




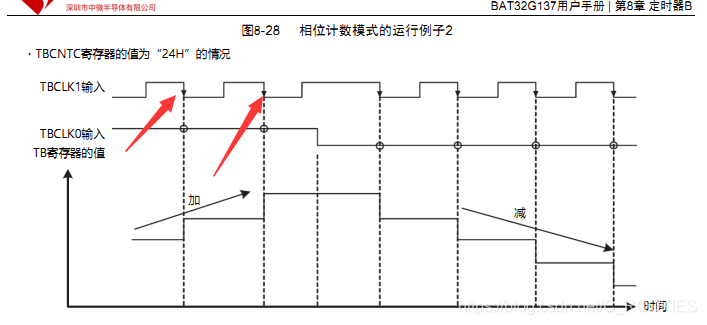
功能四:相位计数模式
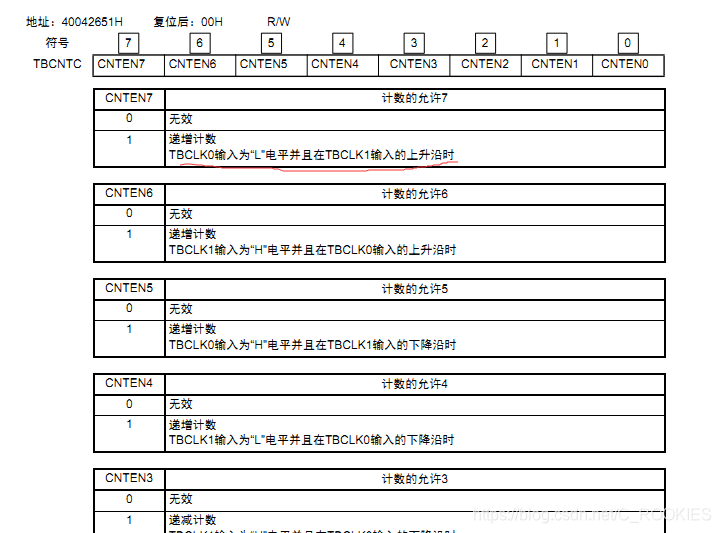
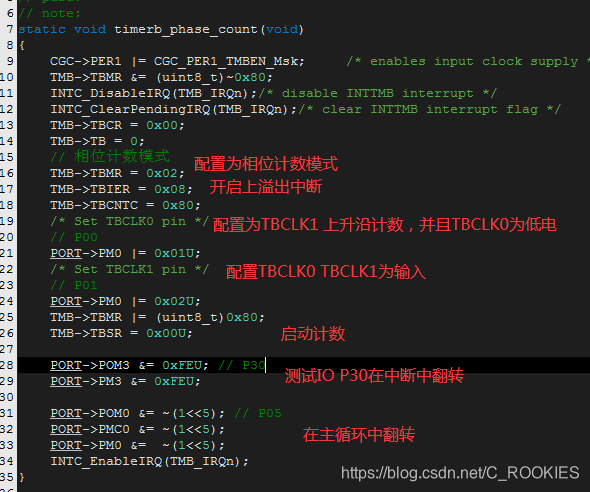
其实就是捕获外部信号波形,TBCLK0 TBCLK1,组合起来。定时器B对把外部信号作为时钟来计数,根据不同的配置实现计数递增还是递减。边沿可以任意选择。
硬件上 P05 连接到P01.
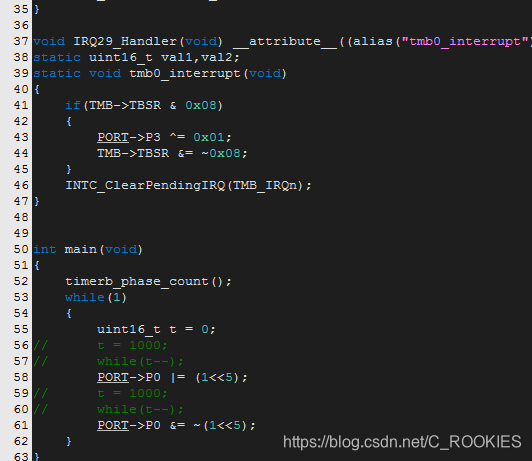
实际计算波形 P05大概是728ns。
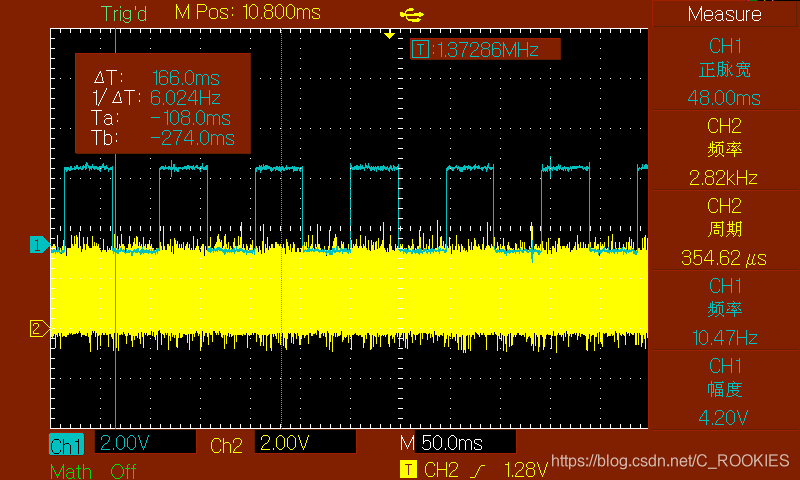
728ns * 65535 = 47.7ms。如图基本上是48ms.
本功能可以方便实现对编码器数据的读写,类似一些红外定位,不用CPU去轮训,直接可以准确检测到脉冲值,正序反序都能计算出来。
 本文介绍了相位计数模式的工作原理,通过将外部信号作为时钟源进行计数,可实现信号波形的精确捕获。此模式适用于编码器数据读写,能准确检测脉冲值并计算正反序,无需CPU轮询,提高效率。
本文介绍了相位计数模式的工作原理,通过将外部信号作为时钟源进行计数,可实现信号波形的精确捕获。此模式适用于编码器数据读写,能准确检测脉冲值并计算正反序,无需CPU轮询,提高效率。
功能四:相位计数模式
其实就是捕获外部信号波形,TBCLK0 TBCLK1,组合起来。定时器B对把外部信号作为时钟来计数,根据不同的配置实现计数递增还是递减。边沿可以任意选择。
硬件上 P05 连接到P01.
实际计算波形 P05大概是728ns。
728ns * 65535 = 47.7ms。如图基本上是48ms.
本功能可以方便实现对编码器数据的读写,类似一些红外定位,不用CPU去轮训,直接可以准确检测到脉冲值,正序反序都能计算出来。

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





















 433
433





