







非局部均值滤波(Non-Local Means, NLM)是一种基于图像自相似性的去噪方法,广泛应用于图像增强和噪声去除领域。其核心思想是利用图像中非局部区域的相似性,通过对相似像素块进行加权平均来估计目标像素的真实值,从而有效去除噪声并保留图像的细节信息。
功能介绍:
去噪原理:
非局部均值滤波假设图像中的每个像素都可以通过与其周围非局部区域中相似像素的加权平均来重建。
它通过计算图像中不同像素块之间的相似度,为每个像素分配一个权重,权重越大表示相似度越高。最终,目标像素的值由这些相似像素的加权平均决定。
优势特点:
高效去噪:相比传统的局部滤波方法(如均值滤波、高斯滤波),NLM 能够更好地去除随机噪声,同时保留图像的边缘和纹理信息。
全局信息利用:传统滤波方法通常只考虑局部邻域,而 NLM 充分利用了图像的全局自相似性,特别适合处理具有重复结构的图像(如自然场景、纹理图像等)。
细节保护:由于其基于相似性加权的机制,NLM 在去噪过程中能够有效避免过度平滑,从而更好地保留图像的细节特征。
适用场景:
低光照图像增强:在弱光条件下拍摄的图像通常伴随大量噪声,NLM 滤波可以在提升亮度的同时有效抑制噪声。
医学影像处理:如 CT、MRI 等医学图像需要高精度的去噪处理,NLM 能够在去除噪声的同时保留重要的解剖结构。
遥感图像处理:遥感图像通常包含复杂的纹理和噪声,NLM 能够在去噪的同时保持地物特征的完整性。
参数调节:
用户可以通过调整滤波窗口大小、相似性权重参数和搜索范围等,灵活控制去噪效果与计算复杂度之间的平衡。
较大的搜索范围可以提高去噪效果,但会增加计算成本;较小的搜索范围则更适合实时处理。
扩展应用:
结合其他图像增强技术(如直方图均衡化、Retinex 算法等),可以进一步提升图像质量。
可以与其他去噪算法(如小波变换、BM3D 等)结合使用,形成混合去噪方案,以应对更复杂的噪声环境。
文章目录
非局部均值(Non-Local Means, NLM)滤波是一种有效的图像去噪方法,它利用图像中相似区域的信息来减少噪声。以下是一个基于Matlab实现的非局部均值滤波程序。
Matlab代码实现
function denoised_image = non_local_means_filter(noisy_image, patch_size, search_window, h)
% 非局部均值滤波函数
% 输入参数:
% noisy_image - 带噪声的输入图像 (灰度图像)
% patch_size - 用于计算相似性的邻域大小 (例如3x3)
% search_window - 搜索窗口大小 (例如11x11)
% h - 平滑参数,控制滤波强度
%
% 输出参数:
% denoised_image - 去噪后的图像
% 获取图像尺寸
[rows, cols] = size(noisy_image);
% 初始化输出图像
denoised_image = zeros(rows, cols);
% 扩展图像边界以处理边缘像素
extended_image = padarray(noisy_image, [patch_size patch_size], 'symmetric');
% 预计算权重归一化因子
normalization_factor = zeros(rows, cols);
% 遍历每个像素
for i = 1:rows
for j = 1:cols
% 当前像素位置
center_i = i + patch_size;
center_j = j + patch_size;
% 提取当前像素的邻域块
current_patch = extended_image(center_i-patch_size:center_i+patch_size, ...
center_j-patch_size:center_j+patch_size);
% 初始化权重和加权平均值
weighted_sum = 0;
total_weight = 0;
% 在搜索窗口内遍历
for m = max(1, i-search_window):min(rows, i+search_window)
for n = max(1, j-search_window):min(cols, j+search_window)
% 提取搜索窗口内的邻域块
search_i = m + patch_size;
search_j = n + patch_size;
search_patch = extended_image(search_i-patch_size:search_i+patch_size, ...
search_j-patch_size:search_j+patch_size);
% 计算两个邻域块之间的欧几里得距离
distance = sum((current_patch(:) - search_patch(:)).^2);
% 计算权重
weight = exp(-distance / (h^2));
% 累加权重和加权像素值
weighted_sum = weighted_sum + weight * extended_image(search_i, search_j);
total_weight = total_weight + weight;
end
end
% 计算加权平均值
denoised_image(i, j) = weighted_sum / total_weight;
normalization_factor(i, j) = total_weight;
end
end
% 归一化结果
denoised_image = denoised_image ./ normalization_factor;
end
—
使用示例
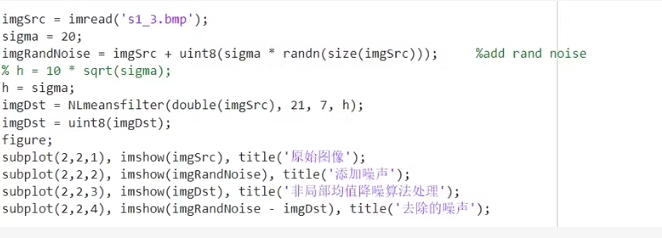
% 读取图像并添加噪声
original_image = im2double(imread('cameraman.tif')); % 示例图像
noisy_image = imnoise(original_image, 'gaussian', 0, 0.01); % 添加高斯噪声
% 参数设置
patch_size = 3; % 邻域块大小
search_window = 11; % 搜索窗口大小
h = 10; % 平滑参数
% 调用非局部均值滤波函数
denoised_image = non_local_means_filter(noisy_image, patch_size, search_window, h);
% 显示结果
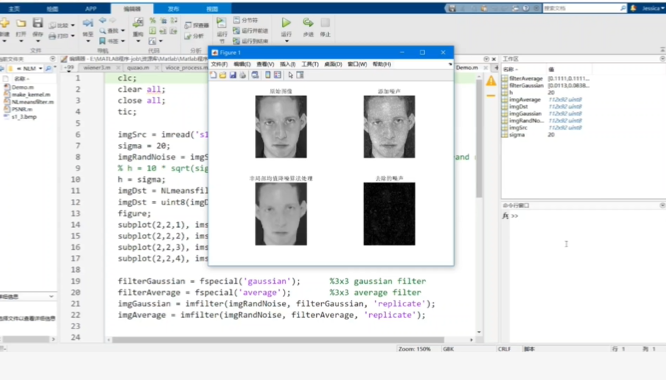
figure;
subplot(1, 3, 1), imshow(original_image), title('原始图像');
subplot(1, 3, 2), imshow(noisy_image), title('带噪声图像');
subplot(1, 3, 3), imshow(denoised_image), title('去噪后图像');
—
注意事项
- 性能优化:上述代码使用了双重循环,可能会导致运行速度较慢。对于更大的图像或更高的性能需求,可以考虑使用矩阵操作或GPU加速。
- 参数选择:
patch_size和search_window的大小会影响滤波效果。通常,patch_size设为3或5,search_window设为11或21。h是平滑参数,较大的值会导致更强的平滑效果,但可能丢失细节。
- 边界处理:代码中通过
padarray对图像边界进行了对称扩展,确保边缘像素也能被正确处理。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









