【从零手写VIO】——概述与课程介绍——回顾与基础
最新推荐文章于 2023-05-22 20:34:39 发布





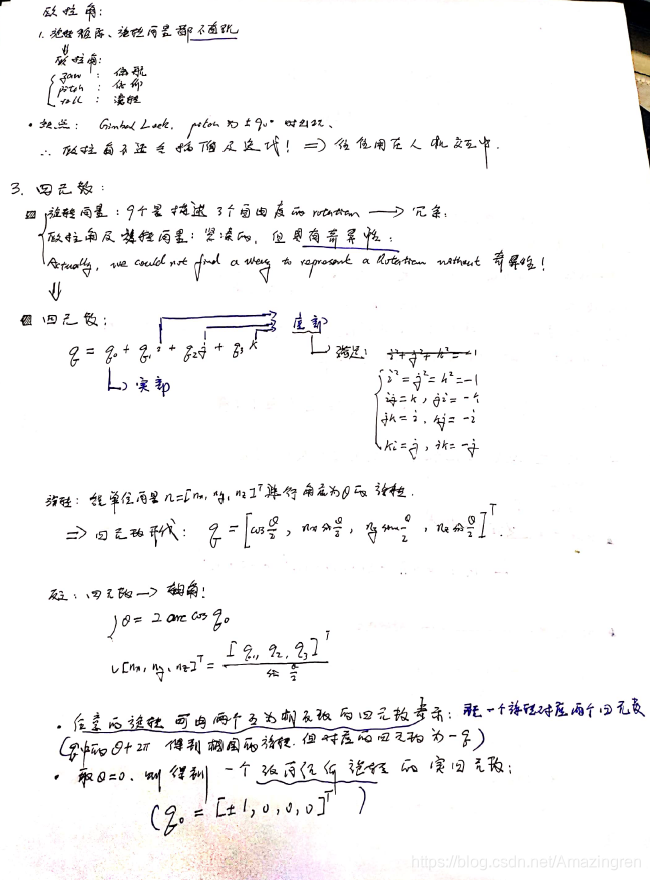
 本文介绍了从零开始编写视觉惯性里程计(VIO)课程的内容,主要包括三维刚体运动的约定和四元数的基础知识。在三维刚体运动部分,提到了坐标系的定义;在四元数部分,阐述了四元数如何描述旋转矩阵,并讲解了四元数的乘法和时间导数。作者对回顾部分的表述质量表示不满,期望后续内容能有所改进。
本文介绍了从零开始编写视觉惯性里程计(VIO)课程的内容,主要包括三维刚体运动的约定和四元数的基础知识。在三维刚体运动部分,提到了坐标系的定义;在四元数部分,阐述了四元数如何描述旋转矩阵,并讲解了四元数的乘法和时间导数。作者对回顾部分的表述质量表示不满,期望后续内容能有所改进。
本文介绍了从零开始编写视觉惯性里程计(VIO)课程的内容,主要包括三维刚体运动的约定和四元数的基础知识。在三维刚体运动部分,提到了坐标系的定义;在四元数部分,阐述了四元数如何描述旋转矩阵,并讲解了四元数的乘法和时间导数。作者对回顾部分的表述质量表示不满,期望后续内容能有所改进。
本文介绍了从零开始编写视觉惯性里程计(VIO)课程的内容,主要包括三维刚体运动的约定和四元数的基础知识。在三维刚体运动部分,提到了坐标系的定义;在四元数部分,阐述了四元数如何描述旋转矩阵,并讲解了四元数的乘法和时间导数。作者对回顾部分的表述质量表示不满,期望后续内容能有所改进。
 2847
4812
213
2847
4812
213

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























