




在金属增材制造领域,效率与质量的平衡始终是行业突破的终极命题。当传统高斯光束因能量过度集中引发熔池气孔、飞溅等问题时,当大层厚打印被迫在效率与缺陷间妥协时,汉邦激光坚持核心技术的持续创新突围,研发推出光驰Ⅱ型技术。这项从底层重构激光能量法则的技术,不仅实现了高斯光与环状光的独立/并行精准调控,更通过智能化策略协同,让工业用户以"光路"破解精密与批产的双重挑战。
光驰II型技术
重构金属增材制造的底层逻辑
传统高斯光束因能量呈中心峰值分布的特性,易导致熔池中心过热引发飞溅与孔隙缺陷,同时边缘能量不足造成粉末未完全熔合。相比常规高斯光束,汉邦激光光驰Ⅱ技术通过能量分布的动态优化,大幅减少飞溅现象,为金属增材制造提供更稳定的工艺基础。光驰Ⅱ型技术通过高斯光与点环光自由切换打印实现精准调控,既能在批量生产时固定点环光能量配比以提升大尺寸零件效率,又可结合超精细光斑完成复杂结构的高精度成形。通过跳层打印、抽壳打印等高自由度策略的协同配合,进一步突破效率与精细化的传统矛盾。
一机双效,智能切换“精”与“快”
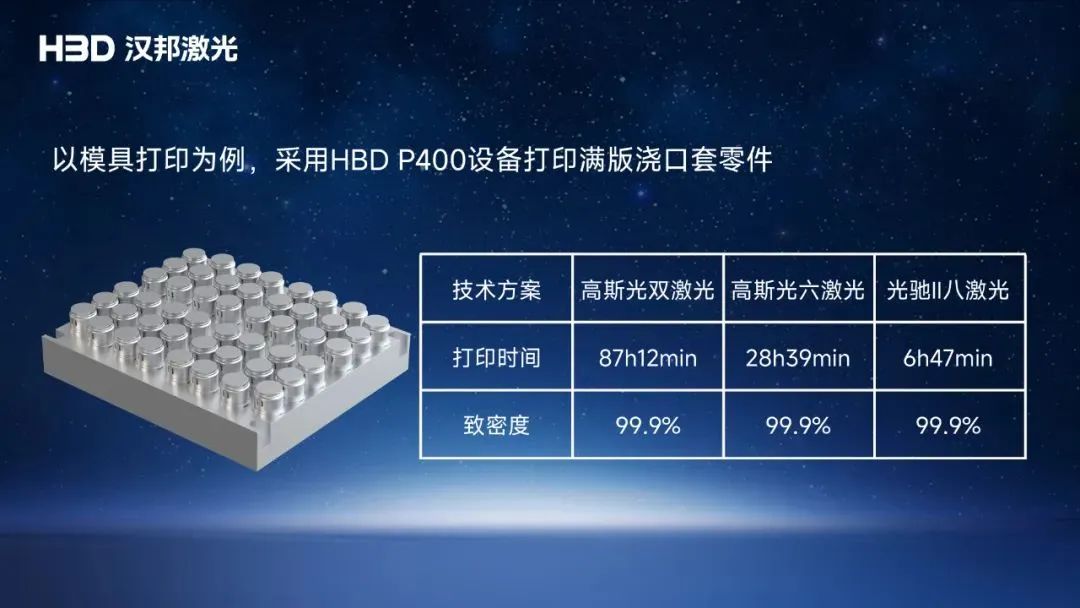
HBD P400设备搭载光驰Ⅱ型技术,首次实现高斯光、点环光模式无缝切换。通过环形光斑能量优化,同层厚打印效率直接翻倍,配合大层厚工艺(最高300μm),零件生产周期大大缩短;光驰Ⅱ型技术精准抑制飞溅缺陷,材料致密度提升至99.9%,品质稳居行业标杆。更革新性实现“普通功率高效烧结”——等量激光器工作下,设备能耗降低,维护成本锐减,以更少投入解锁更快速度、更优质量,真正实现“降本增效一体化”。
高精度模式:专攻超精细打印(10-40μm)层厚,适配医疗器械、精密电子器件;
高效量产模式:点环光+大层厚(300μm)策略,满足汽车制造、工业模具批量化生产;

以模具打印为例,采用HBD P400设备打印满板浇口套零件:
光驰Ⅱ型技术作为3D打印领域技术跃升的核心推动力之一,正在重新定义金属增材制造的边界。汉邦激光光驰Ⅱ型技术以创新应用的八激光协同系统为核心,不仅攻克了传统工艺中效率与质量难以兼得的行业痛点,为工业级用户提供了从精密微件到大批量生产的全场景解决方案。
欢迎转发
千人行业专家交流Q群:248112776
延伸阅读:
1.重磅!金石三维战略牵手上市公司汇纳科技,打造“3D打印+AI+算力”生态布局
4.高性能复材3D打印新突破:连续碳纤维高密度3D路径生成技术


















 96
96

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









