



 本文解析了如何通过相机位姿变换,将世界坐标系的三维点转换为相机坐标系下的点,随后进行透视投影,将它们映射到二维裁剪空间。介绍了投影矩阵的推导过程,涉及相机内参、相似三角形原理及具体公式。
本文解析了如何通过相机位姿变换,将世界坐标系的三维点转换为相机坐标系下的点,随后进行透视投影,将它们映射到二维裁剪空间。介绍了投影矩阵的推导过程,涉及相机内参、相似三角形原理及具体公式。
世界坐标系下的点坐标,经过相机位姿变换之后,得到的相机坐标系下的点坐标,依然是三维空间中的点坐标,通过投影变换将其映射至二维空间坐标。
透视投影
透视投影将相机坐标系下的空间点映射至新的坐标空间,将相机坐标系下的视锥体,重映射成单位正方体的裁剪空间。视锥空间以外的点,全部作为无效点,也不会被投影至剪裁空间。
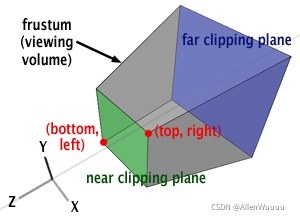
** 相机坐标系中原点是透镜 **
投影变换矩阵
其中近端剪裁平面的角点以及
,近端裁剪平面和远端裁剪平面深度分别为
和
。
相机坐标系点经过透视投影后对应的裁剪空间点
,透视投影过程如下:
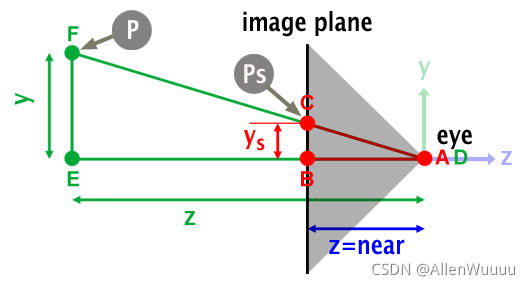
推导
相机坐标系下点
在投影平面(近端剪裁平面)上的投影点
,根据相似三角形关系
又
,即
同理
构造齐次坐标
按照上式,希望得到A和B
解得
所以最终的投影变换矩阵
相机内参构建透视投影矩阵
相机内参矩阵
可以根据相机内参矩阵,计算出相机成像平面在相机坐标系下的位置。
记图像尺寸,算出成像平面尺寸
,近端剪裁平面尺寸
。成像平面与剪裁平面满足相似三角形关系:
即
同理
求得

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









