






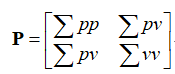
由于相同变量之间的协方差就是其方差,因此对角线上元素分别是p和v的方差,其余两个元素分别是两元素间的协方差,由于协方差部分次序,协方差矩阵式对称的。
在使用时协方差矩阵P是一个迭代更新的量,每一轮预测和更新后,P都会更新一个新的值,因此初始化时可以根据估计协定,不用太苛求初始化的精准度,因为随着几轮迭代会越来越趋紧真实值。
(二)过程误差协方差矩阵Q
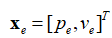
该矩阵的每一个元素分别是状态X的元素误差之间的协方差,以上文中的状态X为例,其包含位置p和速度v两个元素,其误差状态为:
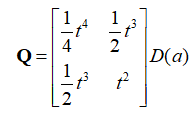
其Q矩阵可用下式表示:
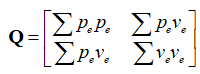
该矩阵是由不确定的噪声引起的,确定Q的各元素大小是不容易的,使用时都是具体问题具体分析,比方说针对上文中的小车的状态,误差来源是移动中的打滑等,最底层的是由于力的变化导致的加速度的变化,因此我们找到了加速度方差,就可以推导出Q矩阵,假设加速度方差是D(a)。
根据,
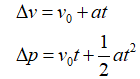
得到,
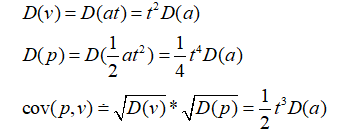
因此,
(三)测量噪声协方差矩阵R
测量噪声协方差的来源是传感器误差,即传感器的不准确性,在使用时一般传感器都会给出精度指标,该指标就可以直接转化到矩阵R中,还以上文小车为例,假设测量矩阵为下式所示:
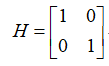
表示状态X中的位置p和速度v均可以测量,观测误差协方差矩阵R用下式表示:
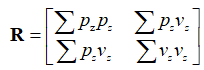
此时对角线上就是各测量量的测量方差,从传感器说明书上均可以读到,另外针对状态之间的协方差吐过确定不了就可以设为0,即可以如下设置:
(四)总结
- P矩阵可以根据状态方差估计,不用太最求准确度,因为P矩阵会随着迭代次数的增加而收敛到准确值;
- Q矩阵是状态转移预测过程由于外部干扰产生,移动机器人中可以运动加速度的方差来推导,此时只要估计一个加速度的方差即可;
- R矩阵是传感器测量的不准确度,每个每个传感器都会给出测量对向的准确度,直接转换就能用。

















 3772
3772

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









