




5月19至23日,IEEE国际机器人与自动化大会(ICRA 2025)在美国亚特兰大召开,参会人数超过7000人。ICRA 由电气电子工程师学会(IEEE)机器人与自动化学会(RAS)主办,自 1984 年开始每年举办一次。
ICRA在谷歌学术指标(Google Scholar Metrics,GSM)中常年位居机器人学刊物影响力评定第一,每年汇聚来自世界各地最前沿的研发精英和学术先锋,就机器人与具身智能的前沿技术和未来趋势碰撞思想、共话未来,无论是会议规模和学术地位上,ICRA都可以被称之为机器人自动化领域的顶级学术会议。
今年,戴盟机器人携新品全球首款多维高分辨率高频率视触觉传感器DM-Tac W、多维触觉感知五指灵巧手DM-Hand1参展ICRA,首次亮相海外,获学术界与产业界的双重关注。
戴盟双骄DM TAC-W、DM Hand1首次出征海外告捷!
ICRA戴盟的展位上,分别设置了DM-Tac W、DM-Hand1的互动体验区,大批观众纷纷围观。同时,这两款产品的凭借出色表现斩获了海外订单,实现中国视触觉产品首次规模化出海,标志着“中国智造”在国际市场的新突破。
来看它们现场的精彩表现!
愤怒的小鸟通关神器竟然是它!
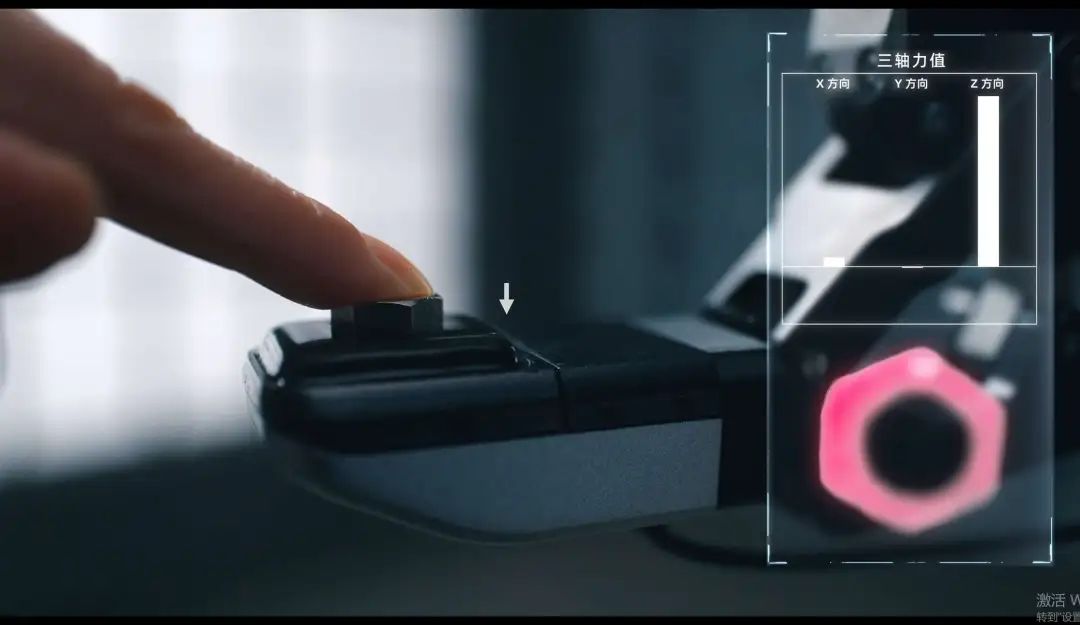
ICRA展台上,有观众在用一个不足手掌大小的方块装置操控游戏“愤怒的小鸟”,观众通过按压接触面,改变不同位置的正压力和切向力,精准操控小鸟的运动轨迹,从而顺利通关。

这款方块装置就是DM-Tac W。作为全球首款多维高分辨率高频率视触觉传感器,DM-Tac W称得上是戴盟的旗舰产品。它创新性地将摄像头集成至传感器内部,当物体接触传感器表面时,实时捕捉密闭光场中的形变特征并结合原创解析算法解算光场变化,实现稳定鲁棒的稠密触觉感知能力。
DM-TAC W每平方厘米覆盖4万个感知单元,远超当前最密集的阵列式触觉传感器,可捕捉物体接触时的形貌、纹理、软硬、滑移、按压力、切向力等多种模态信息,为夹爪等执行末端赋予类人触觉能力,获学术界与产业界双重关注。愤怒的小鸟游戏也进一步直观地展示了DM-Tac W的高分辨率、高频率、多模态等技术优势。
指尖方寸,高难度任务也可得心应手
同时,DM-Hand1也收获了广泛关注。作为一款类人手部结构的新型末端执行器,DM-Hand1具有丰富的自由度,结合力位混合控制算法,可模拟人手实现精准的抓取操作。
DM-Hand1还有一大亮点,就是采用了戴盟全球首款毫米级厚度的视触觉传感器。戴盟突破性地将毫米级的视触觉传感器部署在灵巧手指尖,极大地降低了手指厚度,提高了机器人的灵活性和适应性。得益于丰富的多模态触觉信息感知能力,DM-Hand1可赋能机器人完成自适应抓握力控制、易碎易损件柔顺操控、精密零部件装配等高难度任务。



独创视触觉技术路线,开创国内商业化先河
现阶段,在工业制造场景中,前端工序已实现高度自动化,后端异形零件装配仍严重依赖人工。普通工人经短期培训即可胜任的工作,对机器人却是巨大的挑战。机器人真正落地应用场景,关键在于灵巧操作能力。
而机器人的灵巧操作中,触觉又是至关重要的。人类可以轻松完成拧螺丝、拧瓶盖等操作,这得益于双手敏锐的触觉、力觉反馈和手指形变等感知信息,但没有触觉感知的机器人,不仅操作速度缓慢,更难以完成精细、复杂的任务。
因此,戴盟在研发人形机器人之初,便将触觉传感器确立为最重要的产品开发,从港科大科研团队到如今,已历经8年时间。缘起于戴盟首席科学家与联合创始人王煜教授与师弟——麻省理工学院(MIT)的Alberto Rodriguez教授为期6年的科研合作,在王煜教授的带领下,戴盟团队独创了全新的视触觉传感器技术路线。
区别于MIT的GelSight技术方案中常见采用的三色光技术原理,戴盟成功开辟了基于单色光的图案追踪原理的技术路线,攻克了视触觉传感器算力要求高、发热量大、耐用性差等难题,在全球范围内的机器人及具身智能领域走出属于自己的路线。
不仅如此,戴盟还突破性地将传感器厚度减少到毫米级别,正在推动“全球最薄”视触觉传感器的产业化,并由此开创了国内视触觉产品商业化先河。基于视触觉传感与机器人操作领域的积累与成果,增强了戴盟推进具身智能产业化落地与变革的决心。
展望未来,戴盟将继续携手全球科研伙伴,以强大的产品矩阵和前瞻战略,赋能具身智能产业,共同推动具身智能多场景应用落地,引领机器人产业创新升级。

















 2090
2090

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









