







概述: 安装好所需要的软件和环境,通过python代码控制无人机进行起飞和降落。
参考资料:
1、知乎宁子安大佬的AirSim教程(文字教程,方便复制)
2、B站瑜瑾玉大佬的30天RL无人机仿真教程(视频教程,方便理解)
3、AirSim官方手册(资料很全,不过是纯英文的)
AirSim无人机仿真入门(一):实现无人机的起飞与降落
1 安装AirSim
1.1 参考教程
宁子安教程:(解密AirSim-初稿)第一章:初识AirSim
1.2 内容梳理
Epic Games是一家游戏公司,就像“腾讯游戏”或者“网易游戏”一样。Unreal Engine(简称UE)是 Epic Games 开发的一款游戏引擎。AirSim 是基于 Unreal Engine开发的一个模拟器,它主要用来模拟无人机(Drone)和自动驾驶汽车的运行环境。
1.3 步骤总结
以下仅是我个人的步骤总结,建议按照以上宁子安的“初识AirSim”教程一步一步安装。
- 安装Epic平台: 记得注册账号
- 下载UE: 点击Epic平台左边的 “虚幻引擎” 菜单,“库” 里面有不同的虚幻引擎版本,选择4.27.2版本进行安装,这个版本比较适配AirSim。
- 安装VS commuty2022: 记得勾选“C++桌面开发” “Windows 10 SDK 10.0.19041”,并在“单个组件”选项卡下选择最新的“.NET Framework SDK”
- 安装git bash工具
- 克隆AirSim工程: 进自己要安装AirSim的磁盘,git clone。进入目录build.cmd。编译好之后会在 “AirSim\Unreal” 文件夹中生成 “Plugins” 文件夹。这个 “Plugins” 文件夹非常重要。
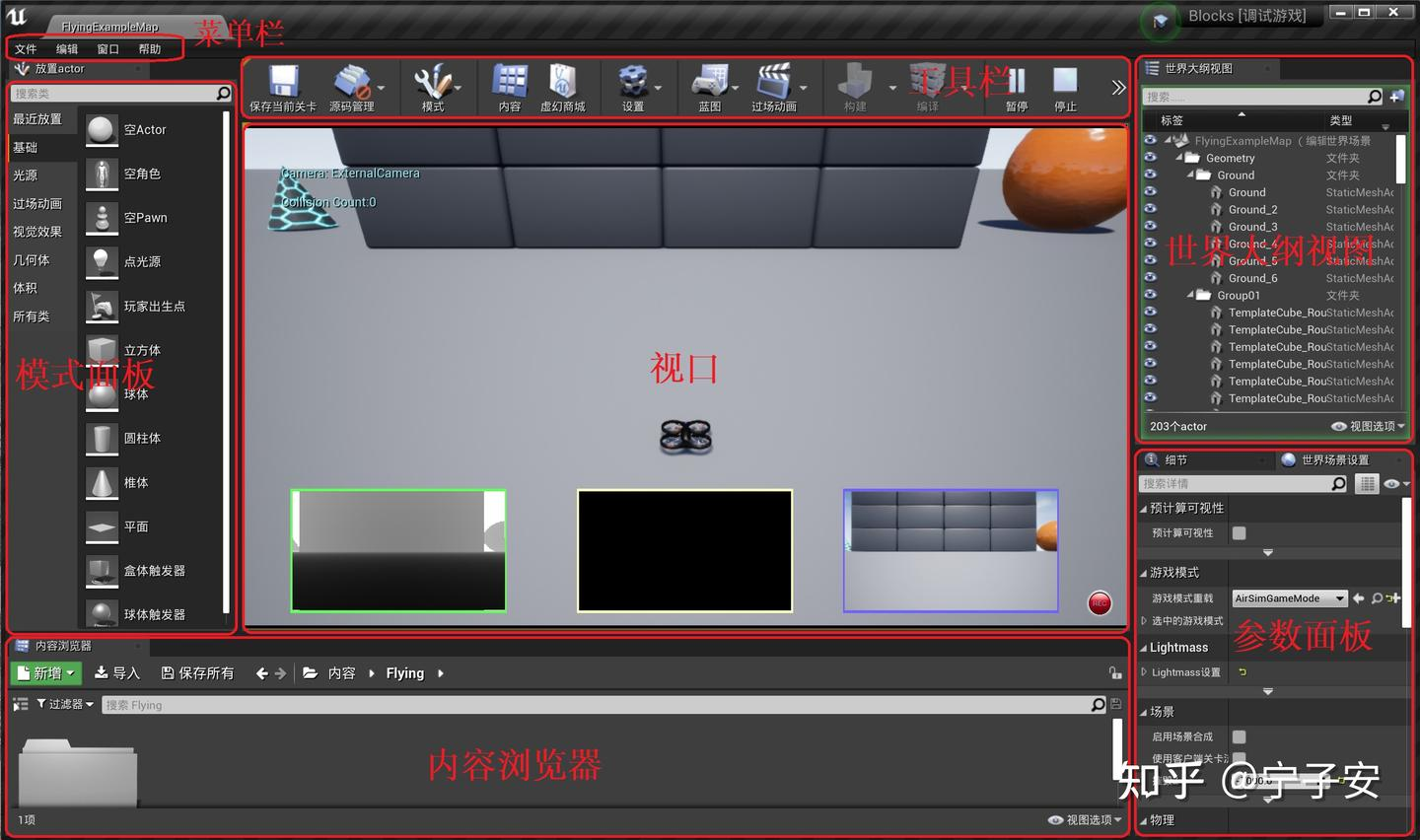
- 检验虚拟引擎和AirSim是否安装成功: 使用AirSim自带的Block环境进行测试。
至此,AirSim 全部安装完成,下面可以直接使用 AirSim 做仿真了。
2 开始使用 AirSim
2.1 参考教程
宁子安教程:(解密AirSim-初稿)第二章:开始使用 AirSim
2.2 内容梳理
从虚幻商城选择一个场景创建工程,把AirSim作为插件导入这个工程中。
2.3 步骤总结
- 创建工程: 从虚幻商城中找到场景,创建工程,得到.uproject文件。
- 新建C++类: 双击.uproject文件进入关卡编辑器,新建C++类,等待编译完成(这一步耗时较长,而且要关注VS2022的左下角的编译进度),得到.sln文件,至此 “山脉景观” 场景工程创建完成。
- 添加AirSim插件: 复制“AirSim\Unreal\Plugins” 文件夹到“LandscapeMountains” 文件夹中。
- 修改文件: 修改 “LandscapeMountain.uproject”
文件,修改“LandscapeMountains\Config\DefaultGame.ini” 文件。 - 创建VS工程: 右键点击 “LandscapeMountains.uproject” 文件,选择 “Generate Visual Studio project files” 选项,会生成 “.sln” 工程文件。
- 改成多旋翼模式: 把settings.json文件中的仿真模式改为多旋翼。
{
"SettingsVersion": 1.2,
"SimMode": "Multirotor"
}
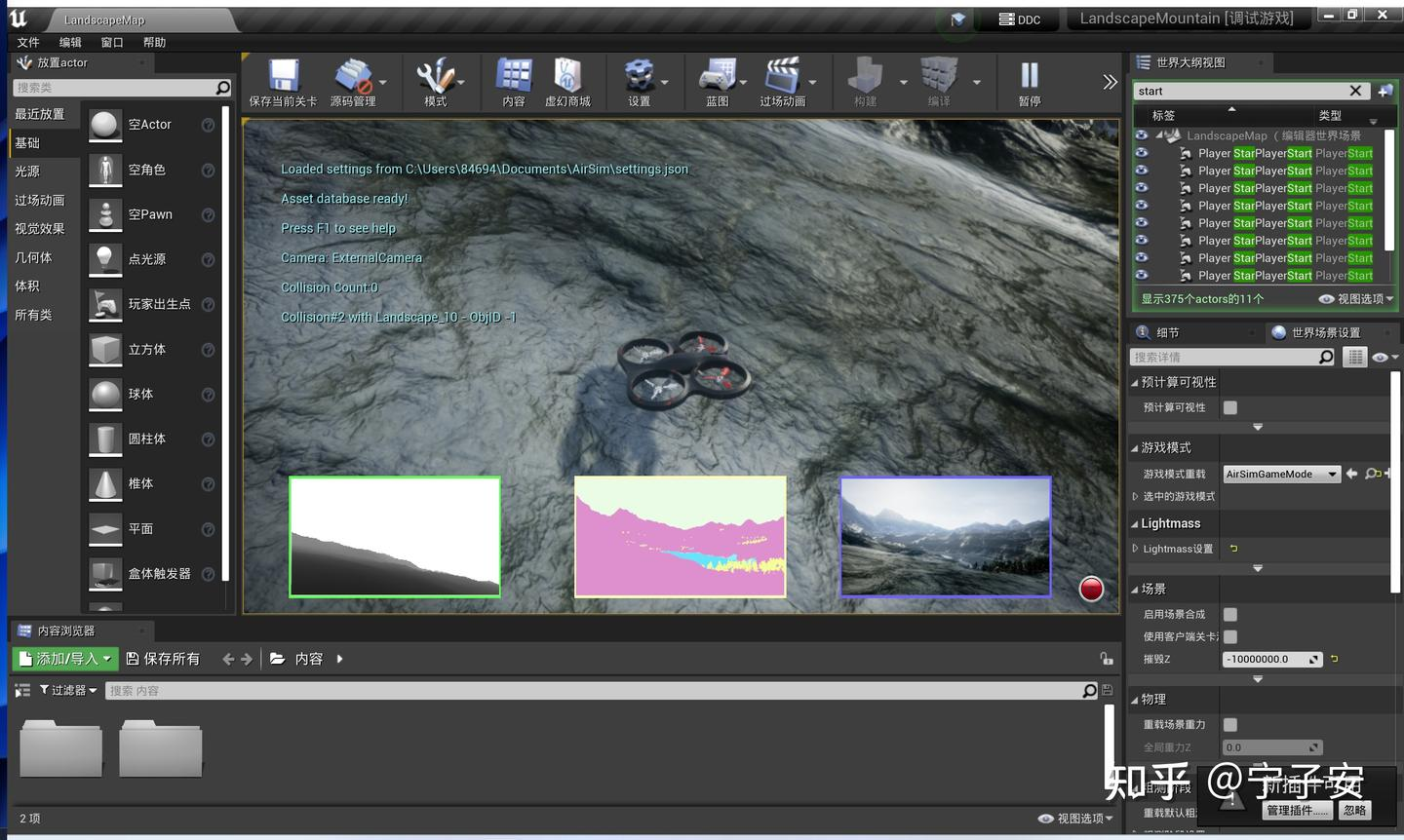
- 进入工程: 双击打开 “LandscapeMountains.sln”,设置编译选项为 “DebugGame Editor” 和“Win64”,同时将 “LandscapeMountains” 设为启动项,点击 “调试” -> “开始调试”,或者直接点击 “本地Windows调试器”,这时会自动打开虚幻引擎的关卡编辑器。此时,虚幻引擎编辑器右下角出现了“新插件可用”的提示,说明虚幻引擎已经能够识别到AirSim 插件了。
- 设置游戏模式为AirSim: 在关卡编辑器中,将右侧 “世界场景设置” 中的 “游戏模式重载” 设置为“AirSimGameMode”,点击 “保存当前关卡”。
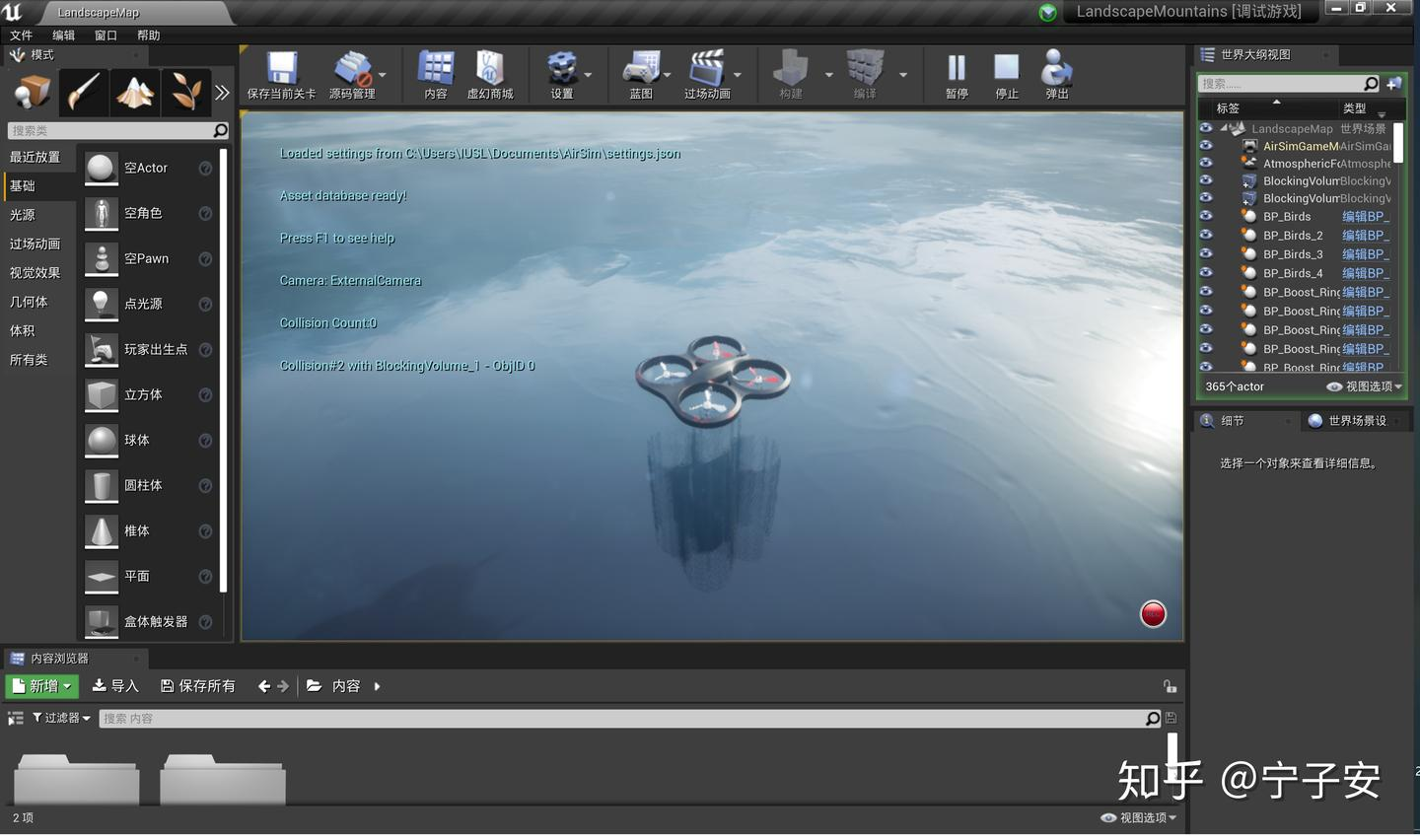
- 运行: 点击绿色三角开始仿真
至此 AirSim 插件已经加载到虚幻引擎场景工程中了。
3 撰写python控制程序
3.1 参考教程
宁子安教程:airsim详细教程(四) - 控制四旋翼起飞和降落(airsim api)
3.2 内容梳理
安装好python的运行环境,主要使用conda虚拟环境的python解释器,pycharm充当编辑器的作用。使用AirSim官方提供的python API,与无人机建立联系,控制无人机的起飞和降落。
3.3 步骤总结
- 安装Anaconda并创建环境: 创建虚拟环境,并在该环境中安装必需的包
pip install msgpack-rpc-python
pip install airsim
- 安装pycharm: 安装了社区版,是免费的,目前功能够用。
- 创建工程: pycharm中创建一个新的python工程,解释器选择上面新建的conda环境中的python解释器:
conda的安装路径\envs\airsim\python.exe - 创建python文件: 在新建的python工程中新建一个python File,将下面的代码复制进去:
import airsim
# 与 AirSim 仿真器建立连接,并且返回句柄
client = airsim.MultirotorClient()
client.confirmConnection()
# 获得控制权
client.enableApiControl(True)
# 解锁无人机
client.armDisarm(True)
# Async函数在执行的时候会立即返回.此时有可能任务还没执行完。在后面加上.join(),就可以让当前函数执行完才执行下一行
client.takeoffAsync().join()
client.landAsync().join()
# 上锁
client.armDisarm(False)
# 释放控制权
client.enableApiControl(False)
-
运行代码: 在右上角点击绿色三角形运行python程序,仿真中的四旋翼会先起飞到一定高度,然后降落。
-
python与AirSim的通信机制: AirSim API 使用的是 TCP/IP 中的 msgpack-rpc 协议,可以用两台不同的电脑来做仿真,一台跑 AirSim 和 Unreal(仿真),另一台跑 python程序(算法)。
当 AirSim 开始仿真的时候,会打开 41451 端口,并监听这个端口的需求。python 程序使用 msgpack serialization 格式向这个端口发送 RPC 包,就可以与AirSim进行通信了。如果41451 端口已经被其他程序使用了,那么可以通过 settings 文件改变AirSim使用的端口号。
使用这种网络通信协议的方式,可以将 AirSim 和 python程序隔离,互不干扰。所以不需要修改 AirSim 的任何源代码,就可以满足非常多的仿真需求;而且即使python程序中断了,AirSim 的仿真也可以继续进行。
示例:一台跑仿真,一台跑python程序
server_ip = "192.168.0.10" # 示例 IP 地址 port = 41451 client = airsim.MultirotorClient(ip=server_ip, port=port)
4 注意事项
问题: 我发现进行仿真的时候,我的UE界面没有显示三个摄像头的画面,跟原教程截图的不一样。

解决方法: 修改settings.json 文件打开无人机的三个摄像头窗口
"SubWindows": [
{"WindowID": 0, "ImageType": 0, "CameraName": "front_center", "Visible": true},
{"WindowID": 1, "ImageType": 3, "CameraName": "front_center", "Visible": true},
{"WindowID": 2, "ImageType": 5, "CameraName": "front_center", "Visible": true}
]
其中,ImageType 的值表示图像类型:
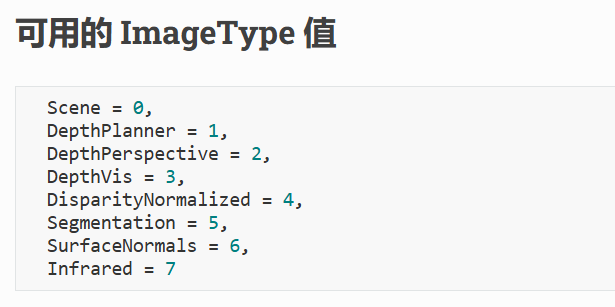
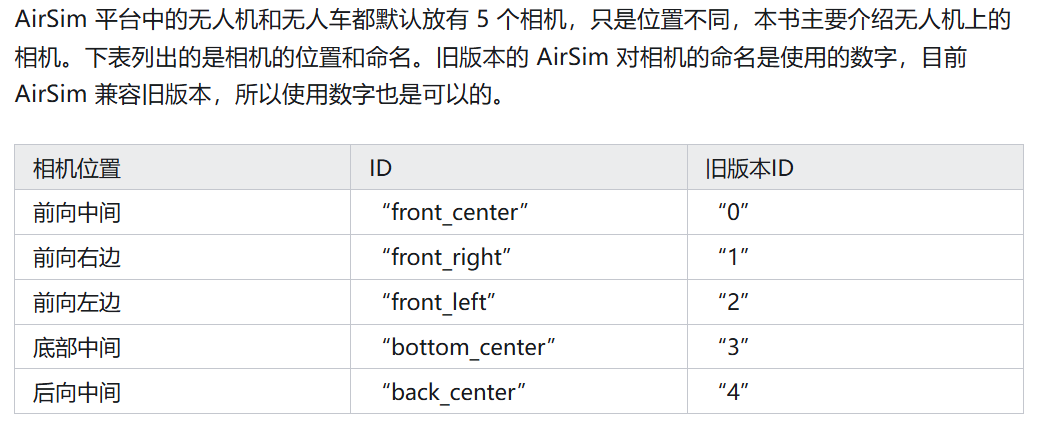
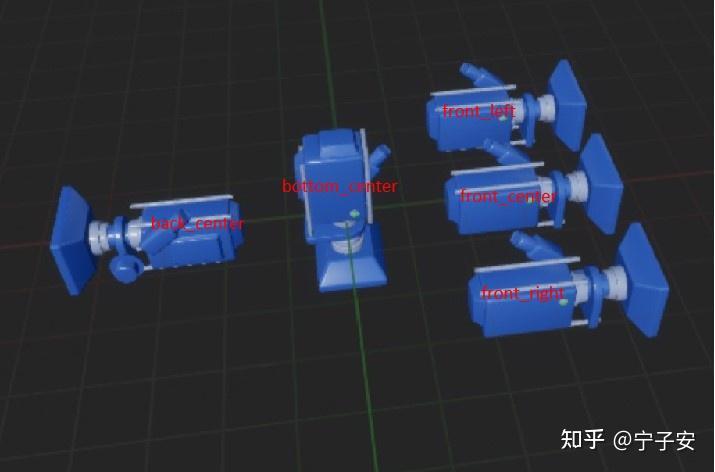
CameraName的值表示是哪一个相机:
至此,AirSim 环境已成功安装,并实现了使用 Python 程序控制无人机的功能。这可以视作 AirSim 入门的“Hello World”示例,后续的算法迁移正在进行中…

















 4058
4058

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









