










 本文介绍如何使用Unity实现物体移动,包括通过按键控制和虚拟轴控制两种方式。首先创建3D圆柱物体,接着编写MoveC#脚本,最后将脚本拖到物体上完成移动功能。
本文介绍如何使用Unity实现物体移动,包括通过按键控制和虚拟轴控制两种方式。首先创建3D圆柱物体,接着编写MoveC#脚本,最后将脚本拖到物体上完成移动功能。
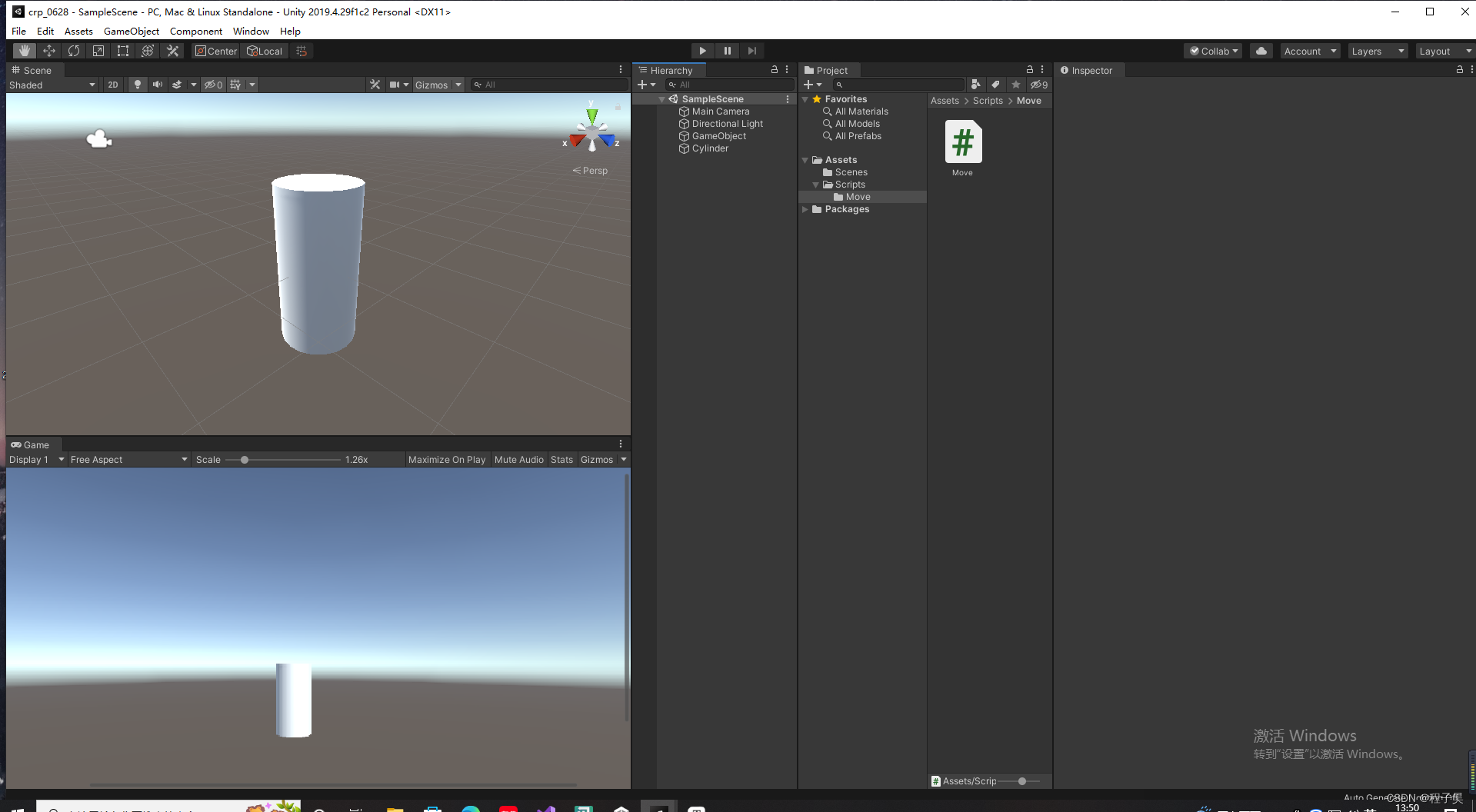
这是我们Unity的主界面
分为五个板块
Scene:场景视图
Game:游戏试图
Hierarchy:层级试图
Project:项目管理试图
Inspector:检查试图
第一节课:实现物体移动脚本
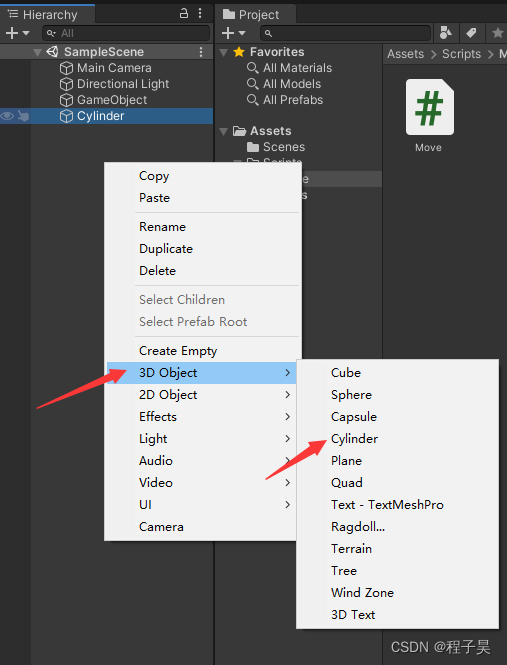
在Hierarchy右键创建一个3D 圆柱物体:Cylinder
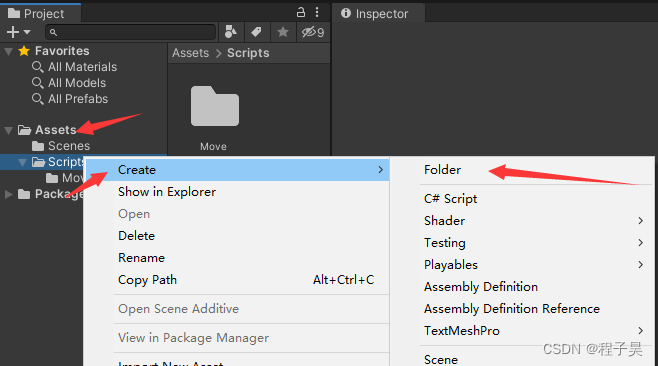
在Project的Assets下右键创建一个脚本文件夹:Scripts
在Scripts下创建一个Move文件夹
在Move文件夹下创建一个Move C#脚本
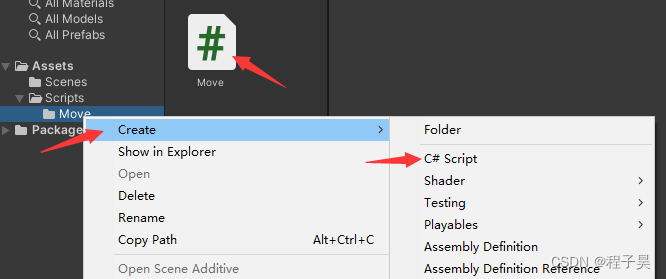
让我们双击进入来编写 移动脚本
第一种:我们可以通过按键来控制移动
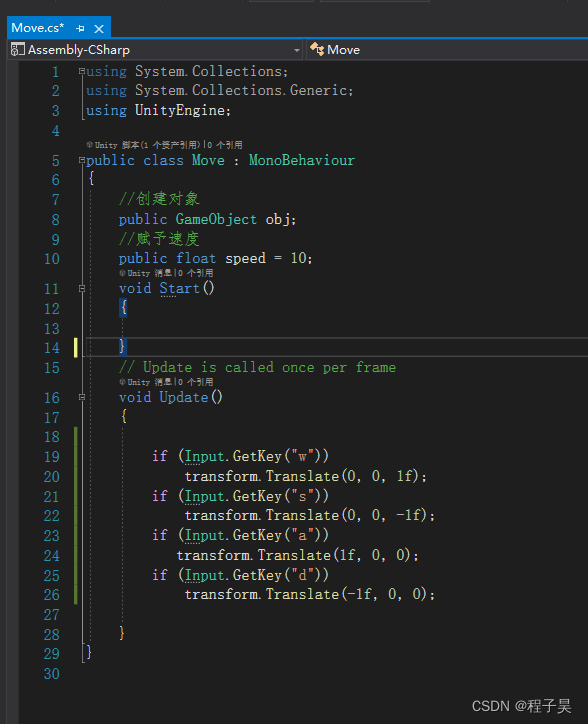
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
public class Move : MonoBehaviour
{
//创建对象
public GameObject obj;
//赋予速度
public float speed = 10;
void Start()
{
}
// Update is called once per frame
void Update()
{
if (Input.GetKey("w"))
transform.Translate(0, 0, 1f);
if (Input.GetKey("s"))
transform.Translate(0, 0, -1f);
if (Input.GetKey("a"))
transform.Translate(1f, 0, 0);
if (Input.GetKey("d"))
transform.Translate(-1f, 0, 0);
}
}
第二种:我们可以通过虚拟轴来控制移动
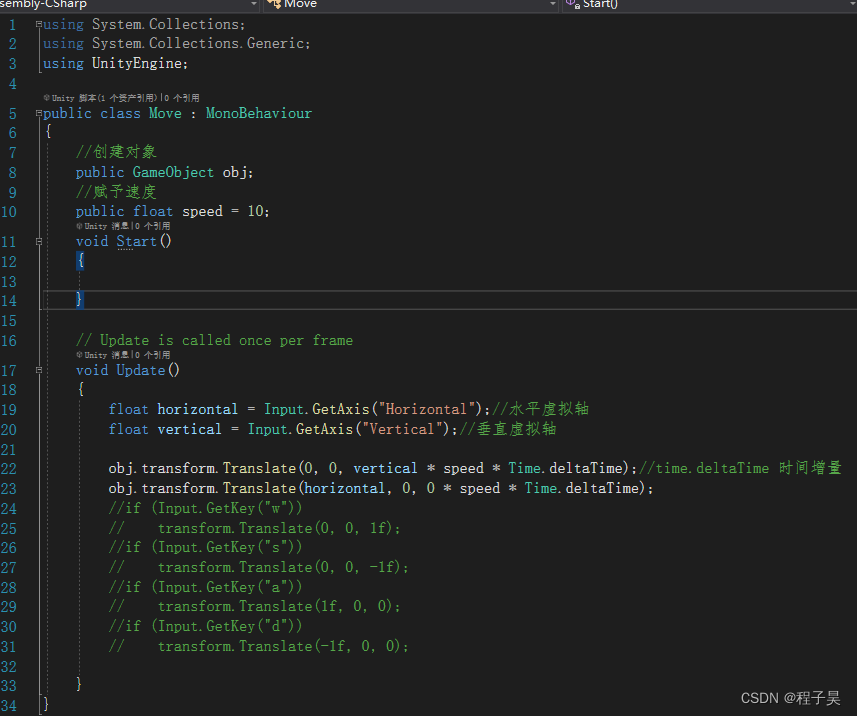
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
public class Move : MonoBehaviour
{
//创建对象
public GameObject obj;
//赋予速度
public float speed = 10;
void Start()
{
}
// Update is called once per frame
void Update()
{
float horizontal = Input.GetAxis("Horizontal");//水平虚拟轴
float vertical = Input.GetAxis("Vertical");//垂直虚拟轴
obj.transform.Translate(0, 0, vertical * speed * Time.deltaTime);//time.deltaTime 时间增量
obj.transform.Translate(horizontal, 0, 0 * speed * Time.deltaTime);
//if (Input.GetKey("w"))
// transform.Translate(0, 0, 1f);
//if (Input.GetKey("s"))
// transform.Translate(0, 0, -1f);
//if (Input.GetKey("a"))
// transform.Translate(1f, 0, 0);
//if (Input.GetKey("d"))
// transform.Translate(-1f, 0, 0);
}
这两种都可以实现物体的移动。
然后我们将脚本拖到物体上
我们就实现物体的移动啦!

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









