



 本文介绍了提高财务税务知识的两种主要途径——考证和实习。建议考取如初级会计、注册会计师等证书,并详细阐述了备考方法,强调了学习的系统性和实践性。同时,实习能将理论知识应用于实际工作中,通过工作中的学习和经验积累,进一步提升财务税务能力。
本文介绍了提高财务税务知识的两种主要途径——考证和实习。建议考取如初级会计、注册会计师等证书,并详细阐述了备考方法,强调了学习的系统性和实践性。同时,实习能将理论知识应用于实际工作中,通过工作中的学习和经验积累,进一步提升财务税务能力。
想掌握一门知识跟技能,无非两个途径。学习与反复实践,对于问题如何快速提高自己的财务税务知识,也就对应上了考证和实习有关的工作。
**
一、考证
**
考哪些证书呢?以下这些包括但不限于初级会计、中级会计、高级会计、注册会计师(CPA)、注册税务师、注册资产评估师、国际注册会计(ACCA)等等证书都是和财务税务直接相关的知识。
有些证书是需要一些学历和工作经验要求,有些报考门槛则较低,读者自行去了解。考证必然要付出不少的精力去学习储备有关知识,这也就给了我们学习财务税务知识方向和动力。
同时,考不同的证书也是一种模块化学习的过程,比盲目自学有效率的多。在以后的工作中,事业单位用人自然也要看你的“含金量”。
接下来是我本人一些关于通过考证来提高自身财务税务知识的方法,但并不快速,只能说更有效率。
因为想要牢牢掌握一门知识,从来就没有捷径。比如考初级会计这种入门必考证书,这个证书具有国家教育部门认可的高中毕业及以上学历即可。
如果是本科生在读的话,建议在大三前就可以考掉,因为这个证书考的《初级会计实务》和《经济法基础》难度不大,只有下了功夫准备,基本都能过。
再者这个证书无特殊情况每年只开考一次,需要两门成绩均合格才算通过。首先买好全国会计专业技术资格考试教辅资料,一般会免费附赠有全程跟班学习视频。如果没有,也可以去某站自行搜索视频进行学习。
学习注重细节,学习财务和会计以及税务的人丝毫马虎不得。谨慎性是会计里面很重要的一个原则。
学习注重内化,财务和税务的知识繁琐多样,注重自行内化。不需要一次性摄入太多,反复内化再觅新。
学习注重联系知识,脑子里要有关联其知识之间的架构,不然零散的知识怎么也记不牢。
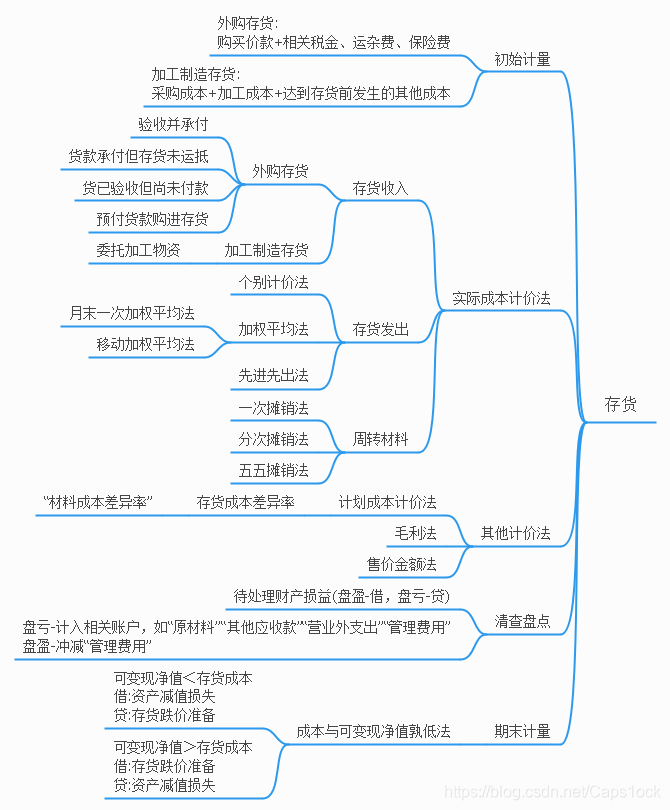
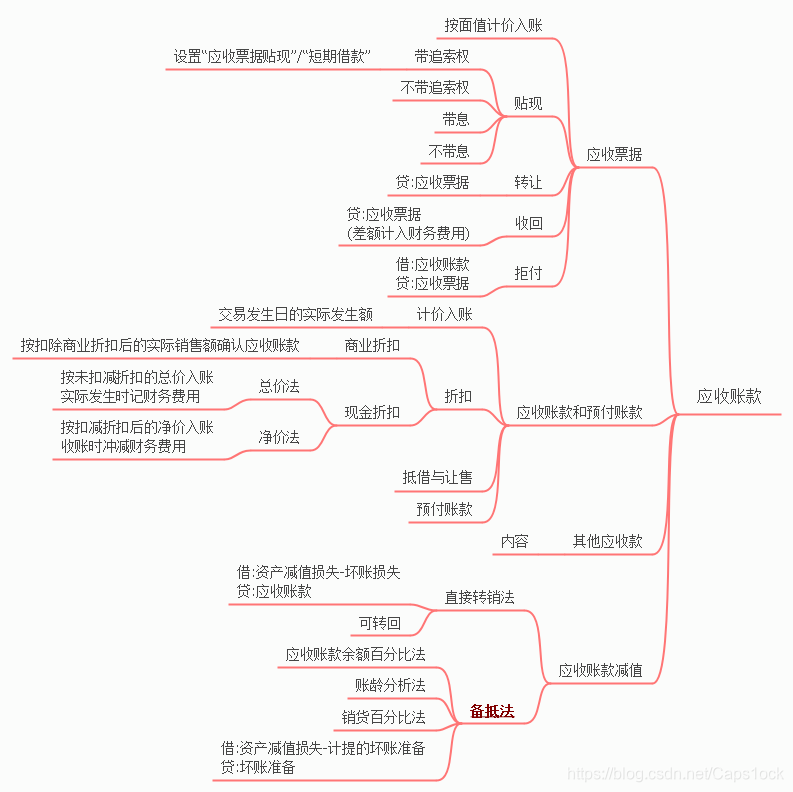
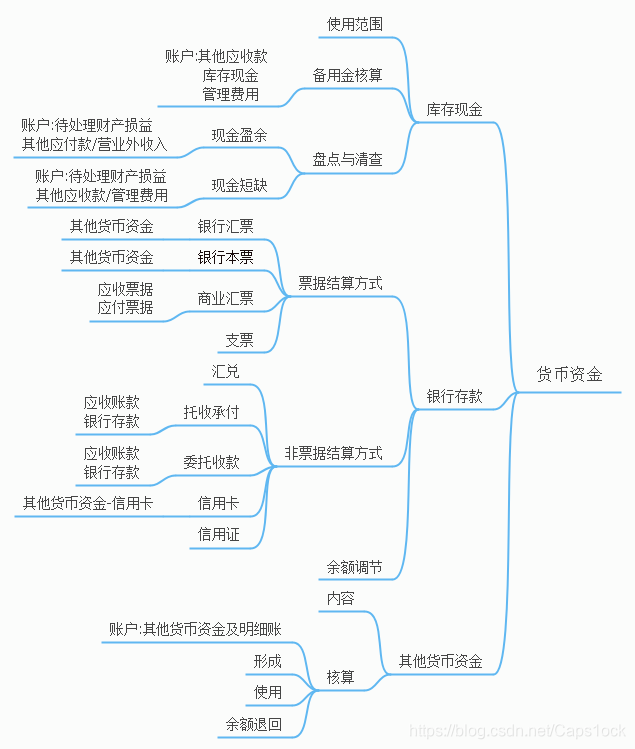
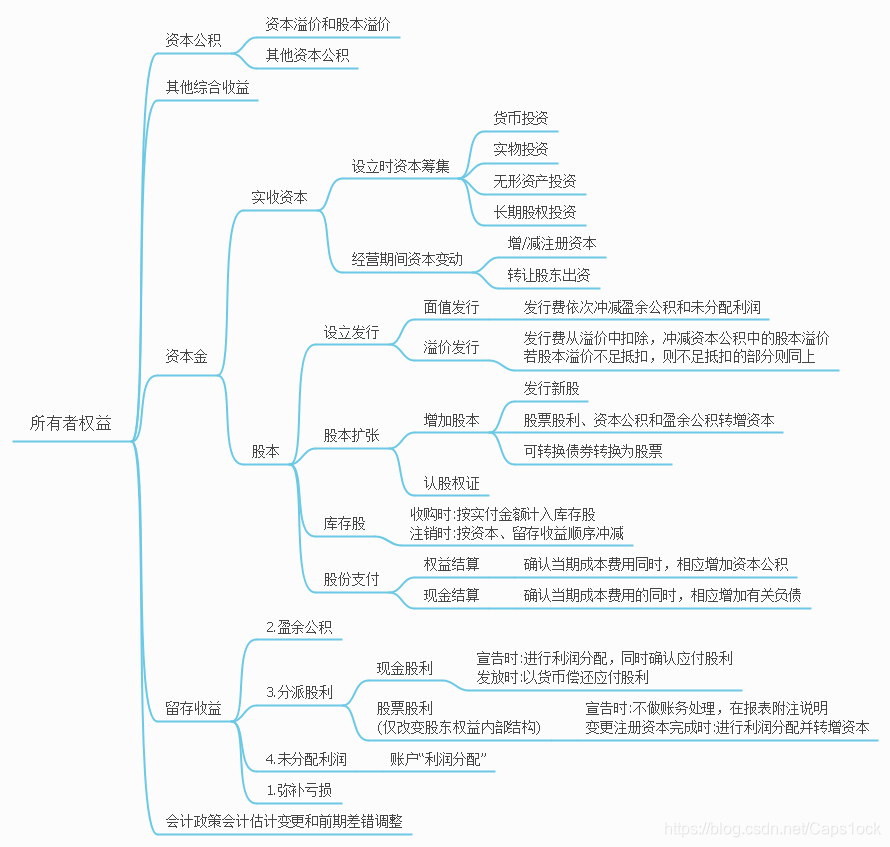
可以在视频或者跟班学习后,自己组建知识思维导图,方便理解复习以至内化,平时我习惯用Mindmaster。
以下是我做的一些思维导图供大家参考一下。
在云端的思维导图供我随时查看和分享。
并且在Mindmaster的导图社区还有很多志同道合的财务小伙伴,大家也会分享自己的思维导图,有需要的小伙伴可以自行去导图社区搜索哦~

二、实习相关工作
“实践是检验真理的唯一标准”,只有工作之后,你才会发现知识和现实的连接点。
知道自己有哪些知识盲区,有些知识也是只有实践之后才懂得的。财务税务的知识一直在为适应社会的发展而在不断更新,所以在实习中我们更能接触到最新的知识。
进工作单位,接触到的知识只会越来越广,所以此时你自然而然需要提高自己的财务税务知识。
进工作单位,熟悉工作流程,一般会有前辈带你,一定要多听多记多问,因为他们的工作经验十分珍贵。
进到工作单位,继续学习行业最新知识是你能否干得好的关键。所以,接触社会之后你会更加主动接近知识,因为你需要知识来支撑你的工作,在大氛围下,财务税务知识自然也能得到不小的提升。

















 6623
6623

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









