




点云分割
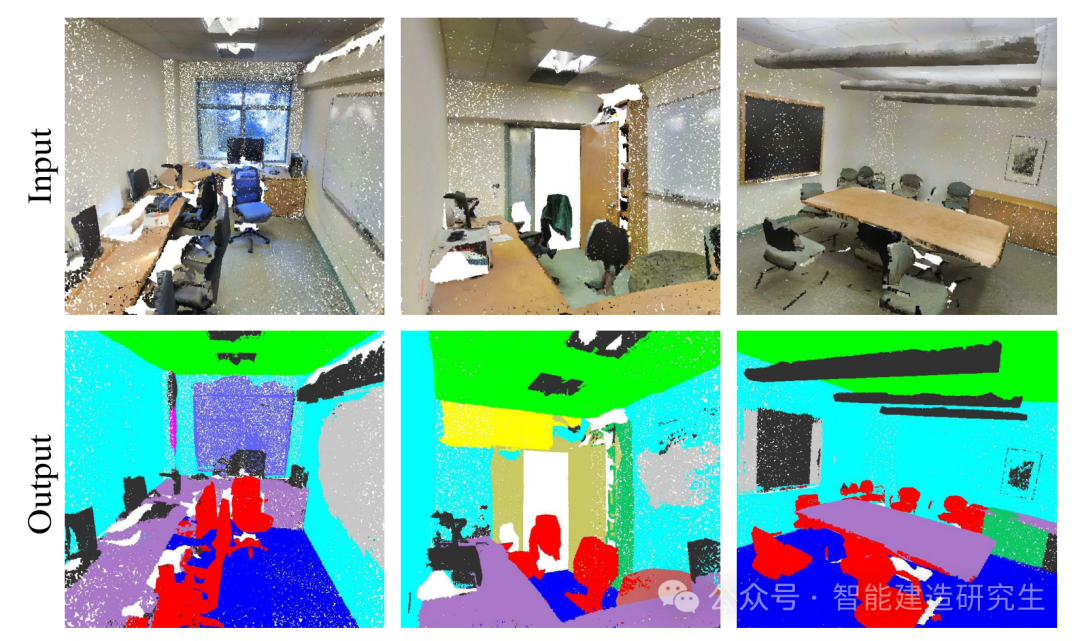
图自:https://openaccess.thecvf.com/content_cvpr_2017/papers/Qi_PointNet_Deep_Learning_CVPR_2017_paper.pdf《PointNet:用于3D分类和分割的点集深度学习》
点云分割(Point Cloud Segmentation)是计算机视觉和3D图像处理中的一个重要步骤,通过将点云数据划分成有意义的子集,以便于进一步分析和处理。点云分割可以帮助识别和提取场景中的特定对象或区域,例如建筑物、道路、车辆等。这对于各种应用场景如自动驾驶、3D建模、机器人导航等都至关重要。

图自:https://openaccess.thecvf.com/content_cvpr_2017/papers/Qi_PointNet_Deep_Learning_CVPR_2017_paper.pdf《PointNet:用于3D分类和分割的点集深度学习》
点云平面分割是从激光扫描仪获取的无序点云自动重建室内和城市环境的基本任务。作为最常见的平面分割方法之一,随机采样一致性 (RANSAC) 通常用于连续检测一个又一个的平面。
为什么要进行点云分割?
进行点云分割的主要原因有以下几点:
-
简化数据处理:分割后的点云数据更易于处理和分析,减少了计算复杂度。
-
提高识别精度:通过分割,将不同对象从点云中分离出来,有助于提高对象识别和分类的准确性。
-
增强应用效果:在实际应用中,分割后的点云可以更好地用于3D建模、环境感知、物体检测等任务,提高应用效果和实用性。
RANSAC算法发展历史
RANSAC(Random Sample Consensus,随机抽样一致性)算法由Fischler和Bolles于1981年提出,是一种通过随机抽样找到数据中的模型参数的算法。RANSAC在处理含有大量噪声和离群点的数据时,表现尤为出色。该算法的核心思想是反复从数据集中随机抽取样本,估计模型参数,并通过评估一致性来选择最优模型。尽管RANSAC已经有40多年的历史,但其简单有效的特性使其在点云分割、图像匹配、平面拟合等领域依然广泛应用。
算法概述
Fischler 和 Bolles 提出的 RANdom SAmple Consensus (RANSAC) 算法 [1] 是一种通用的参数估计方法,旨在应对输入数据中大量离群值。与许多从统计学文献中被计算机视觉社区采用的常见鲁棒估计技术(如 M-估计和最小中值平方)不同,RANSAC 是由计算机视觉社区内部开发的。
RANSAC 是一种重采样技术,通过使用估计基础模型参数所需的最小观察数(数据点)来生成候选解决方案。正如 Fischler 和 Bolles [1] 指出,与使用尽可能多的数据来获得初步解决方案然后剔除离群值的传统采样技术不同,RANSAC 使用最小的可能集合,然后使用一致的数据点扩展这个集合 [1]。
基本算法RANSAC概述如下:
-
随机选择确定模型参数所需的最小点数。
-
求解模型参数。
-
确定所有点集中有多少点符合预定的容差 。
-
如果集合中内点的数量与总点数的比例超过预定阈值 ,则使用所有识别的内点重新估计模型参数并终止。
-
否则,重复步骤 1 到 4(最多 次)。
迭代次数 的选择足够高,以确保至少有一个随机样本集不包含离群值的概率 (通常设为 0.99)。设 表示任何选定数据点为内点的概率, 表示观察到离群值的概率。需要进行 次最小点数 的迭代,其中
因此,通过一些操作得到:
有关基本 RANSAC 公式的更多详细信息,请参见 [1, 2]。RANSAC 的扩展包括使用最大似然框架 [4] 和重要性采样 [3]。
原文参见:https://www.cse.yorku.ca/~kosta/CompVis_Notes/ransac.pdf
RANSAC算法的数学原理可以概括如下:
-
随机抽样:从点云数据中随机选择若干点作为样本。
-
模型拟合:使用选定的样本点拟合模型。
-
一致性检验:计算拟合模型的所有点的误差,确定与模型一致的点(内点)。
-
模型优化:重复上述步骤多次,选择内点最多的模型作为最终模型。
假设我们要拟合一个平面模型,平面方程为:
RANSAC的具体步骤如下:
-
从点云数据中随机选择三个点,设为, 和。
-
计算平面模型参数 , , 和
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 2147
2147

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









