




一、 核心思想:“把检测视为一个回归问题”
在YOLOv1之前,以R-CNN系列为代表的检测器都遵循一个两阶段(Two-Stage流程:
区域提议(Region Proposal):先找出上千个可能包含物体的候选框。
分类与精修(Classification & Refinement):再逐一判断这些候选框里是什么物体,并微调其位置。
这个过程非常缓慢。而YOLOv1的作者 Joseph Redmon 提出了一个了想法:我们为什么不直接在一个步骤里,同时预测出框的位置和类别呢?
YOLOv1的核心思想就是:将目标检测任务完全重新定义为一个单一的、端到端的回归问题(Regression Problem)。它对一张图片只看一次,就能直接回归出所有物体的边界框坐标和所属类别。
二、 架构原理
为了实现“看一次”就输出结果的目标,YOLOv1设计了一个简洁而巧妙的架构。
1. 网格系统 (The Grid System)
这是YOLOv1最核心、最基础的机制。
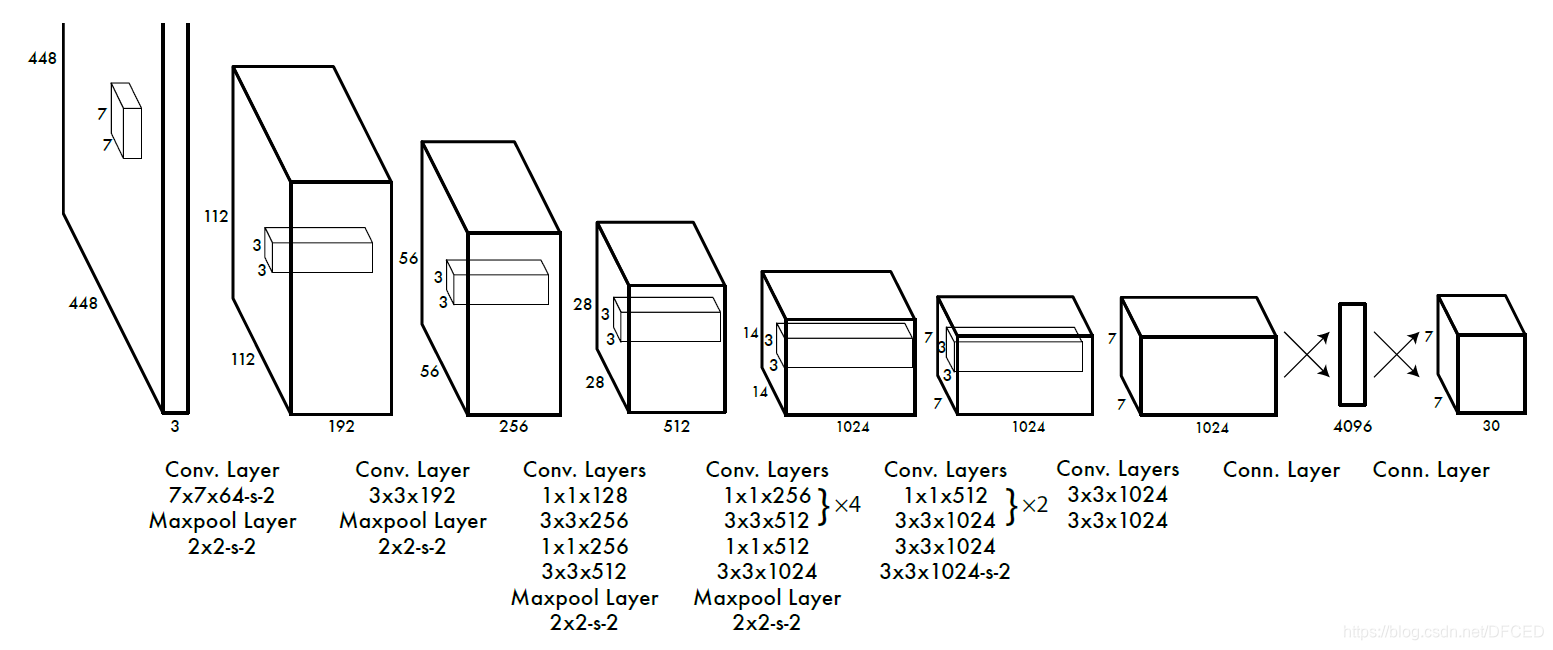
它将输入的图像统一缩放到 448x448 尺寸,然后逻辑上将其划分为一个 S x S 的网格(Grid),在论文中 S=7。
核心规则:如果一个物体的中心点(center)落入了某个网格单元(Grid Cell)内,那么这个网格单元就全权负责预测这一个物体。
这个规则是YOLOv1简洁性的来源,但也是其后续诸多局限性的根源。
2. 统一的网络结构
YOLOv1使用了一个单独的、统一的卷积神经网络(CNN)来完成所有工作。
灵感来源:其网络结构受到 GoogLeNet 的启发。
具体构成:它包含24个卷积层用于提取特征,以及2个全连接层用于进行最终的预测。没有复杂的组件,就是一路卷积到底,然后用全连接层输出一个大向量(张量)。
输出:网络的最终输出是一个形状为 S × S × (B × 5 + C) 的张量(Tensor)。这个张量包含了所有网格单元的预测信息。
三、 数学原理
这里的数学原理是课程的重点,我们将深入解析预测张量。
1. 预测张量 (The Prediction Tensor)
让我们来拆解这个 S × S × (B × 5 + C) 的输出张量。在YOLOv1论文中,S=7, B=2, C=20 (PASCAL VOC 数据集),所以输出是 7 x 7 x 30 的张量。
我们聚焦于其中一个网格单元,它需要预测一个长度为 B × 5 + C(即30)的向量。这个向量包含三组信息:
A. 边界框预测 (B个,每个5个值)
每个网格单元会预测 B 个(比如2个)候选的边界框。每个边界框用5个值来描述:(x, y, w, h, confidence)。
(x, y):预测框的中心点坐标。
注意:这个坐标是相对于其所在的网格单元的左上角进行归一化的,值在 [0, 1] 之间。例如,(0.5, 0.5) 表示中心点就在该网格单元的正中央。
(w, h):预测框的宽度和高度。
注意:这个宽高是相对于整张图像的尺寸进行归一化的,值在 [0, 1] 之间。例如,(0.5, 0.5) 表示框的宽高都是整张图的一半。
confidence:置信度。这是一个非常重要的值,它代表了这个预测框的“质量”,其数学定义是:

P(Object):表示这个框内包含一个物体的概率。
IoU:是预测框(pred)与真实物体框(truth)之间的交并比。
直观理解:如果框内没有物体,P(Object)=0,则置信度为0。如果框内有物体,P(Object)=1,则置信度就等于预测框与真实框的IoU。所以,置信度既反映了框内是否有物体的信心,也反映了框的位置有多准。
B. 类别概率 (C个值)
每个网格单元还会预测一组条件类别概率 (Conditional Class Probabilities):
这表示,在“该网格单元内包含一个物体”这个前提条件下,这个物体属于第 i 个类别的概率。它一共有 C 个值,对应 C 个类别。
推理时的最终得分: 在进行预测时,我们将上述两组信息相乘,得到每个边界框对于每个类别的最终得分:
四,实例演示
理论知识需要一个实例来巩固。
我们来一起走一遍完整的流程,看看YOLOv1是如何处理一张真实图片的。
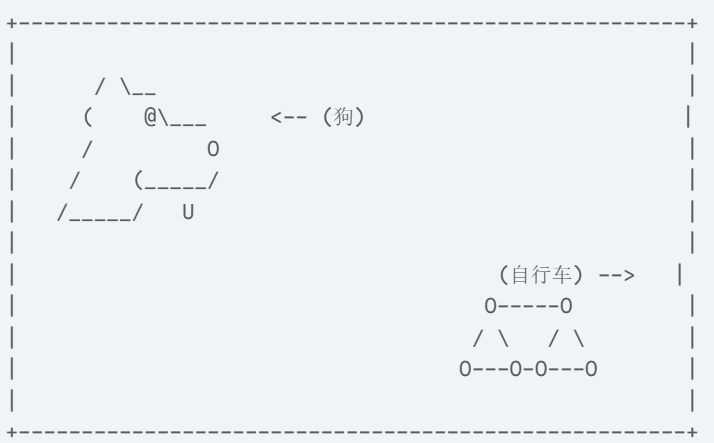
实例:检测一张包含“狗”和“自行车”的图片
假设我们有这样一张图片,左边有一只狗,右边有一辆自行车。
我们将使用YOLOv1的经典配置来进行分析:
输入尺寸:448 x 448
网格尺寸 (S):7 x 7
每个单元格预测的边界框数 (B):2
类别数 (C):20 (假设“狗”是第12类,“自行车”是第2类)
第一步:图像预处理与网格划分
首先,YOLO将这张原始图片强制缩放到 448 x 448 像素。
然后,它在逻辑上将这张 448x448 的图划分成一个 7x7 的网格。
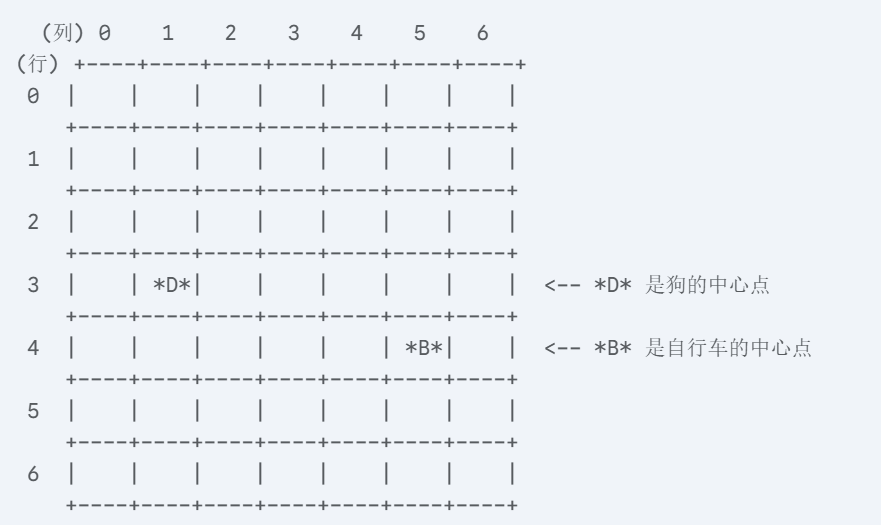
确定“负责”单元格:
狗的中心点落在了 (行=3, 列=1) 这个网格单元里。因此,(3, 1) 负责检测这只狗。
自行车的中心点落在了 (行=4, 列=5) 这个网格单元里。因此,(4, 5) 负责检测这辆自行车。
其他所有单元格,比如 (0, 0),都是背景,不负责检测任何物体。
第二步:网络前向传播
这张 448x448 的图片被送入YOLOv1的CNN网络。经过24个卷积层和2个全连接层后,网络最终输出一个 7 x 7 x 30 的巨大张量。这个张量就是我们的预测结果。
第三步:解读预测张量
现在,我们来“翻译”一下这个 7x7x30 张量里存储的信息。我们挑几个有代表性的单元格来看。
Case 1: 负责检测“狗”的单元格 (3, 1):
这个单元格对应的 1x1x30 向量,在理想情况下,应该包含以下信息:
边界框1 (B1) 的5个值:假设这个框预测得很好。
x, y: (0.6, 0.7) (狗的中心点在单元格偏右下角)
w, h: (0.30, 0.40) (狗的宽高约占整张图的30%和40%)
confidence: 0.95 (因为它框住了物体,且和真实框的IoU很高)
边界框2 (B2) 的5个值:这个框可能预测得不好。
x, y, w, h: (0.2, 0.3, 0.1, 0.1) (可能是任意值)
confidence: 0.05 (非常低的置信度,因为它没框住物体或IoU很低)
类别概率的20个值:
[0.01, 0.92, 0.01, ..., 0.98, ...] (第2类“自行车”的概率很低,第12类“狗”的概率非常高)
总的加起来就是30个数值正好对应30的维度了。
第四步:后处理 (得到最终结果)
网络输出的 7x7x2 = 98 个候选框还很原始,我们需要通过后处理来筛选出最终的结果。(因为每个网格会生成两个候选框,所以乘以2)
1.计算最终得分并进行阈值过滤:
对全部98个候选框,计算它们属于每个类别的最终得分:
Score(类别_i) = P(类别_i | Object) × confidence
例如,对于单元格(3,1)的B1框,它对“狗”的得分是 0.98 × 0.95 = 0.931。它对“自行车”的得分是 0.01 × 0.95 = 0.0095。
设定一个分数阈值(比如0.25)。所有类别的得分都低于这个阈值的框,全部被丢弃。
经过这一步,绝大多数来自背景区域的框和质量差的框都会被过滤掉。
2.非极大值抑制 (Non-Maximum Suppression, NMS):
经过上一步过滤,可能还剩下一些高度重叠的框。例如,对于狗,可能有一个得分0.93的大框和一个得分0.85的稍微小一点的框。
NMS算法会解决这个问题:
a. 在剩余的框中,选择得分最高的那个框(比如0.93的狗的框),将它作为最终结果之一。
b. 计算其他所有框与这个最高分框的IoU。
c. 如果IoU超过一个阈值(比如0.5),就认为它们检测的是同一个物体,将这些低分框丢弃。
d. 从未被处理的框中,再次选择得分最高的,重复以上过程,直到所有框都被处理完毕。
最终输出:
经过NMS后,我们就得到了干净、唯一的检测结果:
一个围绕着狗的、类别为“狗”的边界框。
一个围绕着自行车的、类别为“自行车”的边界框。
这个例子将我们之前讨论的抽象数学原理、网络结构与一个直观的检测过程联系了起来。



















 468
468

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









