 特斯拉请回雷达
特斯拉请回雷达




作者 | 有据无车 编辑 | 智能车参考
点击下方卡片,关注“自动驾驶之心”公众号
戳我-> 领取自动驾驶近15个方向学习路线
本文只做学术分享,如有侵权,联系删文
员工都能先裁再请回来,雷达当然也可以。
马哥的回旋镖永远在路上:
雷达重新上车特斯拉了。
并且请回雷达的原因,还和FSD有关系。
但是这颗雷达,不在车顶,也不在车底,而是在车里。
特斯拉请回雷达
专注跟踪特斯拉动态的黑客“绿神”green,近日在社交平台爆料,他通过逆编译破解了特斯拉的软件更新数据,指出特斯拉将移除座位占用传感器。
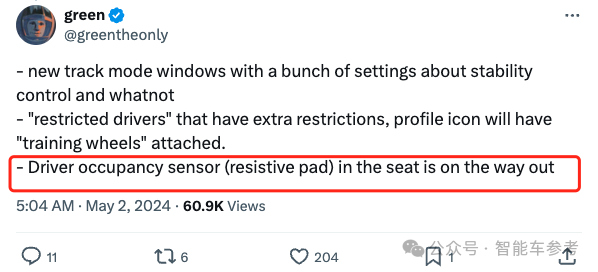
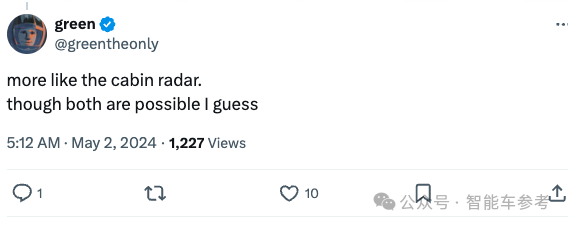
转而使用舱内摄像头或舱内雷达来实现其原有功能,并表示后者可能性更大。
因为早在2021年4月,特斯拉就获准安装车内雷达。
由4个发射器和3个接收天线组成,信号可穿透柔软的材料,并区分儿童和座椅上的物体,甚至可以监测呼吸、心率等视觉无法捕捉的信息。
不过特斯拉这次上车,主要考虑的是用来检测车辆发动时,主驾是否有人。
不知道出于什么心态,或许是太相信FSD,北美有车主此前用作弊装置,欺骗车辆系统,让车子开动时误认为有人在主驾,实现“无人驾驶”。
修复这个bug,同时也能优化另一个问题:
此前有车主反馈,座椅传感器过于灵敏,自己稍微晃动一下,就会被误检为无人,然后车子就减速停车了。

现在用座舱雷达,能避免该问题,帮相关车主省点钱——有博主称修一次需要花3500美元(折合人民币约为2.54万元)。
智能车的兴起,也正在加速座舱雷达上车。
解析座舱雷达
座舱雷达主要应用于车内活体检测、乘驾人员状态监测以及入侵检测。
比如车内遗忘儿童或宠物,有座舱雷达检测到,就能通过系统发出警报。

同时还可以和DMS(驾驶员监控系统)结合,在视觉维度之外,提供生命体征信息,更全面地分析驾驶员的状态,特别是在未来实现L3级自动驾驶时。
目前座舱雷达主要存在两大技术规范之争:
毫米波和UWB。
毫米波有以下频段:
24GHz,2022年已废止,新车不得再使用
77GHz和79GHz,供车外专用。座舱雷达频段应规避该频段,否则会造成无线信道冲撞。
60GHz,特斯拉的座舱雷达方案就是57-64GHz频段。

车载UWB雷达则主要应用6-8GHz频段,目前在全球主要地区都属于合规频段。
从成本上来看,UWB雷达比毫米波雷达便宜的多,不过穿透力和分辨率不如毫米波雷达。
不过虽然调侃马斯克回旋镖,但特斯拉这次座舱内应用雷达,可能也会再次引领行业风气之先。
投稿作者为『自动驾驶之心知识星球』特邀嘉宾,欢迎加入交流!
① 全网独家视频课程
BEV感知、BEV模型部署、BEV目标跟踪、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、车道线检测、轨迹预测、在线高精地图、世界模型、点云3D目标检测、目标跟踪、Occupancy、cuda与TensorRT模型部署、大模型与自动驾驶、Nerf、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频(扫码即可学习)

② 国内首个自动驾驶学习社区
国内最大最专业,近3000人的交流社区,已得到大多数自动驾驶公司的认可!涉及30+自动驾驶技术栈学习路线,从0到一带你入门自动驾驶感知(2D/3D检测、语义分割、车道线、BEV感知、Occupancy、多传感器融合、多传感器标定、目标跟踪)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、大模型、端到端等,更有行业动态和岗位发布!欢迎扫描下方二维码,加入自动驾驶之心知识星球,这是一个真正有干货的地方,与领域大佬交流入门、学习、工作、跳槽上的各类难题,日常分享论文+代码+视频

③【自动驾驶之心】技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦感知、定位、融合、规控、标定、端到端、仿真、产品经理、自动驾驶开发、自动标注与数据闭环多个方向,目前近60+技术交流群,欢迎加入!扫码添加汽车人助理微信邀请入群,备注:学校/公司+方向+昵称(快速入群方式)

④【自动驾驶之心】全平台矩阵


















 3345
3345

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









