



点击下方卡片,关注“自动驾驶之心”公众号
戳我-> 领取自动驾驶近15个方向学习路线
今天自动驾驶之心为大家分享清华大学AAAI 2025中稿的最新工作—LiON。合成数据助力自驾点云异常检测新SOTA!如果您有相关工作需要分享,请在文末联系我们!
自动驾驶课程学习与技术交流群事宜,也欢迎添加小助理微信AIDriver004做进一步咨询
论文作者 | Shaocong Xu等
编辑 | 自动驾驶之心
论文信息
论文题目:LiON: Learning Point-wise Abstaining Penalty for LiDAR Outlier DetectioN Using Diverse Synthetic Data
论文发表单位:清华大学, 厦门大学,滴滴出行, 香港中文大学-深圳
论文地址:https://arxiv.org/abs/2309.10230
项目仓库:https://github.com/Daniellli/LiON

1.Motivation
基于点云的语义场景理解是自动驾驶汽车感知技术栈中的重要模块。然而,由于点云不像图像那样具有丰富的语义信息,在点云中这个识别异常点是一项极具挑战性的任务。本工作从两个方面缓解了点云缺乏语义信息对异常点感知的影响:1) 提出了一种新的学习范式,使模型能够学习更鲁棒的点云表征,增强点与点之间的辨别性;2) 借助额外的数据源,ShapeNet,提出了一套可以生成多样且真实伪异常的方法。实验结果表明,在公开数据集 SemanticKITTI 和 NuScenes 上,本方法显著超越了前 SOTA。
2.Method
给定一个场景点云,点云语义分割的主要任务是为点云中的每个样本点分配一个预先定义的类别,例如车、树、行人等。本工作将这些属于预先定义类别的样本点称为正常样本点。而 点云异常检测则作为点云语义分割模块的补充,用于识别那些不属于预先定义类别集合的样本点,例如桌子、椅子等无法预料的类别。本工作将这些样本点称为异常样本点。
此前的工作 REAL 将图像异常检测方法直接适配到点云异常检测领域,并通过实验发现,大量异常样本被错误分类为预先定义的类别。为了解决这一问题,REAL 提出了一种新的校正损失,用于校正正常样本的预测。然而,本工作的实验结果表明,尽管该校正损失能够提升异常样本的分类性能,但同时也对正常样本的分类性能造成了显著的负面影响。
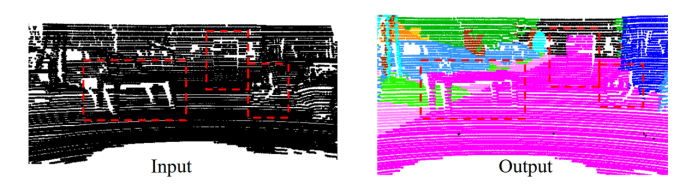
本工作将图像异常检测方法在点云异常检测领域表现不佳的原因归结于点云不像图像那样具有丰富的语义信息。比如Figure 1左侧,即使是人类也难以识别道路中央的家具信息。因此,该工作从两个方面缓解点云缺乏丰富语义含义所带来的影响。
首先,该工作提出为每个样本点计算一个惩罚项,并通过额外的损失函数保证正常样本点的惩罚较小,而异常样本点的惩罚较大。然后,将该惩罚项嵌入交叉熵损失中,以动态调整模型的优化方向。通过为每个样本点学习额外的惩罚项并改进学习范式,本工作增强了样本点之间的辨别性,缓解了点云缺乏语义信息的问题,从而全面提升了异常检测能力。
此外,该工作提出利用 ShapeNet 数据集生成伪异常。ShapeNet 是一个大规模的三维形状数据集,包含超过 22 万个三维模型,覆盖 55 个主要类别和 200 多个子类别。因此,通过 ShapeNet 生成的伪异常具有较高的多样性。其次,在生成伪异常时,该工作进一步考虑了点云的采样模式,从而使生成的伪异常更加真实。因此,该工作通过生成更加多样且真实的伪异常,更好地估计和模拟了真实异常的分布,缓解了点云缺乏语义信息的问题。
2.1. 模型整体架构
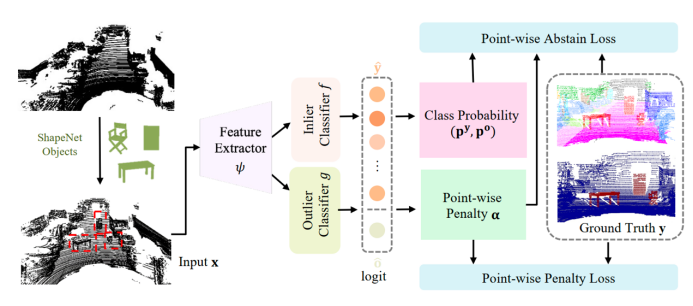
如Figure 2所示,本工作通过伪异常生成方法对输入点云进行编辑生成带有伪异常的输入点云x, 而后该点云通过特征提取器和正常样本分类器f和异常样本分类器g处理, 得到正常类别logit , 以及异常类别logit , 而后通过softmax 处理, 可以拿到正常类别概率和异常类别概率。c表示正常样本类别数量,n表示给定点云的点数量。该处理过程可以形式化表达为:
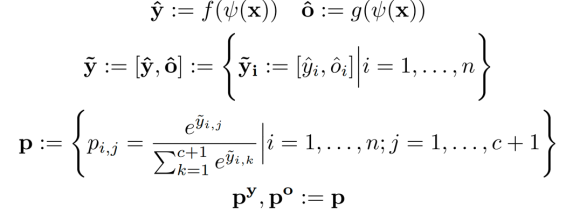
其中[·]表示拼接操作。
2.2. 基于逐点惩罚的学习范式
本工作提出对每个样本点用能量函数计算一个额外的惩罚项,惩罚项的计算如下所示:

此外,该工作通过一个额外的逐点惩罚损失函数使得对于所有的正常样本点都有个较小的惩罚,对于所有的异常样本点都有较大的惩罚。该逐点惩罚损失函数的形式化表达如下:
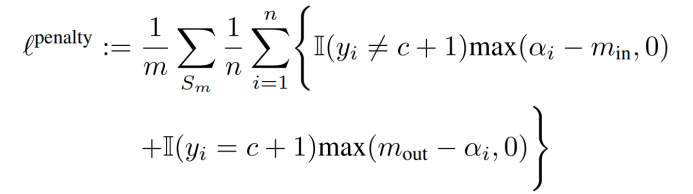
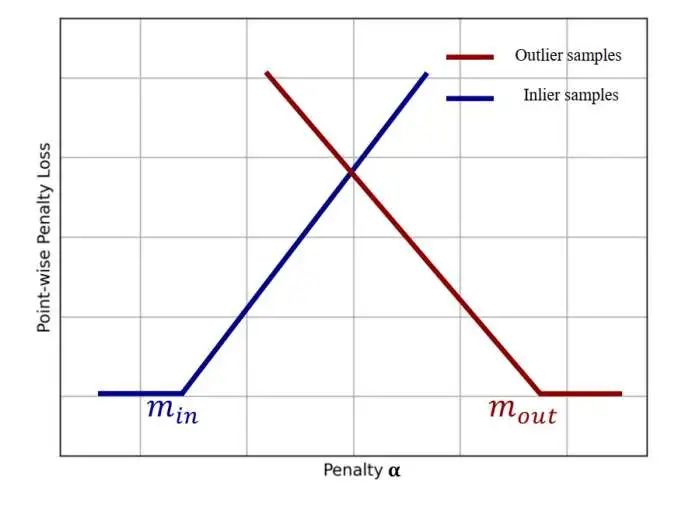
其中,m表示数据集大小;n表示场景点数量;I(.)表示示性函数;{1,...,c,c+1}为样本点类别真值,c+1表示异常类别;max(.)为最大值函数;,为超参数。该损失函数的作用如Figure 3所示,对于所有的正常样本点(逐点惩罚损失函数公式左侧),如果惩罚项大于,损失函数的值就会大于0;反之,损失函数的值等于0。异常样本的情况与此类似。通过优化逐点惩罚损失函数,就可以对所有的正常样本计算得到一个接近甚至小于的惩罚, 对于所有异常样本得到一个接近甚至大于的惩罚。
而后,该工作用惩罚项升级交叉熵损失函数,动态调整交叉熵损失的优化重点, 升级后的交叉熵损失函数被叫做逐点拒绝(abstain)损失函数:
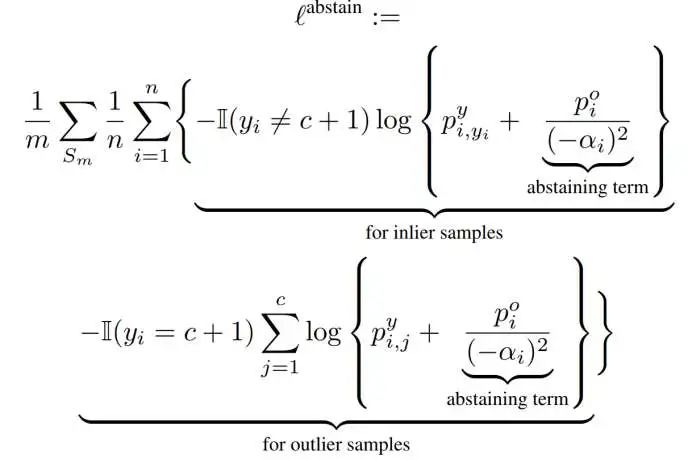
对于所有正常样本,该算法会计算得到一个较小的惩罚系数。将其取负后,值会变得较大,而取负后的平方值则会进一步放大。因此将异常类别概率除上该值,异常类别概率对于逐点拒绝损失函数的影响会被抑制,从而逐点拒绝损失函数重点会放在优化正常类别概率上。异常样本的情况与此类似。
因此整个算法的损失函数为:

其中为损失函数的系数。
2.3.合成数据生成点云异常
该工作通过引入额外的数据源, ShapeNet,来生成更加多样且真实的伪异常,从而更好地近似真实异常分布。首先,通过伯努利分布计算插入的伪异常数量G。而后,通过循环G次下面流程来插入伪异常。
如Figure 4所示,该生成方法包括以下步骤:(a)加载物体后,基于均匀分布计算平移距离和旋转角度,并对物体进行(b)平移和(c)旋转,使其有可能放置在场景中的任意角落;(d)基于均匀分布计算的缩放系数,对物体进行缩放;(e) 将物体放置于场景地面; (f)使用被插入物体遮挡住的场景样本点来替换插入物体的样本点。

3.Experiment
实验结果表明,该工作提出的方法在SemanticKITTI和NuScenes两个公开数据集上能够大幅优于之前的SOTA方法。
3.1.实验基准
该工作沿用了之前的实验基准。采用SemanticKITTI和NuScenes作为基准数据集。在SemanticKITTI中,将{other-vehicle}设为异常类别;在NuScenes中,将{barrier,constructive-vehicle,traffic-cone,trailer}设为异常类别。这些异常类别的样本在训练过程是不可见的。
在测试阶段,主要评估算法对这些被设为异常类别的样本的分类精度,采用的评价指标主要包括 AUPR 和 AUROC。此外,对于正常样本分类的评估指标为。该任务的目标是在保证不受影响的前提下,尽可能提升AUPR和AUROC。
3.2.定量结果

该工作沿用之前的实验设置, 选C3D(Cylinder3D)作为分割基座模型。前SOTA方法, APF,没有在NuScenes上开展实验并且没有开源代码, 因此该工作无法在NuScenes上与其进行对比。Table 1实验结果表明,该工作提出的算法在两个公开基准数据集上大幅优于之前SOTA方法。
3.3.定性结果
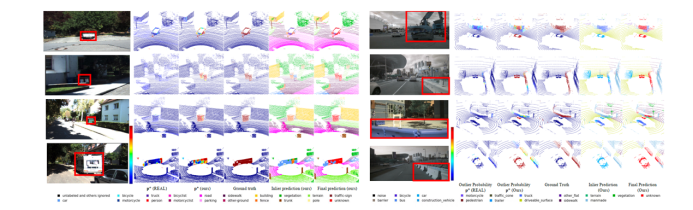
与前SOTA算法对比,该工作提出的算法不管是在64线雷达采集的点云数据上(SemanticKITTI)还是32线雷达采集的点云数据(NuScenes)上都表现出了优越的性能, 不仅能够精确定位异常类别而且能够赋予较高的置信度。
① 2025中国国际新能源技术展会
自动驾驶之心联合主办中国国际新能源汽车技术、零部件及服务展会。展会将于2025年2月21日至24日在北京新国展二期举行,展览面积达到2万平方米,预计吸引来自世界各地的400多家参展商和2万名专业观众。作为新能源汽车领域的专业展,它将全面展示新能源汽车行业的最新成果和发展趋势,同期围绕个各关键板块举办论坛,欢迎报名参加。

② 国内首个自动驾驶学习社区
『自动驾驶之心知识星球』近4000人的交流社区,已得到大多数自动驾驶公司的认可!涉及30+自动驾驶技术栈学习路线,从0到一带你入门自动驾驶感知(端到端自动驾驶、世界模型、仿真闭环、2D/3D检测、语义分割、车道线、BEV感知、Occupancy、多传感器融合、多传感器标定、目标跟踪)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、大模型,更有行业动态和岗位发布!欢迎扫描加入

③全网独家视频课程
端到端自动驾驶、仿真测试、自动驾驶C++、BEV感知、BEV模型部署、BEV目标跟踪、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、车道线检测、轨迹预测、在线高精地图、世界模型、点云3D目标检测、目标跟踪、Occupancy、CUDA与TensorRT模型部署、大模型与自动驾驶、NeRF、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频(扫码即可学习)

④【自动驾驶之心】全平台矩阵


















 1130
1130

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









