




上次说到传统以太网为什么不具备实时性,这次聊一聊etherCAT的on the fly。
1.1 实时工业以太网
以太网的介质访问控制 MAC(Media Access Control)方式采用带有冲突检测的载波侦听多路访问机制 CSMA/CD(Carrier Sense Multiple Access with Collision Detection)。 这是一种非确定性的介质访问控制方式,不能满足工业现场总线的实时性要求。目前,市场上已有的实时工业以太网根据不同的实时性和成本要求使用不同的实现原理,大致可以分为以下三种类型,如图1.1 所示 。
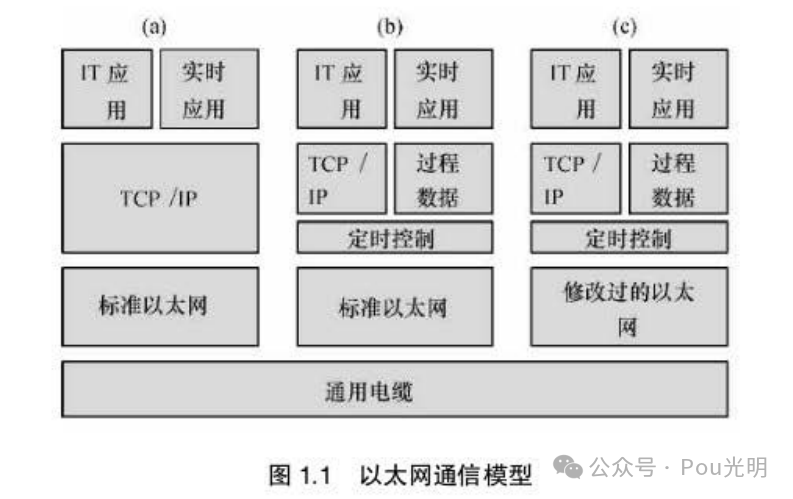
(1) 基于 TCP/IP 的实现(如因 1.1( a) 所示)
这种方式仍使用TCP/IP 协议栈,通过上层合理的控制来应对通信中非确定性因素。此时,实时网络可以与商用网络自由地通信。常用的通信控制手段有:合理调度,减少冲突的可能性 ; 定义数据帧的优先级,为实时数据分配最高的优先级 ; 使用交换式以太网等 。使用这种方式的典型协议有 ModbuslTCP 和 Ethemet/IP 等 。 这种方式不能实现很好的实时性,只适用于对实时性要求不高的工业过程自动化应用 。
(2) 基于以太网的实现(如图1.1( b) 所示 )
这种方式仍然使用标准的、未修改的以太网通信硬件,但是不使用 TCP/IP 来传输过程数据。 它引入了一种专门的过程数据传输协议,使用特定以太类型的以太网帧进行传输。T
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1920
1920

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









