这打破了传统DAG的"无环"假设。Bellman-Ford算法通过限定松弛次数来"控制"环的影响,如果第|V|次松弛还能更新,就说明存在负权环。
例2:概率DP中的自环
// 假设:
// states 是状态数
// rewards[] 是即时奖励数组
// gamma 是折扣因子
// transition[][] 是转移概率矩阵
// V[] 是价值函数数组
// V_new[] 是新的价值函数数组
// 状态转移包含自环概率
for (int s = 0; s < states; s++) {
double sum = 0.0;
for (int s_prime = 0; s_prime < states; s_prime++) {
sum += transition[s][s_prime] * V[s_prime];
}
V_new[s] = rewards[s] + gamma * sum;
// 其中 transition[s][s] ≠ 0 就形成了数学自环
}
环的意义:在概率模型中,状态可能以非零概率保持在原地,这在数学上形成了自环。这种环不是bug而是特性,它反映了现实世界中"状态可能不变"的客观规律。求解时我们通过迭代收敛来处理这种循环依赖。
例3:迭代优化算法
// 假设:
// states 是状态数
// actions 是动作数
// gamma 是折扣因子
// rewards[][] 是奖励函数 rewards[s][a]
// transition[][][] 是转移概率 transition[s][a][s_next]
// V[] 是价值函数数组
// 核心的迭代更新过程
while (1) {
double max_diff = 0.0;
for (int s = 0; s < states; s++) {
double best_value = -DBL_MAX;
// max_action[期望收益 + γ * V[下一个状态]]
for (int a = 0; a < actions; a++) {
double expected_value = 0.0;
for (int s_next = 0; s_next < states; s_next++) {
expected_value += transition[s][a][s_next] * V[s_next];
}
double action_value = rewards[s][a] + gamma * expected_value;
if (action_value > best_value) {
best_value = action_value;
}
}
double old_value = V[s];
V[s] = best_value;
double diff = fabs(old_value - V[s]);
if (diff > max_diff) {
max_diff = diff;
}
}
// 检查收敛
if (max_diff < CONVERGENCE_THRESHOLD) {
break;
}
// 在状态图的环中多次迭代直到收敛
}
环的意义:值迭代算法本质上是在状态图的环上"绕圈",每次迭代都利用前一次迭代的结果。这种环不是结构上的缺陷,而是算法收敛的必经之路。
3.2 那么我们的理论破产了吗?——并没有
这些"例外"实际上拓展而非否定了我们的理论框架:
环的处理方式:
-
迭代收敛:通过多次迭代使值函数收敛
-
环检测:识别并特殊处理环的情况
-
概率平滑:在概率DP中,自环通常会导致线性方程组而非递归依赖
理论的适应性:
经典DP理论针对的是确定性、无环的问题
现代DP理论扩展到了随机性、可能含环的问题
但核心思想——利用子问题解构建原问题解——依然保持不变
3.3 重新审视"统一性"的真正含义
我们所说的统一性不是指"所有DP问题都严格符合FSM+DAG",而是指:
思维框架的统一:
- 状态定义的思想
- 状态转移的思维
- 子问题利用的策略
建模方法的统一:
- 即使有环,我们仍然用"状态"来思考问题
- 即使随机,我们仍然用"转移"来描述变化
- 即使迭代,我们仍然用"子问题"来组织计算
结语
动态规划、有限状态机与有向无环图之间的内在统一性,体现在它们共享相同的计算哲学:通过系统的状态演进和子问题组合来解决复杂问题。这种统一性为我们提供了一套强大的思维工具,让我们能够在面对各种优化问题时,找到那条从问题陈述到高效算法的清晰路径。
正如我们在摘要中深刻指出的:"动态规划是策略,有限状态自动机是执行者,有向无环图是记录者"——这三者共同构成了一套完整的计算范式,让我们能够在算法的世界里,既见树木,又见森林。

















 1061
1061

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









