




第一部分:从内存物理结构看数组的本质
1. 计算机的“记忆”:内存(RAM)
想象一下,你的计算机内存(RAM)并不是一个神秘的黑盒子,而是一条无限长的、笔直的街道。
-
单元格(Cell): 这条街上有一排排的“小房子”。在计算机中,每一个“小房子”只能存放 1个字节(Byte = 8 bits) 的数据。
-
地址(Address): 为了能找到这些房子,每个房子都有一个唯一的门牌号。
-
第1个房子的地址是
0x0000 -
第2个房子的地址是
0x0001 -
...以此类推。
-
关键点: 计算机访问内存是“随机访问”(Random Access)的。这意味着,计算机读取地址 0x0000 的数据,和读取地址 0x9999 的数据,花费的时间是完全一样的。这一特性是数组高效的物理基础。
2. 数据的“体型”
在这一长排房子里,如果我们要住进去不同的“人”(数据类型),占用的空间是不一样的:
-
char (字符): 很瘦,只需要 1 个字节(占用 1 个房子)。
-
int (整数): 比较胖,通常需要 4 个字节(连续占用 4 个房子)。
-
double (双精度浮点数): 很壮,通常需要 8 个字节(连续占用 8 个房子)。
从底层看变量: 当你声明一个整数 int a = 10; 时,操作系统会在内存街上找 4 个空闲的连续房子(比如地址 100 到 103),把 10 这个数字的二进制形式塞进去,然后记下:“变量 a 住在门牌号 100”。
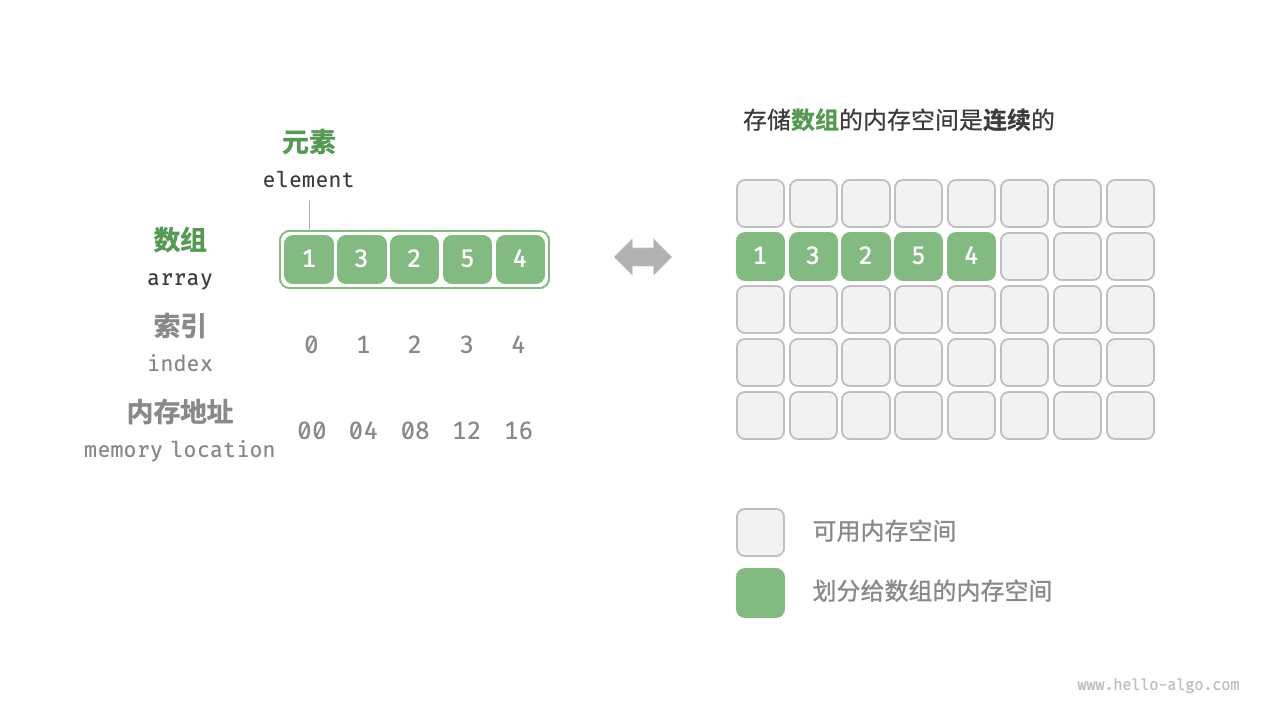
3. 数组的诞生:强迫症式的“连续居住”
现在,我们终于可以定义什么是数组了。
从计算机组成原理的角度看,数组只有两个铁律:
-
同构性: 所有元素必须是相同类型(大家占用的空间必须一样大,比如都是
int)。 -
连续性: 所有元素在内存中必须紧挨着排列,中间不能有空隙。
假设我们要创建一个包含 3 个整数的数组:int arr[3]。
-
计算机首先问:“一个整数占多大?” 答案是 4 字节。
-
计算机接着算:“你要 3 个?那就是
个字节。”
-
计算机去内存街上寻找一块连续的、长度为 12 个字节的空地。
假设它找到了从地址 2000 开始的空地。那么内存布局如下:
| 数组下标 (Index) | 内存实际地址 (Memory Address) | 存储内容 | 备注 |
| arr[0] | 2000 | 整数的第1部分 | 基地址 (Base Address) |
| 2001 | ... | ||
| 2002 | ... | ||
| 2003 | 整数的第4部分 | arr[0] 结束 | |
| arr[1] | 2004 | 整数的第1部分 | |
| 2005 | ... | ||
| ... | ... | ||
| arr[1] | 2007 | 整数的第4部分 | arr[1] 结束 |
| arr[2] | 2008 | 整数的第1部分 | |
| ... | ... | ||
| arr[2] | 2011 | 整数的第4部分 | arr[2] 结束 |
4. 为什么数组下标从 0 开始?(核心数学原理)
很多初学者困惑,为什么不是 arr[1] 代表第一个元素?
这是因为数组的下标(Index),在底层逻辑里,代表的不是“第几个”,而是偏移量(Offset)。

还记得我们之前说的吗?访问内存是非常快的。当我们想要访问 arr[2] 时,计算机不需要从头去数,它直接用一个公式算出地址:
带入我们的例子:
-
Base_Address (基地址): 2000 (即数组头部地址)
-
Index (下标): 2
-
Size_of_Element (元素大小): 4 字节
计算机直接算出 2008,然后瞬间飞到那个地址去读取数据。
如果是从 1 开始计数会怎样?
公式就会变成:
看到那个 (Index - 1) 了吗?这意味着计算机每次访问数组都要多做一次减法运算。对于极度追求效率的底层硬件来说,这多余的一次指令是不可接受的浪费。
5. 数组的优缺点(基于硬件原理)
基于上面的结构,我们就能深刻理解它的特性:
-
优点:查询神速(随机访问)。
不管数组有一万个元素还是一个元素,访问 arr[9999] 和 arr[0] 的时间是一样的,因为只需要做一次乘法和一次加法就能算出地址。这在算法中被称为 $O(1)$ 时间复杂度。
-
优点:CPU 缓存友好(Cache Locality)。
这是进阶原理:CPU 读取内存时,不是只读 1 个字节,而是会把邻近的一块数据(Cache Line)都读进 CPU 缓存。因为数组是连续的,当你读 arr[0] 时,arr[1]、arr[2] 可能已经被顺手读进 CPU 缓存了,下次访问它们时速度会快几十倍。
-
缺点:插入和删除极慢。
如果你想在 arr[0] 和 arr[1] 之间插一个新的数字,因为内存必须是连续的,你必须把 arr[1] 及其后面所有的元素全部往后挪一个位置,给新来的腾地儿。这就像在一排紧挨着的书架中间硬塞一本书,后面的书都得动。
-
6.数组操作
初始化数组:
# 初始化数组
arr: list[int] = [0] * 5 # [ 0, 0, 0, 0, 0 ]
nums: list[int] = [1, 3, 2, 5, 4]
访问元素:
def random_access(nums: list[int]) -> int:
"""随机访问元素"""
# 在区间 [0, len(nums)-1] 中随机抽取一个数字
random_index = random.randint(0, len(nums) - 1)
# 获取并返回随机元素
random_num = nums[random_index]
return random_num
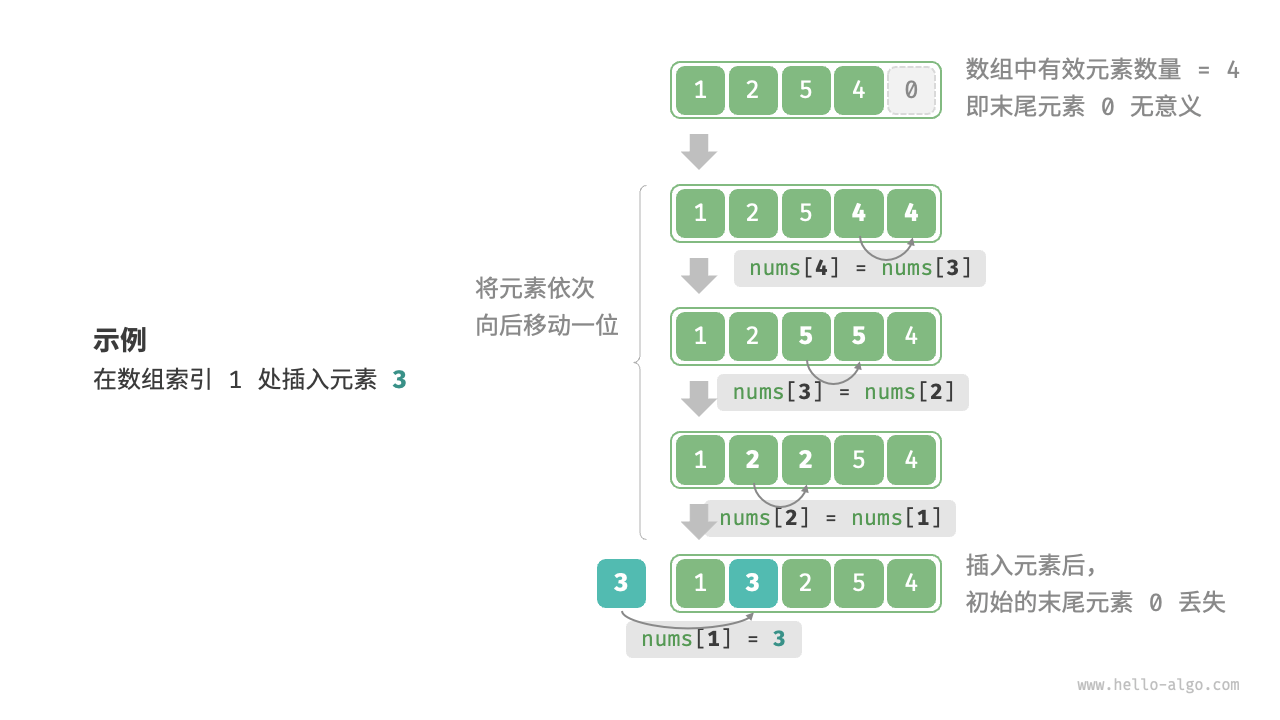
插入元素:
def insert(nums: list[int], num: int, index: int):
"""在数组的索引 index 处插入元素 num"""
# 把索引 index 以及之后的所有元素向后移动一位
for i in range(len(nums) - 1, index, -1):
nums[i] = nums[i - 1]
# 将 num 赋给 index 处的元素
nums[index] = num
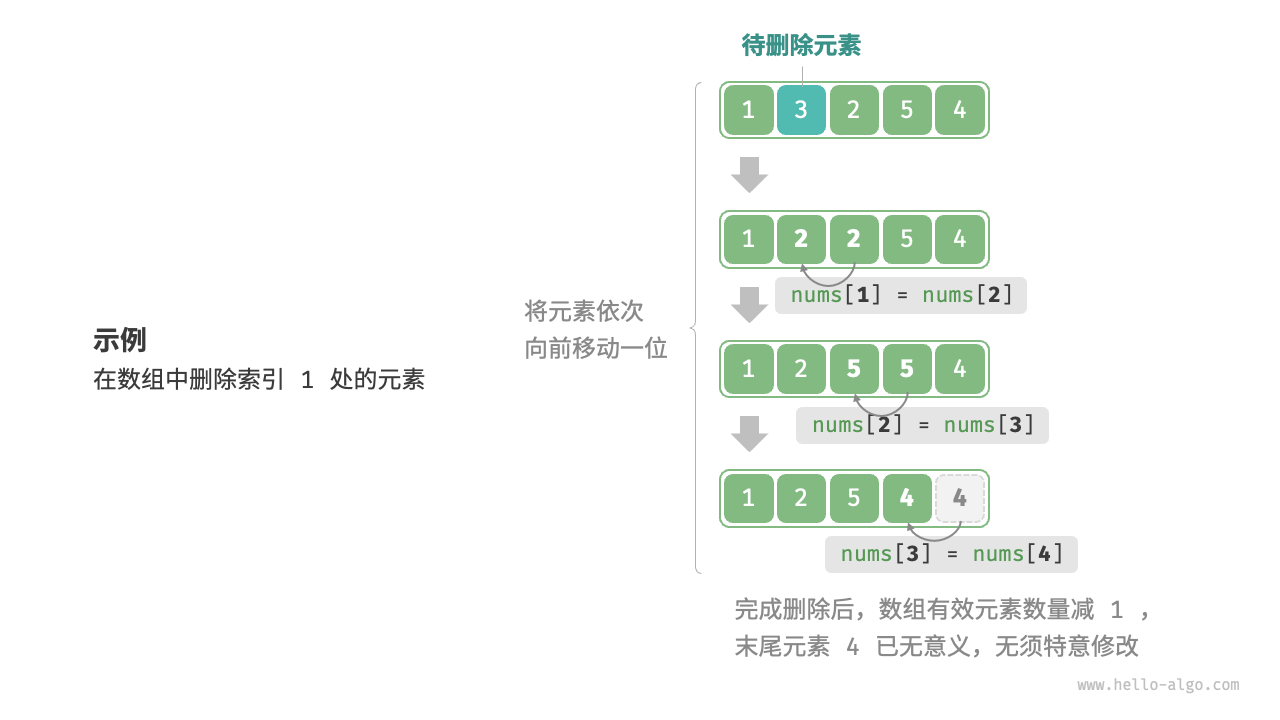
删除元素
def remove(nums: list[int], index: int):
"""删除索引 index 处的元素"""
# 把索引 index 之后的所有元素向前移动一位
for i in range(index, len(nums) - 1):
nums[i] = nums[i + 1]
遍历数组
def traverse(nums: list[int]):
"""遍历数组"""
count = 0
# 通过索引遍历数组
for i in range(len(nums)):
count += nums[i]
# 直接遍历数组元素
for num in nums:
count += num
# 同时遍历数据索引和元素
for i, num in enumerate(nums):
count += nums[i]
count += num
查找元素:
def find(nums: list[int], target: int) -> int:
"""在数组中查找指定元素"""
for i in range(len(nums)):
if nums[i] == target:
return i
return -1
扩容数组
在复杂的系统环境中,程序难以保证数组之后的内存空间是可用的,从而无法安全地扩展数组容量。因此在大多数编程语言中,数组的长度是不可变的。
如果我们希望扩容数组,则需重新建立一个更大的数组,然后把原数组元素依次复制到新数组。这是一个O(n)的操作,在数组很大的情况下非常耗时。代码如下所示:
def extend(nums: list[int], enlarge: int) -> list[int]:
"""扩展数组长度"""
# 初始化一个扩展长度后的数组
res = [0] * (len(nums) + enlarge)
# 将原数组中的所有元素复制到新数组
for i in range(len(nums)):
res[i] = nums[i]
# 返回扩展后的新数组
return res
7.数组典型的运用
数组是一种基础且常见的数据结构,既频繁应用在各类算法之中,也可用于实现各种复杂数据结构。
- 随机访问:如果我们想随机抽取一些样本,那么可以用数组存储,并生成一个随机序列,根据索引实现随机抽样。
- 排序和搜索:数组是排序和搜索算法最常用的数据结构。快速排序、归并排序、二分查找等都主要在数组上进行。
- 查找表:当需要快速查找一个元素或其对应关系时,可以使用数组作为查找表。假如我们想实现字符到 ASCII 码的映射,则可以将字符的 ASCII 码值作为索引,对应的元素存放在数组中的对应位置。
- 机器学习:神经网络中大量使用了向量、矩阵、张量之间的线性代数运算,这些数据都是以数组的形式构建的。数组是神经网络编程中最常使用的数据结构。
- 数据结构实现:数组可以用于实现栈、队列、哈希表、堆、图等数据结构。例如,图的邻接矩阵表示实际上是一个二维数组。
第一部分总结
从计算机组成原理来看,数组就是一块固定的、连续的内存区域。它的本质是用空间换时间——通过严格的排列限制,换取了极致的访问速度。我们可以初始化一个比较长的数组,只用前面一部分,这样在插入数据时,丢失的末尾元素都是“无意义”的,但这样做会造成部分内存空间浪费。
值得注意的是,由于数组的长度是固定的,因此插入一个元素必定会导致数组尾部元素“丢失”。我们将这个问题的解决方案留在“列表”章节中讨论。、
第二部分:动态扩容和引用存储
但是你可能会问:这不对啊!我在 Python 里写 ls = [],然后疯狂 append 往里塞数据,从来不需要管它多大,而且我还能往同一个数组里塞整数、字符串和对象。这是怎么回事?
1. 静态数组 vs. 动态数组(扩容的骗局)
在最底层的 C 语言(接近硬件)中,数组是“静态”的。
-
场景: 你申请了
int arr[3]。 -
内存: 操作系统给了你 12 个字节(3个整数的空间)。
-
危机: 现在你想存第 4 个数字。
-
结果: 内存溢出(Overflow)。你后面的内存地址可能住着别人的数据(比如操作系统的核心代码),你如果硬塞进去,程序会直接崩溃,甚至导致系统蓝屏。
为了解决这个问题,Python 的 list、Java 的 ArrayList、C++ 的 vector 引入了动态数组的概念。它们表面上看起来可以无限增长,其实背后在干“搬家”的苦力活。
幕后的“搬家”算法:
当你创建一个空数组时,Python 可能会悄悄预定一小块内存(比如能装 4 个位置)。
-
填满: 当你填入第 5 个元素时,数组满了。
-
寻找新房: 解释器(Python 的大脑)会立刻去内存街上找一块更大的空地。通常是原来大小的 1.125 倍或 1.5 倍(不同语言策略不同,假设是 2 倍)。
-
复制(Copy): 解释器把旧房子里的 4 个元素,一个一个复制到新房子里。
-
销毁: 释放(删掉)旧房子的数据,把那块地还给操作系统。
-
插入: 终于把第 5 个元素放进新房子的空位里。
性能代价:
这就是为什么有时候 append 操作会突然变慢。平时插入是 O(1)(直接放进去),但一旦触发“搬家”,复杂度瞬间飙升到 O(N)(因为要复制 N 个旧数据)。
2. 怎么在这个“连续”的数组里存不同类型的数据?
这也是一个巨大的思维陷阱。
我在第一部分说过:数组要求所有元素大小必须一致(方便计算地址偏移量)。
-
int是 4 字节。 -
string可能几百字节。 -
Image对象可能几兆字节。
如果 Python 允许 ls = [1, "hello", image_obj],这三个东西大小完全不一样,那是怎么挤在同一个“连续”数组里的?
答案:它是“指针数组” (Array of Pointers)
Python 里的列表(List),实际上存的不是数据本身,而是数据的地址(门牌号)。
我们再回到内存街:
数据区(分散在各处):
数字 1 被扔在内存地址 0x500。
字符串 "hello" 被扔在内存地址 0x800。
对象 image 被扔在内存地址 0x900。
数组区(连续整齐): 你的 ls 数组,在内存中确实是连续的,但它里面存的内容是统一大小的地址卡片(在64位计算机上,一个地址通常占 8 字节)。
| 数组下标 | 内存实际内容 (存储的是地址) | 指向哪里? |
ls[0] | 0x500 | 指向数字 1 |
ls[1] | 0x800 | 指向字符串 "hello" |
ls[2] | 0x900 | 指向对象 |
优点(灵活性): 数组本身只需要维护整齐的“地址”,它不管地址指向的房子里住的是大象还是蚂蚁。这就是为什么 Python 列表可以存任何东西。
缺点(CPU 缓存失效 - Cache Miss): 还记得第一部分说的“CPU 缓存友好”吗?
C 语言数组(紧凑): 数据 1, 2, 3 紧挨着。CPU 一把抓过来,吃得很快。
Python 列表(引用): 数组里只有地址。CPU 读 ls[0],拿到地址,跑到 0x500 去读数据;接着读 ls[1],拿到地址,又要跑到 0x800 去读数据。
后果: 这种跳来跳去的读取方式,打破了内存的局部性原理。CPU 必须频繁地等待内存响应,导致处理大规模数值计算时,Python 原生列表比 C 语言数组慢几十倍甚至上百倍。
第二部分总结
从计算机组成原理的视角来看:
-
并没有真正的“无限”数组: 所谓的无限增长,只是底层在不断地“申请更大内存 -> 搬家 -> 销毁旧家”。
-
并没有真正的“混合”数组: 所谓的混合类型,只是数组里存了一堆“地址指针”,指向了散落在内存各处的数据实体。
这也是为什么在 AI 和深度学习(如 PyTorch, TensorFlow, NumPy)中,我们绝对不会使用 Python 原生的 List 来做计算。我们会使用 Tensor(张量) 或 NumPy Array。
为什么?因为 Tensor 重新回归了第一部分的原则:它强制要求数据类型单一(比如全都是 float32),并且在内存中紧凑排列。只有这样,GPU 和 CPU 才能全速运转,进行大规模矩阵运算。
第三部分:多维数组的谎言 —— 内存是线性的
1. 内存没有“维度”
在你的代码里,你可能写过 int matrix[3][3],把你脑海中的数据想象成一个像围棋棋盘一样的 3x3 网格。
但在计算机的物理层面上,二维数组根本不存在。
还记得第一部分讲的吗?内存是一条无限长的、笔直的街道(线性的一维结构)。计算机的硬件设计里没有“换行”这个概念,只有地址 0, 1, 2, 3, 4, ...。
所以,要在一个只有一维的内存条上存一个二维的矩阵,我们必须把这个矩阵“拍扁”,拉成一条直线。
这就引出了两种流派,决定了数据在底层是如何“拉直”的:行优先(Row-Major) 和 列优先(Column-Major)。
2. 行优先(Row-Major)—— C/C++, Python (NumPy) 的选择
这是最符合人类阅读习惯的方式:先填满第一行,再接第二行。
假设我们有一个 的数组(2行,3列):
内存里的实际排列:
计算机先把第一行 A, B, C 塞进内存,紧接着把第二行 D, E, F 塞进去。
| 内存地址 | 0x100 | 0x104 | 0x108 | 0x10C | 0x110 | 0x114 |
| 存储数据 | A | B | C | D | E | F |
| 逻辑坐标 | [0,0] | [0,1] | [0,2] | [1,0] | [1,1] | [1,2] |
底层寻址公式(核心数学):
如果我要访问 matrix[i][j](第 i 行,第 j 列),计算机怎么算出它在直直的内存街上的地址?
-
:意思是“跳过前面的
整行”。
-
:意思是“在当前行再往后走
步”。
3. 列优先(Column-Major)—— Fortran, MATLAB, R 的选择
虽然 C 语言统治了世界,但在古老的科学计算领域(如 Fortran),它们选择把矩阵竖着切。
同样的矩阵:
内存里的实际排列:
先存第一列 A, D,再存第二列 B, E,最后存第三列 C, F。
| 内存地址 | 0x100 | 0x104 | 0x108 | 0x10C | 0x110 | 0x114 |
| 存储数据 | A | D | B | E | C | F |
| 逻辑坐标 | [0,0] | [1,0] | [0,1] | [1,1] | [0,2] | [1,2] |
如果你在 Python (行优先) 和 MATLAB (列优先) 之间传递数据,或者调用一些古老的线性代数库(如 BLAS/LAPACK),如果不注意这一点,你的矩阵就会转置(行列颠倒),导致计算结果完全错误。
4. 性能生死线:为什么循环的顺序很重要?
这一节是所有程序员进阶的分水岭。理解了它,你就能写出比别人快几倍的代码。
假设我们有一个巨大的二维数组 arr[10000][10000],我们要遍历它求和。
写法 A(行遍历):
// 外层是行,内层是列
for(int i=0; i<10000; i++) {
for(int j=0; j<10000; j++) {
sum += arr[i][j];
}
}
写法 B(列遍历):
// 外层是列,内层是行
for(int j=0; j<10000; j++) {
for(int i=0; i<10000; i++) {
sum += arr[i][j]; // 注意这里下标变化的是 i
}
}
在数学上,A 和 B 是一样的。 在计算机底层,A 比 B 快几十倍 甚至更多。
原因:CPU 缓存行(Cache Line)与空间局部性
回到第一部分的知识:CPU 读内存不是一个字节一个字节读的,而是一次“抓一把”(通常是 64 字节,称为一个 Cache Line)。
对于写法 A(行优先):
-
当 CPU 读
arr[0][0]时,它很聪明地把arr[0][0]到arr[0][15](假设 int 是4字节,64/4=16个)全读进缓存了。 -
接下来计算
arr[0][1]到arr[0][15]时,CPU 不需要再访问慢速的内存条,直接从高速缓存拿数据。 -
结果: 极高的缓存命中率(Cache Hit)。
对于写法 B(列优先):
-
你先读
arr[0][0]。CPU 把arr[0][0]...arr[0][15]读进缓存。 -
但你下一个要读的是
arr[1][0]! -
arr[1][0]在哪里?它在内存里距离arr[0][0]非常远(隔了一整行,也就是隔了 10000 个数据)。 -
CPU 刚才辛辛苦苦读进来的
arr[0][1]...完全没用到,就被迫扔掉,去加载arr[1][0]所在的新位置。 -
结果: 每一步都在“跳跃”。这就叫 Cache Thrashing(缓存颠簸)。CPU 大部分时间都在等内存条数据传输,而不是在计算。
5. 特别补充:Python List 的特殊情况
在 C 语言或 NumPy (np.array) 中,二维数组确实是一块连续的内存。
但是,普通的 Python List ([[1,2], [3,4]]) 并不是真正的二维数组,它是 "数组的数组" (Array of Arrays)。
-
外层 List
ls存了两个指针(地址)。 -
第一个指针指向一块内存(存了
[1, 2])。 -
第二个指针指向另一块完全不相关的内存(存了
[3, 4])。
这两块内存不一定是连续的。所以在 Python 原生 List 里,行优先虽然也有优势,但不如 C/NumPy 中那么极其显著,因为无论怎么走,你都要进行两次“指针跳转”。
第三部分总结
-
物理无维度: 所有的多维数组在底层都是一维的。
-
映射规则: 行优先(Row-Major)是主流,但在跨语言交互时要小心列优先(Column-Major)。
-
性能铁律: 永远顺着内存布局的方向遍历数组。对于 C/C++/Java/NumPy,请务必把内层循环对应最右边的下标。
第四部分:数组越界与缓冲区溢出——危险的游戏
1. 数组本身没有“边界感”
在 Python 或 Java 中,如果你写 arr[10] 但数组只有 5 个元素,程序会立刻报错 IndexError 或 ArrayIndexOutOfBoundsException。
你会觉得这是理所当然的。但在计算机底层(C语言/汇编语言)看来,这简直是多管闲事。
还记得那个寻址公式吗?
关键点: 这个公式只是单纯的数学计算。
-
如果你有一个长度为 3 的数组,基地址在
1000。 -
你想访问下标
100的元素。 -
计算机底层会毫不犹豫地计算:
。
-
然后,CPU 会直接伸出手去抓地址
1400的数据。
CPU 根本不关心、也不知道那个数组只有 3 个元素长。 它只负责执行指令。
这就像你住酒店,定的是 101 号房。但你拿了一把万能钥匙(指针),非要去开 105 号房的门。如果酒店保安(编译器/运行时环境)不拦着你,你就能进去。
2. 读取越界:看到了不该看的东西
如果你运气好,访问越界也许只是读到了一些乱码。 但在极端情况下,这会导致信息泄露(Heartbleed 漏洞)。
著名的 Heartbleed(心脏滴血) 漏洞,本质上就是利用了数组(缓冲区)读取越界。
-
黑客对服务器说:“我发给你单词 'BIRD'(4个字母),请你把这个单词原样回传给我。”
-
黑客实际发出的指令是:“这是 'BIRD',但我要你回传 64KB 的数据。”
-
服务器单纯地运用了数组逻辑,从 'BIRD' 所在的内存地址开始,往后读取了 64KB 的连续内存。
-
这 64KB 的内存里,可能刚好存着别人的密码、私钥、信用卡号。
-
服务器把这些机密数据一股脑发给了黑客。
3. 写入越界:缓冲区溢出攻击(Buffer Overflow)
读取只是泄密,写入越界(Overwrite)则能控制计算机。
为了理解这一点,我们需要稍微了解一下栈内存(Stack Memory)的结构。当程序运行一个函数时,数据在内存里是这样紧挨着排放的:
| 内存地址(从低到高) | 存放内容 | 作用 |
| 0x100 - 0x107 | char buffer[8] | 你的局部数组变量 |
| 0x108 - 0x10B | 其他变量 | 函数里的其他整数 |
| 0x10C - 0x10F | 返回地址 (Return Address) | 这就是命门! |
什么是“返回地址”? 当函数执行完后,CPU 需要知道下一步该去哪里继续执行代码。这个“下一步的地址”就保存在栈上,紧紧贴着你的局部变量数组。
攻击演示:
假设你的代码里有一个只能装 8 个字符的数组 buffer[8],用来存用户名。
-
正常情况: 用户输入 "User"(4个字)。它乖乖地待在
0x100到0x103。一切正常。 -
攻击开始: 黑客输入了一串精心设计的、超长的字符串,由 20 个字符组成。
-
覆盖发生:
-
前 8 个字符填满了
buffer。 -
第 9-12 个字符覆盖了“其他变量”。
-
第 13-16 个字符覆盖了“返回地址”!
-
黑客会把那个“返回地址”改写成一段恶意代码的内存地址。
-
夺取控制权: 当这个函数执行完毕,CPU 说:“好了,我该回家了,让我看看返回地址是多少。” 它读取了被篡改的地址,跳转了过去。 从此,程序不再按原计划运行,而是开始执行黑客注入的恶意代码(比如开启一个后门)。
这就是为什么 C/C++ 里的 strcpy (字符串复制) 函数被认为是极其危险的,因为它不检查数组边界。
4. 现代语言的“保镖”:性能的权衡
既然越界这么危险,为什么不修好它?
其实,现代语言(Python, Java, Go, Rust)都已经修好了。 它们引入了边界检查(Bounds Checking)。
在这些语言底层,每次你访问 arr[i] 时,代码实际上变成了这样:
// 伪代码:Python/Java 底层逻辑
if (i < 0 || i >= arr.length) {
throw new IndexError("越界啦!");
}
return memory[base + i * size];
代价是什么? 性能损耗。 每一次数组访问,都要多做一次 if 判断。
-
在一个循环 1 亿次的图像处理算法中,这意味着多做 1 亿次比较运算。
-
这就是为什么在极度追求性能的领域(操作系统内核、3A游戏引擎、高频交易),程序员依然偏爱 C/C++。他们宁愿承担风险,也要省去那个
if判断,换取极致的速度。
第四部分总结
从底层安全角度看:
-
裸奔的数组: 在最底层,数组没有任何防护,越界访问是自由的,也是致命的。
-
栈溢出: 数组越界不仅仅是数据错乱,它能覆盖程序的控制流(Return Address),让黑客接管电脑。
-
安全 vs 速度: 高级语言帮你挡住了子弹(IndexError),但也拿走了你奔跑的一点点速度。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









