




 本文介绍了光束法平差(BA)的基本概念及其在三维重建中的应用,详细阐述了重投影误差的概念,并探讨了几种优化算法,包括最速下降法、牛顿法和Levenberg-Marquardt法。
本文介绍了光束法平差(BA)的基本概念及其在三维重建中的应用,详细阐述了重投影误差的概念,并探讨了几种优化算法,包括最速下降法、牛顿法和Levenberg-Marquardt法。
文章目录
前言
Bundle Adjustment译为光束法平差或者束调整、捆绑调整。BA问题主要是对三维点位置和相机参数进行非线性优化,而我们可以把BA问题看成最小化重投影误差问题,同时这也是一个非线性最小二乘问题。
基础知识
重投影
由前面可知,我们可以通过特征点检测与匹配,得到多对特征匹配点,使用对极几何可以求得相机的位姿。由下面公式可得,我们可以通过空间点P的坐标求得空间点P投影在图像中的像素坐标,但是这个像素点坐标是先通过位姿估计,再通过公式计算出来的,相当于这个像素坐标是估算出来的。这个过程称为重投影。

重投影误差
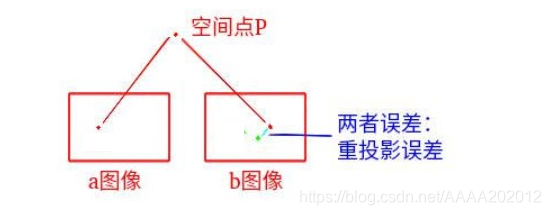
如果完全没有误差,那么两者的坐标是一样的,但这是不可能的,不管是实际测量出来的像素坐标还是通过位姿估算+重投影计算出来的像素坐标,都是有误差的,将实际值和估算值一减,就得到了重投影误差。
最小化重投影误差
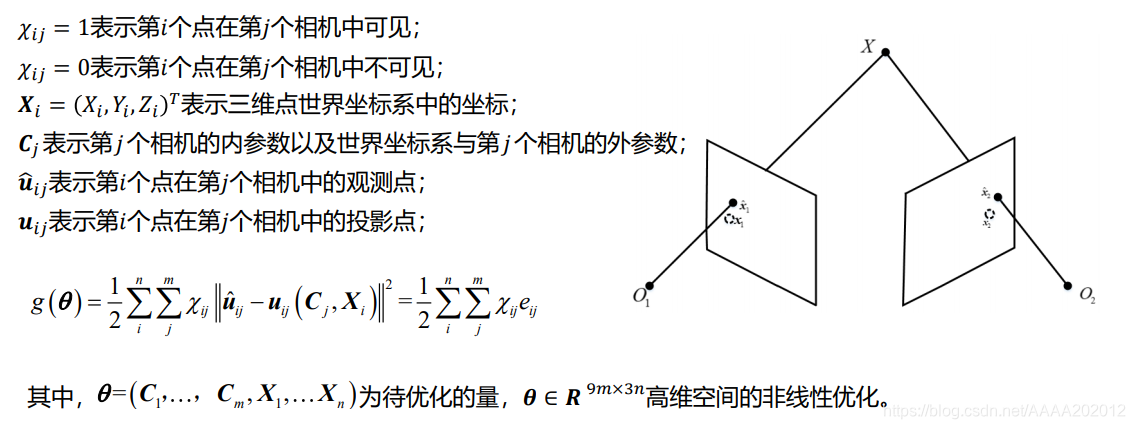
由于两张图片中有很多特征匹配点,将所有特征点重投影误差求和,取平方,再乘以1/2,这就构建了一个非线性最小二乘问题了,将里面的位姿、空间点作为优化的对象,最小化重投影误差,即得到一个优化后的结果,这就是所谓的BA。
无约束非线性最小优化问题

上述问题的最优解通常是指它的局部最优解,对初始值较为敏感,因此需要一个较好的初始值。
求解方法
BA问题被归结为一个非常大的非线性最小二乘问题,通常用Levenberg-Marquardt(LM)算法求解,但在介绍LM算法之前,分别介绍一下最速下降法和牛顿法。
最速下降法
算法介绍
在解决无约束问题时,经常用到的一类算法是最速下降法。
假设g( θ \theta θ)在 θ \theta θt处可微,则它在 θ \theta θt处有Taylor展开式为(略去高阶不计):

其中 θ \theta θ= θ \theta θt+ δ θ \delta\theta δθ
可以看到,当( ∇ \nabla ∇g( θ \theta θt))T δ θ \delta\theta δθ<0时可保证g( θ \theta θ)的值是在下降。
由 Δ \Delta Δg=g( θ \theta θ)- θ \theta θt=( ∇ \nabla ∇g( θ \theta θt))T δ θ \delta\theta δθ可见,函数变化量 Δ \Delta Δg为向量 ∇ \nabla ∇g( θ \theta θt)与 δ θ \delta\theta δθ的内积,根据向量内积的计算公式,得 Δ \Delta Δg=|| ∇ \nabla ∇g( θ \theta
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 479
479

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









