




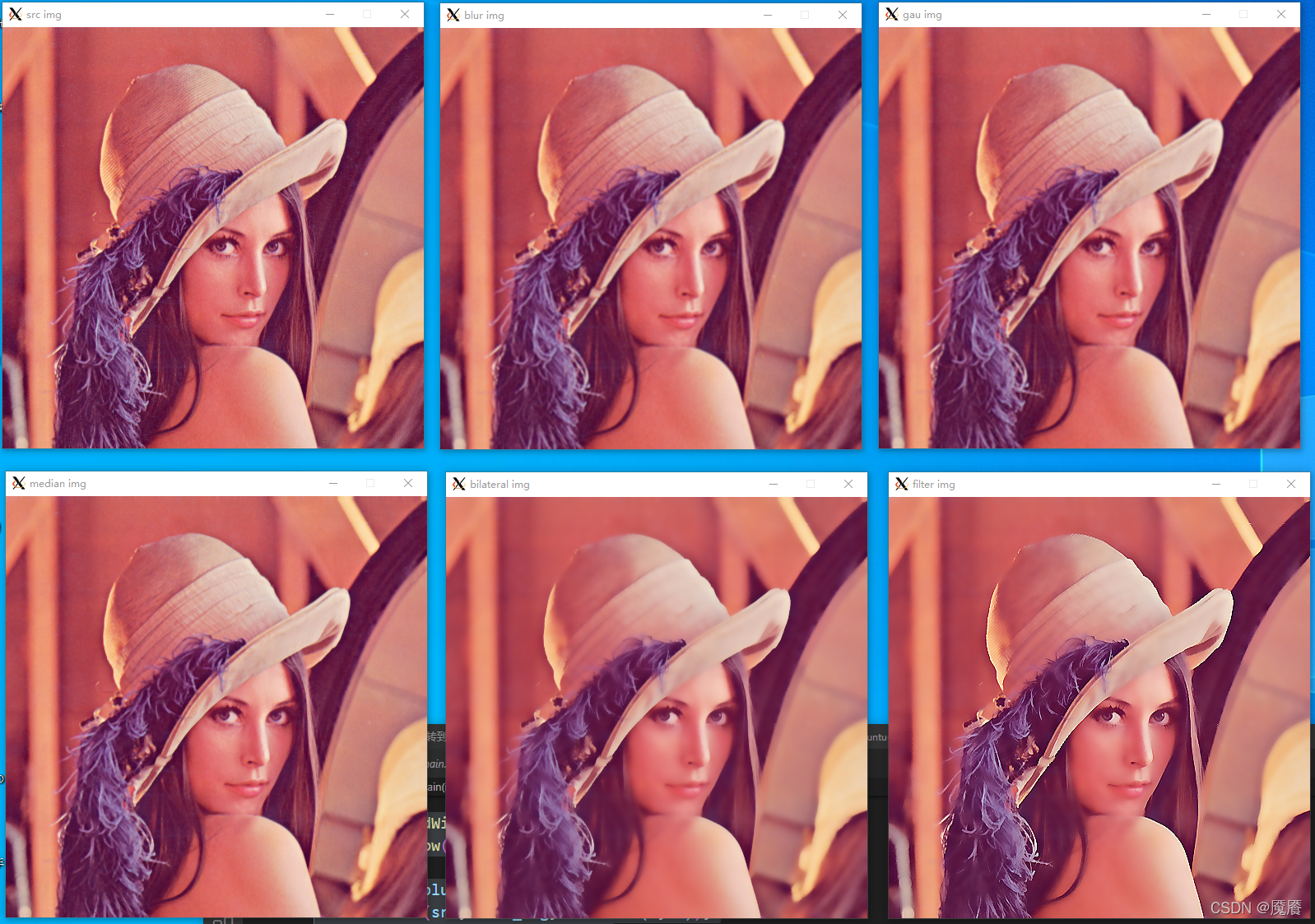
均值模糊无法克服边缘像素信息丢失缺陷。原因是均值滤波是基于平均权重。
高斯模糊部分克服了该缺陷,但是无法完全避免,因为没有考虑像素值的不同。
高斯双边模糊-是边缘保留的滤波方法,避免了边缘信息丢失,保留了图像轮廓不变。
#include <opencv2/opencv.hpp>
#include <iostream>
int main(int argc, char** agrv){
cv::Mat src = cv::imread("../../source/lena.png");
if(src.empty()){
std::cout << "could not load image..." << std::endl;
return -1;
}
cv::namedWindow("src img");
cv::imshow("src img", src);
cv::Mat blur_img;
cv::blur(src, blur_img, cv::Size(3, 3));
cv::namedWindow("blur img");
cv::imshow("blur img", blur_img);
cv::Mat gau_img;
cv::GaussianBlur(src, gau_img, cv::Size(3, 3), 3);
cv::namedWindow("gau img");
cv::imshow("gau img", gau_img);
cv::Mat median_img;
cv::medianBlur(src, median_img, 3);
cv::namedWindow("median img");
cv::imshow("median img", median_img);
cv::Mat bilateral_img;
cv::bilateralFilter(src, bilateral_img, 15, 100, 3);
cv::namedWindow("bilateral img");
cv::imshow("bilateral img", bilateral_img);
cv::Mat filter_img;
cv::Mat kernel = (cv::Mat_<int>(3, 3) << 0, -1, 0, -1, 5, -1, 0, -1, 0);
cv::filter2D(bilateral_img, filter_img, -1, kernel);
cv::namedWindow("filter img");
cv::imshow("filter img", filter_img);
cv::waitKey();
}

















 869
869

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









