



本篇文章旨在简单介绍一下本人对OriginBot智能机器人的学习。
1.在虚拟机中搭建ROS2环境搭建
本次使用的安装方法是鱼香ROS来进行一键安装ROS2。
代码为:wget http://fishros.com/install -O fishros && bash fishros
这个一键安装很方便,根据之后显示出来的提示就能顺利安装ROS2完成环境搭建了。
2.通过MobaXTerm访问Originbot机器人终端
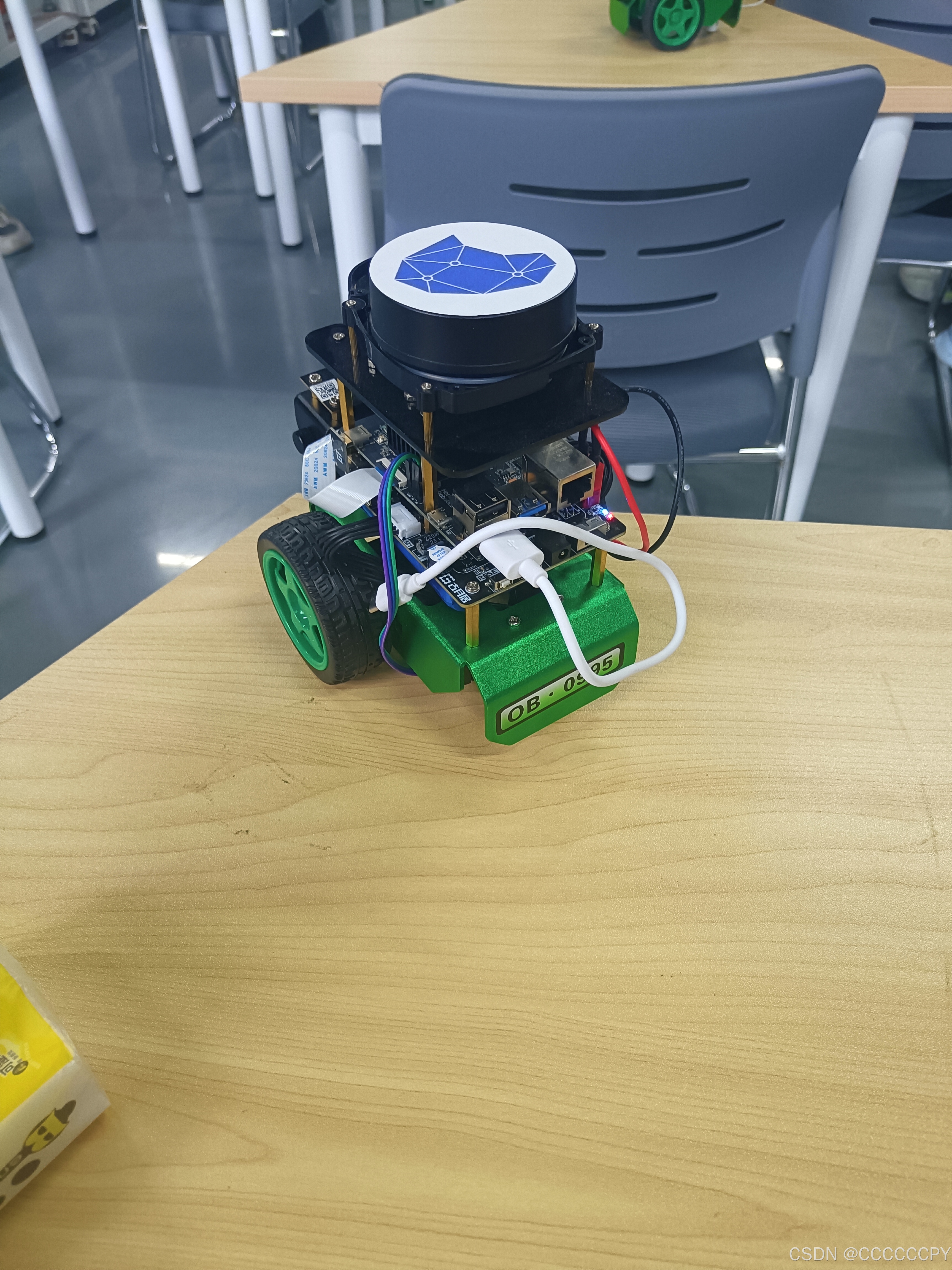
这是本次需要用到的小车,通过一根数据线和电脑相接(确保小车开关打开以及电源充足)

这是本次所需软件:MobaXTerm,我们将通过该软件实行大部分的操作。
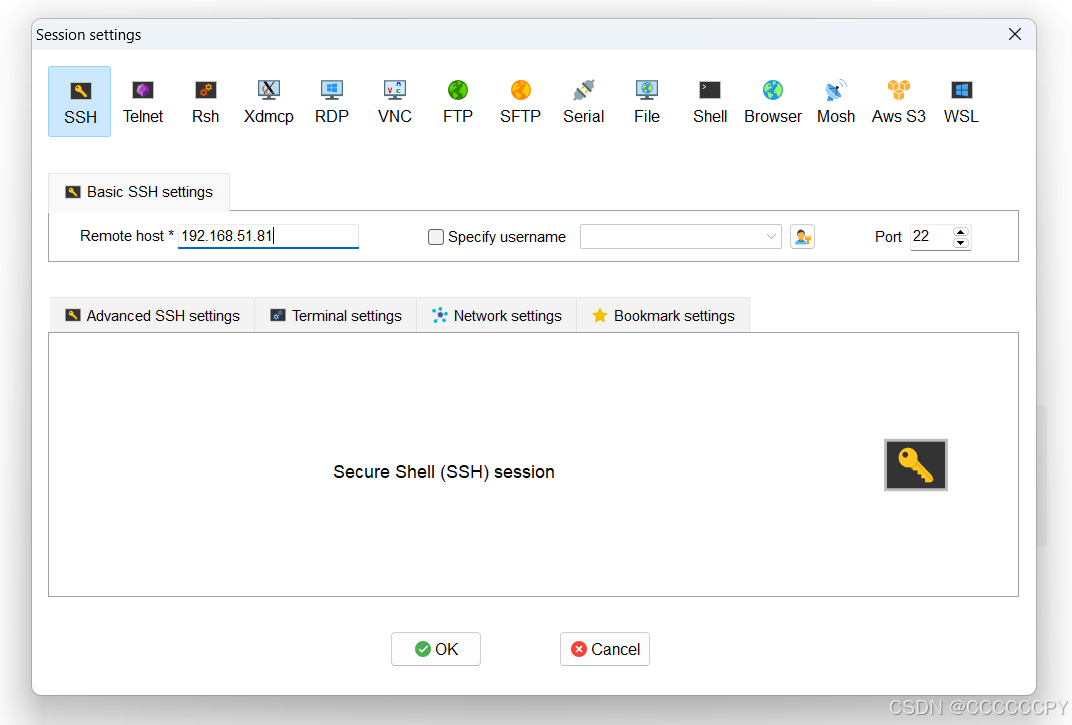
点击Session,打开设置界面,在Serial界面中进行如下设置(com4是一个示例):
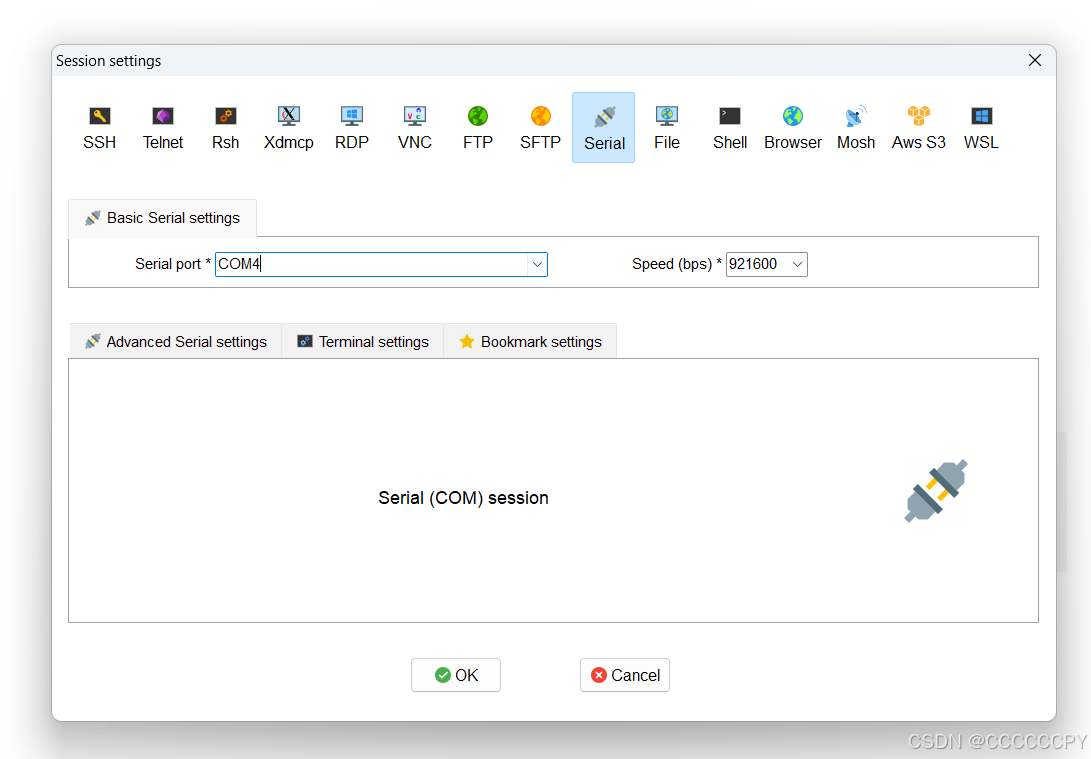
之后点击[OK],在打开的界面里输入用户名和密码(一般来说均为root)
随后,我们要建立起虚拟机与机器人的远程连接。MobaXTerm里继续输入:
sudo nmcli device wifi connect "网络名字" password 密码
使得机器人连上局域网。
再通过输入ipconfig查询机器人的IP地址
随后在虚拟机ROS里输入:
ssh root@IP
如:
之后,机器人和虚拟机就顺利地建立起联系了
3.机器人实际运行
让我们回到MobaXTerm上,打开Session界面创建关于机器人IP的终端:
随后输入
ros2 launch originbot_bringup originbot.launch.py
使得机器人底盘驱动启动(机器人会有蜂鸣提醒)
另开一个一模一样的终端,输入:
ros2 run teleop_twist_keyboard teleop_twist_keyboard
来通过键盘测试小车是否 接受我们的控制(数据线此时可以拆除)
cd /userdata/dev_ws
和
ros2 launch gesture_control gesture_control.launch.py
此时在浏览器网址栏里输入【机器人IP:8000】
就能够在网页里看见小车摄像头的视角了

此时,我们也可以通过特定手势来操控小车的行进了。
至此,本次学习暂且告一段落。

















 515
515

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









