



在机器人系统不断迈向真实世界的进程中,感知系统的稳定性、鲁棒性与泛化能力正成为制约其部署能力的关键因素。面对动态人群、恶劣天气、传感器故障、跨平台部署等复杂环境条件,传统感知算法往往面临性能大幅下降的挑战。
为此,RoboSense Challenge 2025 应运而生。该挑战赛旨在系统性评估机器人在真实场景下的感知与理解能力,推动多模态感知模型的稳健性研究,鼓励跨模态融合与任务泛化方向的创新探索。
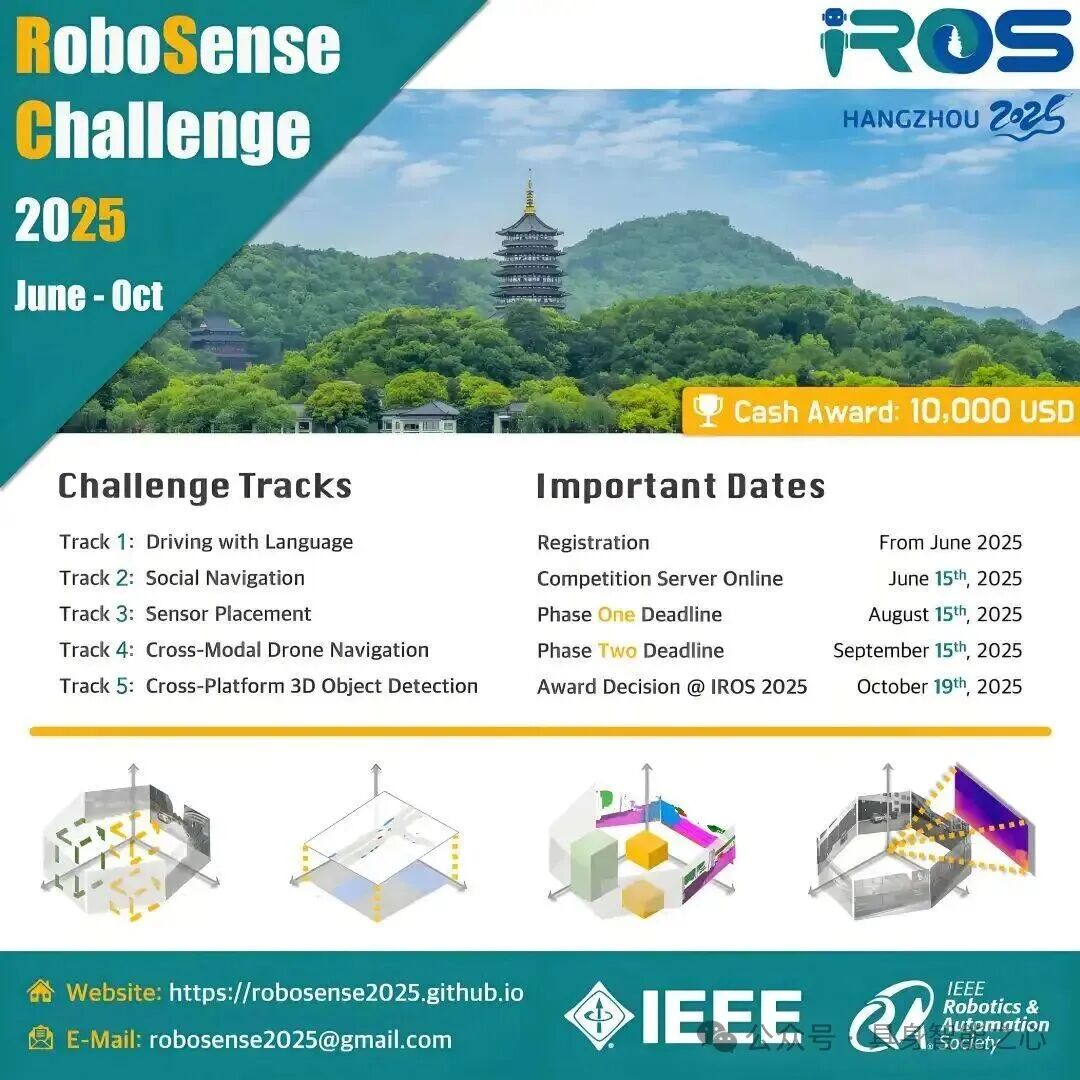
该赛事由新加坡国立大学、南洋理工大学、香港科技大学、香港科技大学(广州)、密歇根大学机器人研究院、加州大学欧文分校、上海人工智能实验室等多家研究机构联合主办,并作为 IROS 2025 官方认证竞赛项目,于大会期间在中国杭州线下展示与颁奖。
让机器人不再“莽撞”,学会“察言观色”、“绕道避人”,真正融入人类生活空间,是具备“社交智能”的自主导航机器人的终极目标,也是本次挑战赛第二赛道的重要任务!
🎯 赛道目标:
打造“社交智能”的自主导航机器人
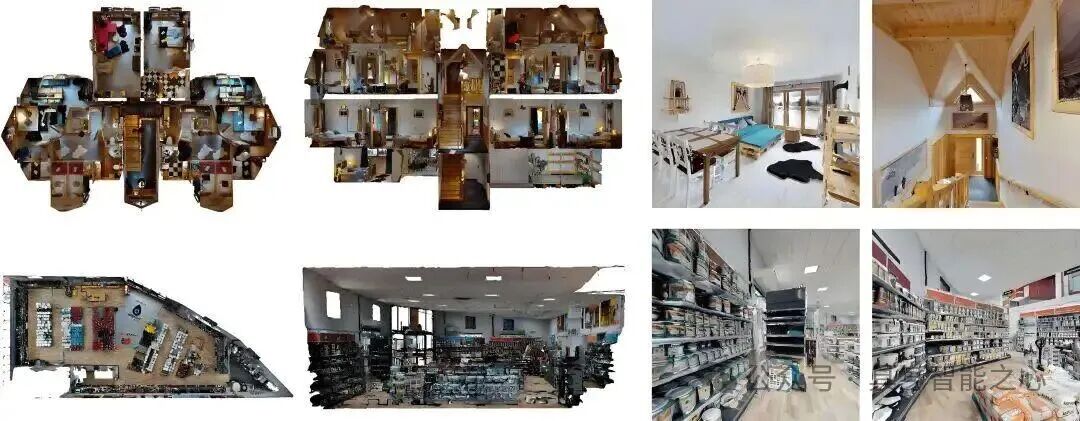
此赛道聚焦于开发基于 RGBD视觉+里程计 的感知与导航系统,要求机器人在无地图、无特权信息的前提下,在动态室内环境中(如住宅、办公室、商场)安全、高效、且符合社会规范地穿行于行人之间。
1
任务目标:
实现一个基于 RGB-D 输入的移动机器人导航模型,使其在不影响人类行为的情况下完成目标导航任务,并符合人类的社会行为规范。
2
挑战难点:
动态行为建模:如何从视觉输入中提取人类轨迹趋势、意图与互动潜力;
社交规则编码:如“避让老人”、“不从人群中央穿行”、“与人保持安全距离”等非显式规则如何被编码进策略模型;
不确定性处理:面对路径冲突、遮挡变化、多主体聚散等不可预测性因素,需引入轨迹分布预测与多解融合机制;
评测维度:除了成功率(Success Rate)与路径效率(SPL),还包括路径社会性指标 PSC(Proxemic Social Compliance)与碰撞统计 H-Coll。
3
推荐方向:
使用 Transformer-based 社交轨迹预测模块;
引入行为分类器进行风险区域判断;
多主体地图编码与图神经网络对多目标的结构建模。
具身智能之心本次倾情赞助该挑战赛,并会在现场为优胜者颁奖!
同时,10月21日上午,具身智能之心将会在现场来一场直播,带大家云逛IROS2025!

此外,具身智能之心联合Abaka AI,为优秀IROSer们提供一场别开生面的after party。一次性和学术、创业、出海、投资领域的大佬聊个够!
🧠 学术天团:
想结识IROS那些让人醍醐灌顶的paper作者与科研大神?这里通通有
🤖 创业天团:
从大脑算法到本体控制,从系统架构到落地实战的具身智能实干家
🌍 出海天团:
硅谷极客与美东大佬,亚洲小龙与欧洲巨鳄,全球AI是星辰大海
💸 投资天团:
专注布局具身AI赛道,正在寻找技术风口与商业密码的资本侦探
【报名指南】
扫码直达派对入口
10月20日24:00前完成登记(手慢无!)
报名链接:https://luma.com/8gu1yt2d名额有限,资料越详细越容易通过审核哦
10.10-10.21期间会通过短信/微信发送邀请函,记得保持网络通畅!

















 1079
1079

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









