




点云配准(point cloud registration)的目的是将多个三维点云数据集对齐,以形成一个统一的三维模型。其应用范围广泛,包括机器人定位与导航、三维重建、逆向工程、医学成像、环境感知等。点云配准过程可详细划分为初始对齐、最近点查找、变换矩阵计算、应用变换和误差评估。通过这些阶段的迭代优化,最终实现点云的精确对齐。
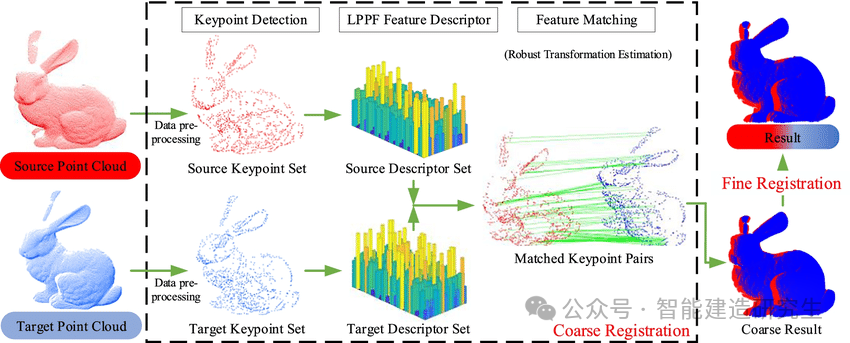
点云的粗配准(coarse registration)是指通过快速但不精确的方法,对两个点云进行初步对齐,使它们的大致位置和方向一致;精配准(fine registration)则是在粗配准的基础上,使用精确但计算量较大的算法,如ICP(Iterative Closest Point),对点云进行细致调整,以达到高精度的对齐。
点云配准的本质是通过几何变换(包括旋转、平移等)将一个点云的数据坐标系对齐到另一个点云的数据坐标系下,使得两组点云在同一坐标系中精确对齐,从而实现对物体或场景的统一描述和分析。
ICP(Iterative Closest Point)算法是计算机视觉和三维计算机图形学中常用的一种点云配准算法。该方法可以分为点到点(point-to-point)和点到面(point-to-plane)两类:点到点ICP通过最小化源点云和目标点云对应点之间的欧氏距离来计算变换矩阵,而点到面ICP则通过最小化源点云点到目标点云表面的距离,更适用于目标点云具有较好平滑表面的情况,从而提高配准的精度和鲁棒性。
算法发展历史
ICP算法最早由Besl和McKay在1992年提出,用于解决两个点云之间的配准问题。该算法的核心思想是通过迭代优化,将源点云逐步变换,使其与目标点云对齐。随着时间的推移,许多研究者对ICP算法进行了改进,以提高其精度和效率。主要的发展历程如下:
-
1992年 - Besl和McKay提出了经典的ICP算法。
-
1994年 - Chen和Medioni提出了一种基于局部平面的ICP改进方法。
-
1997年 - Zhang提出了一个改进的最近点搜索算法,使用k-d树加速最近点查找。
-
2002年 - Rusinkiewicz和Levoy提出了多种ICP的变体,优化了算法的效率。
-
近年来 - 随着点云数据量的增加和计算能力的提升,研究者们在ICP基础上引入了并行计算、GPU加速等技术,使得ICP算法能够处理更大规模的点云数据。
数学原理
基本思想
ICP算法的基本思想是通过迭代优化源点云到目标点云的变换,使得源点云与目标点云之间的误差最小化。具体步骤如下:
-
初
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 15万+
15万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









