







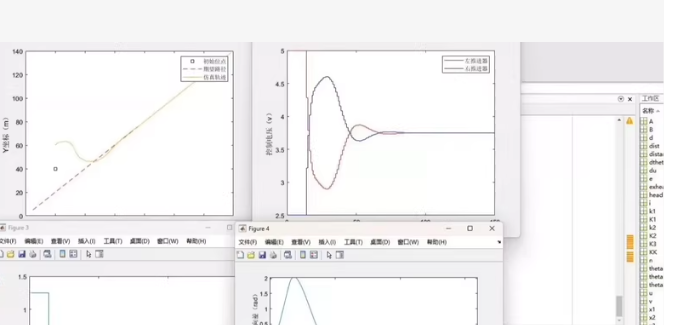
MATLAB路径规划仿真 轨迹规划,船舶轨迹跟踪控制,数学模
MATLAB路径规划仿真 轨迹规划,船舶轨迹跟踪控制,数学模型基于两轮差速的小车模型,用PID环节对航向角进行控制,迫使小车走向目标,或用PID环节对航向角和距离进行控制,迫使小车走向目标 LQR 算法
可自行小车起点坐标
文章目录
以下是基于两轮差速小车模型的路径规划和轨迹跟踪控制代码。我们将使用两种方法实现:
- PID控制:通过PID控制器对航向角进行控制,使小车走向目标。
- LQR算法:通过线性二次型调节器(LQR)优化控制输入,使小车跟踪目标轨迹。
1. 基于PID控制的轨迹跟踪
数学模型
两轮差速小车的动力学模型可以简化为:
[
\dot{x} = v \cos(\theta), \quad \dot{y} = v \sin(\theta), \quad \dot{\theta} = \frac{v}{L}(u_r - u_l)
]
其中:
- (x, y) 是小车的位置,
- (\theta) 是小车的航向角,
- (v) 是小车的速度,
- (L) 是轮距,
- (u_r, u_l) 是左右轮的速度。
我们可以将问题转化为通过PID控制器调整航向角误差,使小车朝向目标点。
Matlab代码
% PID控制的小车轨迹跟踪
clear; clc;
% 参数设置
dt = 0.1; % 时间步长
T = 20; % 总仿真时间
L = 0.5; % 小车轮距
v = 1.0; % 小车速度 (m/s)
% 初始状态 [x, y, theta]
state = [0; 0; 0]; % 起点坐标和初始航向角
target = [10; 10]; % 目标点坐标
% PID参数
Kp = 1.0;
Ki = 0.01;
Kd = 0.1;
% 初始化变量
x_history = state(1);
y_history = state(2);
theta_history = state(3);
integral_error = 0;
prev_error = 0;
for t = 0:dt:T
% 计算误差
dx = target(1) - state(1);
dy = target(2) - state(2);
target_angle = atan2(dy, dx); % 目标航向角
error = angle_diff(target_angle, state(3)); % 航向角误差
% PID控制
integral_error = integral_error + error * dt;
derivative_error = (error - prev_error) / dt;
omega = Kp * error + Ki * integral_error + Kd * derivative_error; % 角速度
% 更新状态
state(3) = state(3) + omega * dt; % 更新航向角
state(1) = state(1) + v * cos(state(3)) * dt; % 更新x
state(2) = state(2) + v * sin(state(3)) * dt; % 更新y
% 记录轨迹
x_history = [x_history, state(1)];
y_history = [y_history, state(2)];
theta_history = [theta_history, state(3)];
% 更新误差
prev_error = error;
end
% 绘制结果
figure;
plot(x_history, y_history, 'b-', 'LineWidth', 2);
hold on;
plot(target(1), target(2), 'ro', 'MarkerSize', 10, 'MarkerFaceColor', 'r');
xlabel('X Position (m)');
ylabel('Y Position (m)');
title('PID-Based Trajectory Tracking');
legend('Trajectory', 'Target');
grid on;
axis equal;
% 辅助函数:计算角度差
function diff = angle_diff(angle1, angle2)
diff = mod(angle1 - angle2 + pi, 2*pi) - pi;
end
2. 基于LQR算法的轨迹跟踪
数学模型
我们可以通过离散化的状态空间模型表示小车动力学:
[
\begin{bmatrix}
x_{k+1} \
y_{k+1} \
\theta_{k+1}
\end{bmatrix}
\begin{bmatrix}
1 & 0 & -v \sin(\theta_k) \Delta t \
0 & 1 & v \cos(\theta_k) \Delta t \
0 & 0 & 1
\end{bmatrix}
\begin{bmatrix}
x_k \
y_k \
\theta_k
\end{bmatrix}
+
\begin{bmatrix}
\cos(\theta_k) \Delta t \
\sin(\theta_k) \Delta t \
\frac{\Delta t}{L}
\end{bmatrix}
u_k
]
Matlab代码
% LQR控制的小车轨迹跟踪
clear; clc;
% 参数设置
dt = 0.1; % 时间步长
T = 20; % 总仿真时间
L = 0.5; % 小车轮距
v = 1.0; % 小车速度 (m/s)
% 初始状态 [x, y, theta]
state = [0; 0; 0]; % 起点坐标和初始航向角
target = [10; 10]; % 目标点坐标
% LQR权重矩阵
Q = diag([1, 1, 0.1]); % 状态权重
R = 0.1; % 控制输入权重
% 初始化变量
x_history = state(1);
y_history = state(2);
theta_history = state(3);
for t = 0:dt:T
% 计算误差
dx = target(1) - state(1);
dy = target(2) - state(2);
error = [dx; dy; angle_diff(atan2(dy, dx), state(3))];
% 离散化状态空间模型
A = [1 0 -v*sin(state(3))*dt; ...
0 1 v*cos(state(3))*dt; ...
0 0 1];
B = [cos(state(3))*dt; sin(state(3))*dt; dt/L];
% 计算LQR增益矩阵
K = dlqr(A, B, Q, R);
% 控制输入
u = -K * error;
% 更新状态
state = A * state + B * u;
% 记录轨迹
x_history = [x_history, state(1)];
y_history = [y_history, state(2)];
theta_history = [theta_history, state(3)];
end
% 绘制结果
figure;
plot(x_history, y_history, 'b-', 'LineWidth', 2);
hold on;
plot(target(1), target(2), 'ro', 'MarkerSize', 10, 'MarkerFaceColor', 'r');
xlabel('X Position (m)');
ylabel('Y Position (m)');
title('LQR-Based Trajectory Tracking');
legend('Trajectory', 'Target');
grid on;
axis equal;
% 辅助函数:计算角度差
function diff = angle_diff(angle1, angle2)
diff = mod(angle1 - angle2 + pi, 2*pi) - pi;
end
结果说明
- PID控制:适用于简单的航向角误差修正,适合初学者理解。
- LQR控制:通过优化状态和控制输入,提供更平滑的轨迹跟踪效果。
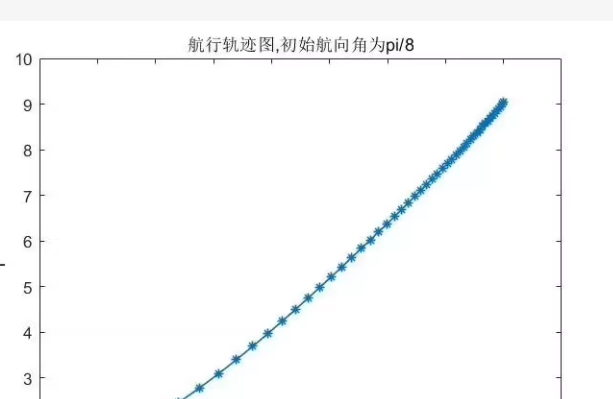
假设初始航向角为 (\pi/8)(约22.5度),目标点为 ((10, 10))。
% 参数设置
dt = 0.1; % 时间步长
T = 20; % 总仿真时间
L = 0.5; % 小车轮距
v = 1.0; % 小车速度 (m/s)
% 初始状态 [x, y, theta]
state = [0; 0; pi/8]; % 起点坐标和初始航向角
target = [10; 10]; % 目标点坐标
% PID参数
Kp = 1.0;
Ki = 0.01;
Kd = 0.1;
% 初始化变量
x_history = state(1);
y_history = state(2);
theta_history = state(3);
integral_error = 0;
prev_error = 0;
for t = 0:dt:T
% 计算误差
dx = target(1) - state(1);
dy = target(2) - state(2);
target_angle = atan2(dy, dx); % 目标航向角
error = angle_diff(target_angle, state(3)); % 航向角误差
% PID控制
integral_error = integral_error + error * dt;
derivative_error = (error - prev_error) / dt;
omega = Kp * error + Ki * integral_error + Kd * derivative_error; % 角速度
% 更新状态
state(3) = state(3) + omega * dt; % 更新航向角
state(1) = state(1) + v * cos(state(3)) * dt; % 更新x
state(2) = state(2) + v * sin(state(3)) * dt; % 更新y
% 记录轨迹
x_history = [x_history, state(1)];
y_history = [y_history, state(2)];
theta_history = [theta_history, state(3)];
% 更新误差
prev_error = error;
end
% 绘制结果
figure;
plot(x_history, y_history, 'b-', 'LineWidth', 2);
hold on;
plot(target(1), target(2), 'ro', 'MarkerSize', 10, 'MarkerFaceColor', 'r');
xlabel('X Position (m)');
ylabel('Y Position (m)');
title('PID-Based Trajectory Tracking');
legend('Trajectory', 'Target');
grid on;
axis equal;
% 辅助函数:计算角度差
function diff = angle_diff(angle1, angle2)
diff = mod(angle1 - angle2 + pi, 2*pi) - pi;
end
代码解释:
-
参数设置:
dt: 时间步长。T: 总仿真时间。L: 小车轮距。v: 小车速度。state: 初始状态[x, y, theta]。target: 目标点坐标。
-
PID参数:
Kp,Ki,Kd: 比例、积分、微分增益。
-
初始化变量:
x_history,y_history,theta_history: 存储轨迹历史。integral_error,prev_error: 积分误差和前一时刻的误差。
-
主循环:
- 计算当前位置到目标点的误差。
- 使用PID控制器计算角速度
omega。 - 更新小车的状态。
- 记录轨迹。
-
绘制结果:
- 绘制小车的轨迹和目标点。
-
辅助函数:
angle_diff: 计算两个角度之间的最小角度差。
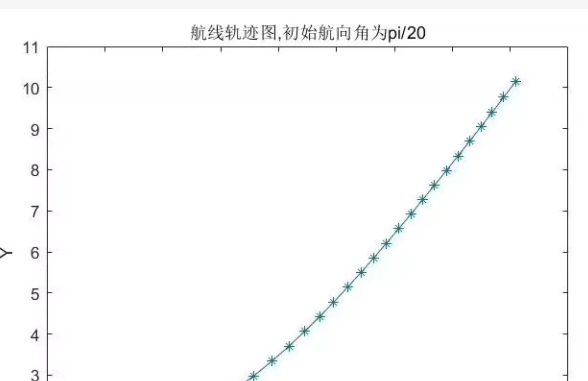
假设初始航向角为 (\pi/20)(约9度),目标点为 ((10, 10))。
以下是完整的MATLAB代码:
% 参数设置
dt = 0.1; % 时间步长
T = 20; % 总仿真时间
L = 0.5; % 小车轮距
v = 1.0; % 小车速度 (m/s)
% 初始状态 [x, y, theta]
state = [0; 0; pi/20]; % 起点坐标和初始航向角
target = [10; 10]; % 目标点坐标
% PID参数
Kp = 1.0;
Ki = 0.01;
Kd = 0.1;
% 初始化变量
x_history = state(1);
y_history = state(2);
theta_history = state(3);
integral_error = 0;
prev_error = 0;
for t = 0:dt:T
% 计算误差
dx = target(1) - state(1);
dy = target(2) - state(2);
target_angle = atan2(dy, dx); % 目标航向角
error = angle_diff(target_angle, state(3)); % 航向角误差
% PID控制
integral_error = integral_error + error * dt;
derivative_error = (error - prev_error) / dt;
omega = Kp * error + Ki * integral_error + Kd * derivative_error; % 角速度
% 更新状态
state(3) = state(3) + omega * dt; % 更新航向角
state(1) = state(1) + v * cos(state(3)) * dt; % 更新x
state(2) = state(2) + v * sin(state(3)) * dt; % 更新y
% 记录轨迹
x_history = [x_history, state(1)];
y_history = [y_history, state(2)];
theta_history = [theta_history, state(3)];
% 更新误差
prev_error = error;
end
% 绘制结果
figure;
plot(x_history, y_history, 'b-', 'LineWidth', 2);
hold on;
plot(target(1), target(2), 'ro', 'MarkerSize', 10, 'MarkerFaceColor', 'r');
xlabel('X Position (m)');
ylabel('Y Position (m)');
title('PID-Based Trajectory Tracking');
legend('Trajectory', 'Target');
grid on;
axis equal;
% 辅助函数:计算角度差
function diff = angle_diff(angle1, angle2)
diff = mod(angle1 - angle2 + pi, 2*pi) - pi;
end
代码解释:
-
参数设置:
dt: 时间步长。T: 总仿真时间。L: 小车轮距。v: 小车速度。state: 初始状态[x, y, theta]。target: 目标点坐标。
-
PID参数:
Kp,Ki,Kd: 比例、积分、微分增益。
-
初始化变量:
x_history,y_history,theta_history: 存储轨迹历史。integral_error,prev_error: 积分误差和前一时刻的误差。
-
主循环:
- 计算当前位置到目标点的误差。
- 使用PID控制器计算角速度
omega。 - 更新小车的状态。
- 记录轨迹。
-
绘制结果:
- 绘制小车的轨迹和目标点。
-
辅助函数:
angle_diff: 计算两个角度之间的最小角度差。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









