



原文信息
原文标题:“Metasurface-enhanced light detection and ranging technology”
第一作者:Renato Juliano Martins
通讯作者:Patrice Genevet
激光雷达(LiDAR)相关背景
激光雷达如今受到广泛关注,这与近年来智能驾驶的快速发展密切相关。其概念最早诞生于上世纪 60 年代,当时麻省理工学院的科学家向月球表面发射光辐射时探测到回波信号。激光雷达的探测原理丰富,既有 ToF 这种较为直接的方式,也包括调幅、调频连续波(AMCW、FMCW)等相对复杂的类型。若将其看作一个视觉系统,拥有宽广的视野(大视场角 FOV)和快速的感知能力(高成像速度)是其理想的性能表现。
超表面在激光雷达中的应用及局限
超表面可通过表面的微纳结构实现对光线的调控。理论上,若将光学特性可调的材料设计成超表面单元,并配合控制电路,能够实现激光雷达系统所需的光学扫描功能。但由于现有工艺能力和效率的限制,这种设计方法存在一定局限性。
文章提出的创新方案
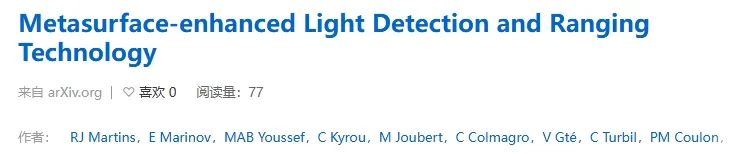
在本次研读的文章中,作者提出了一种创新设计:将一块超表面与 AOD(声光偏转器,acousto-optic deflector)进行级联。通过这种方式,光被投射到超表面的不同区域,进而导向空间特定位置。该设计既利用了 AOD 扫描速度快的优势,又借助超表面实现了 150°×150° 的大视场角。
系统结构说明
这套系统的结构如图 1 所示。AOD 可实现 2° 视场角的扫描,搭配一块特殊设计的超表面后,投射到超表面不同位置的光线会产生不同角度的偏转,从而使系统获得 150°×150° 的大视场角。当光照射物体产生回波后,通过透镜和探测器收集回波,以此实现三维成像。
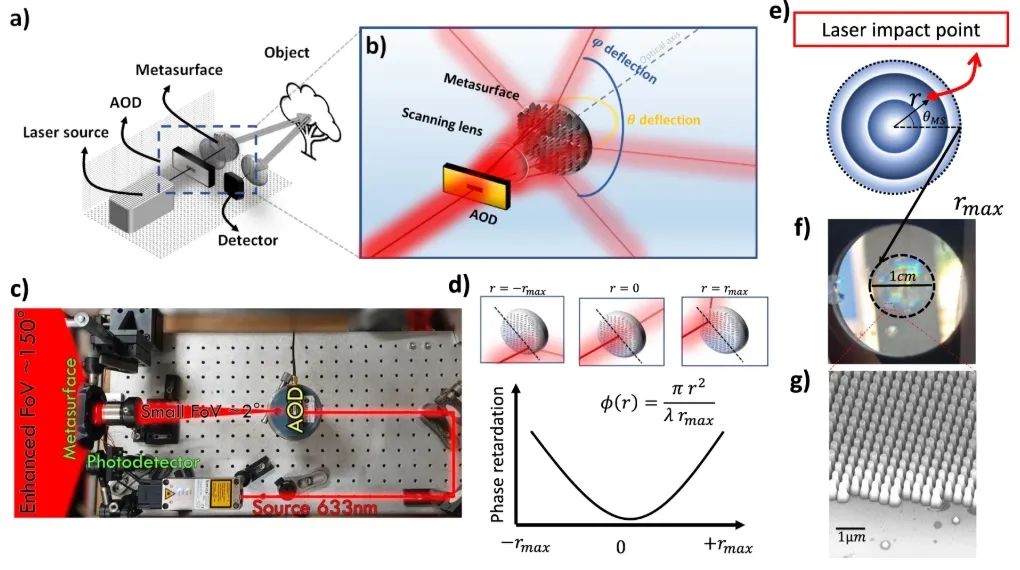
图1 超表面加持的激光雷达系统
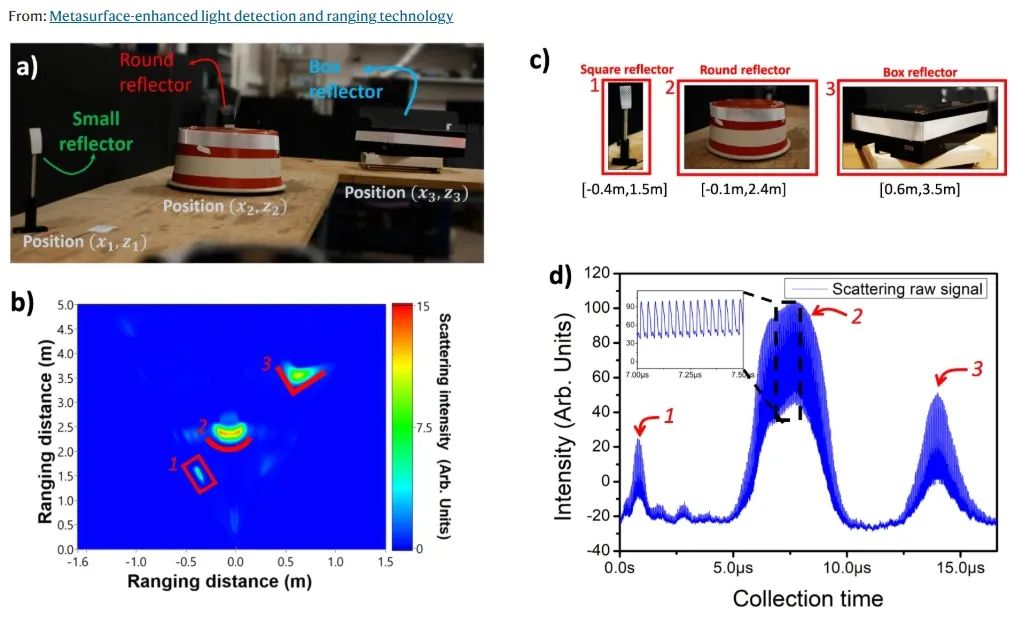
图2 一维TOF成像测试效果
系统测试结果
图 2 展示了一维 TOF 成像效果,测试场景为桌子上的三个移动物体。从成像结果和探测到的脉冲数据可知,该系统能够感知这三个物体的位置。
图 3 呈现了三维广角成像测试结果,在该场景中,身穿反光服人员在不同位置的动作被系统准确探测到。
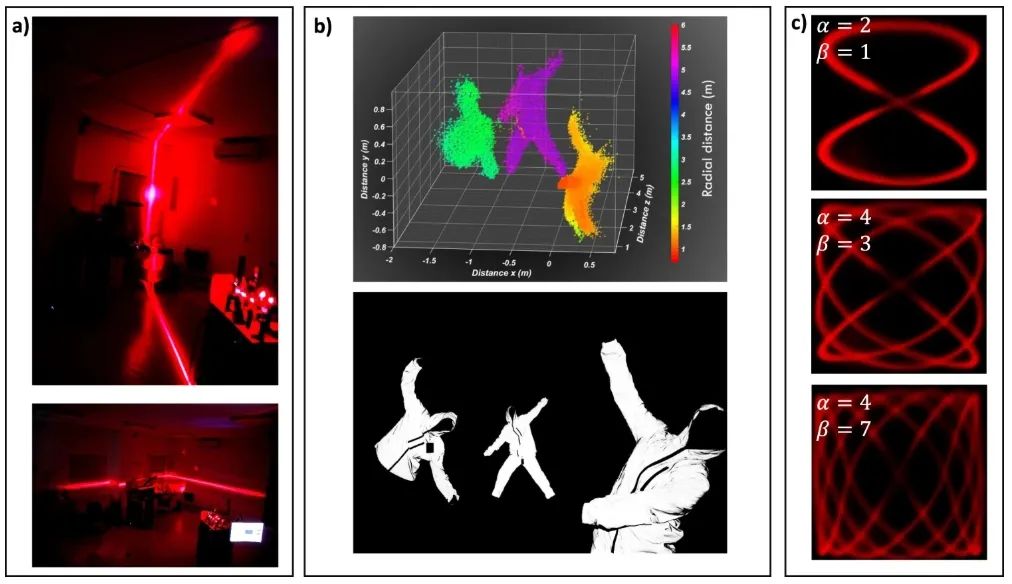
图3 三维广角成像测试
OAS 光学软件的超表面设计功能非常便捷,该功能将构建更为高效、精准的超表面设计流程,进一步推动光学领域的发展。OAS 光学软件已在超表面设计中展现卓越效能,为科研人员和工程师提供技术保障。

















 611
611

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









