






本文简述使用自己电脑本地训练YOLOV5模型,并部署在树莓派上
机端环境部署
一、python环境搭建
先检查自己电脑是否有python以及它的版本
win+R打开运行窗口输入CMD
然后在命令符里输入python

可以看到我的版本是3.10的,如果没有的可以去官网下载https://www.python.org/
接下来是创建虚拟环境(可以使用anaconda这里就不在描述)
输入python -m venv yolov5 (yolov5是虚拟环境名字)
然后激活环境yolov5\Scripts\activate

最后这样即为成功创建虚拟环境
安装CUDA与cuDNN库
下载CUDA
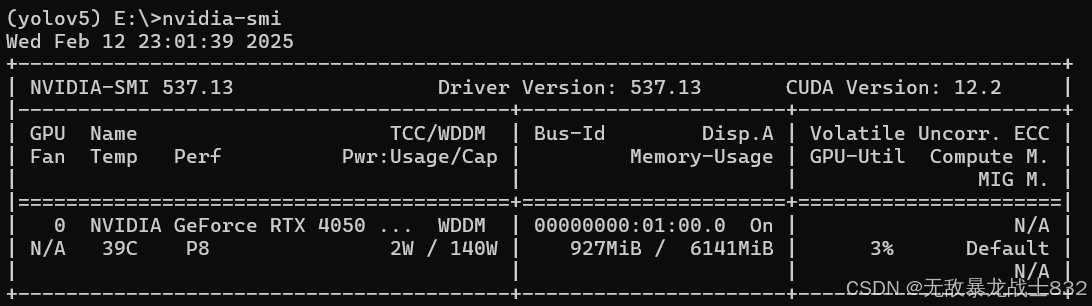
下载前需要确认自己的版本驱动
输入nvidia-smi查看CUDA版本号和驱动版本,我这里是12.2,驱动版本是537
下面是CUDA 工具包和 CUDA 次要版本兼容性所需的最低驱动程序版本
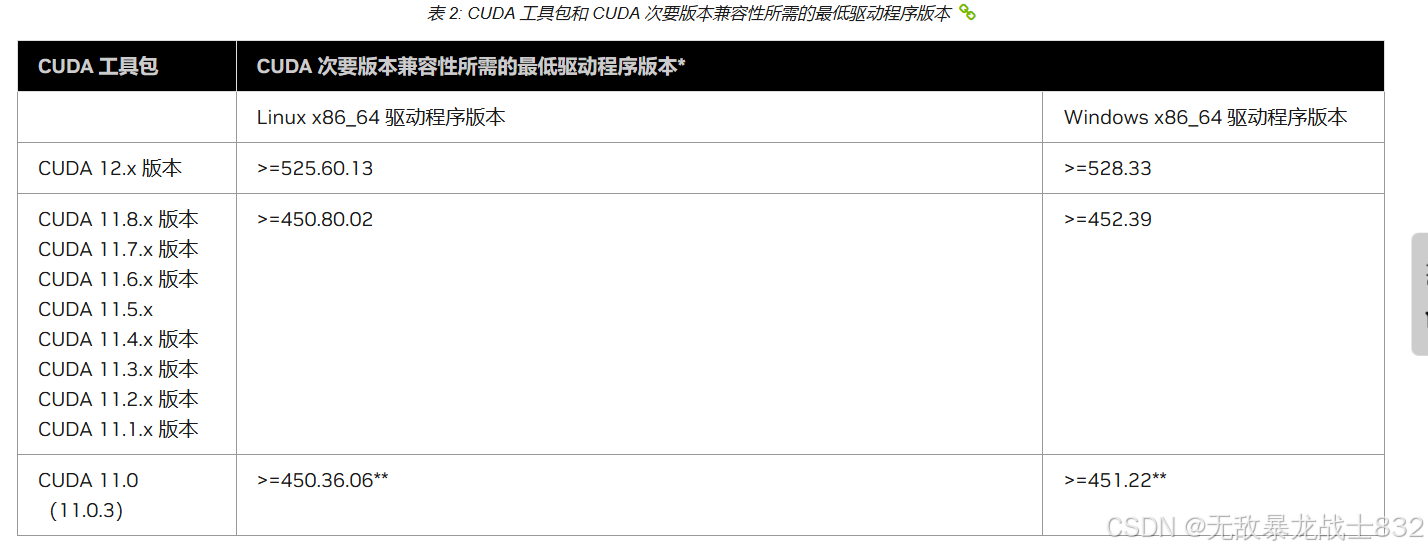
具体可前往官网查看https://docs.nvidia.com/cuda/cuda-toolkit-release-notes/index.html#id5
我这里选择12.1的下载链接https://developer.nvidia.com/cuda-toolkit-archive

建议选择自定义安装
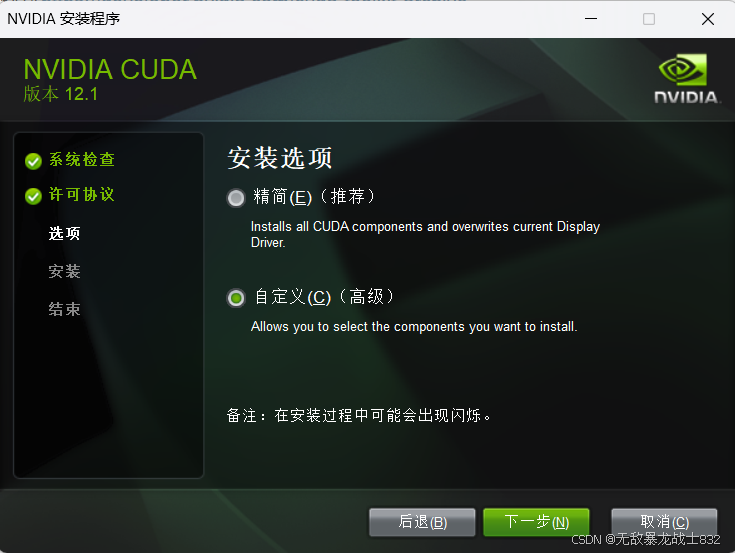
然后一直下一步即可
下载cuDNN
下载与CUDA版本对应的cuDNN版本可去文档查看https://developer.nvidia.com/rdp/cudnn-archive
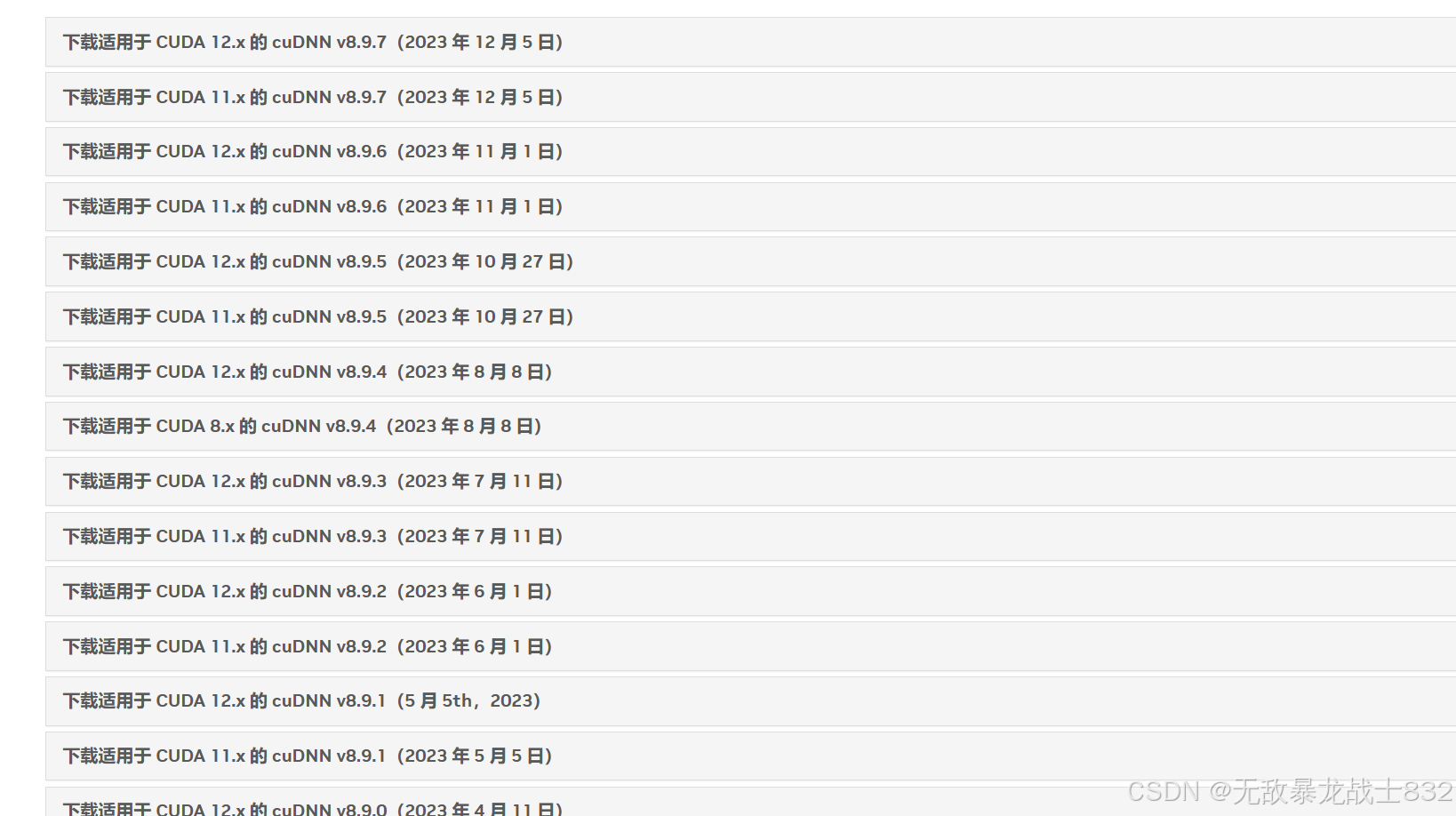
我这里选择v8.9.7的
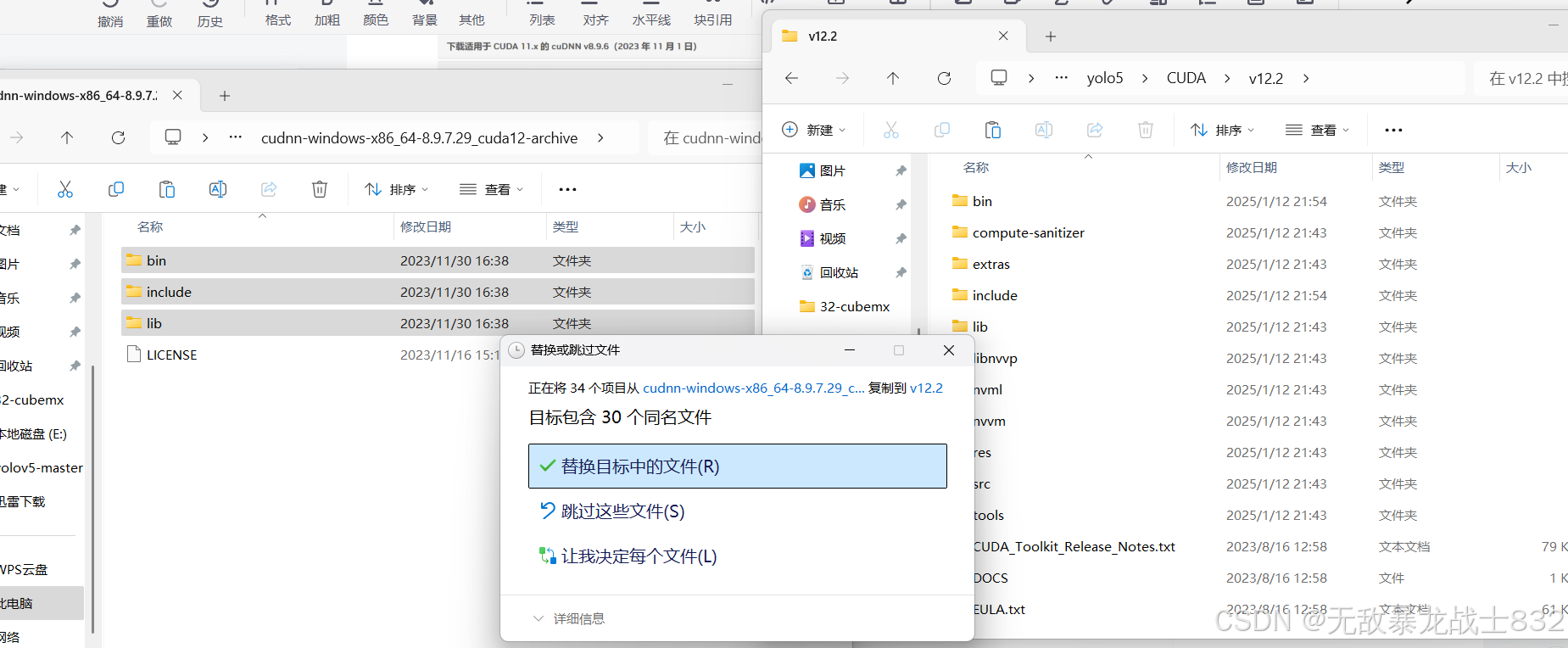
下载完成后,需要把cuDNN文件中的三个文件夹bin、include和lib复制到CUDA的安装目录
安装PyTorch
我选择的版本是2.5.1的,尽量版本不要太高,会出现兼容问题https://pytorch.org/get-started/previous-versions/

接下来验证安装
输入python后
import torch
torch.__version__
出现我这样及安装成功
下载YOLOV5
去官网下载https://github.com/ultralytics/yolov5我的是yolov5-7.0的
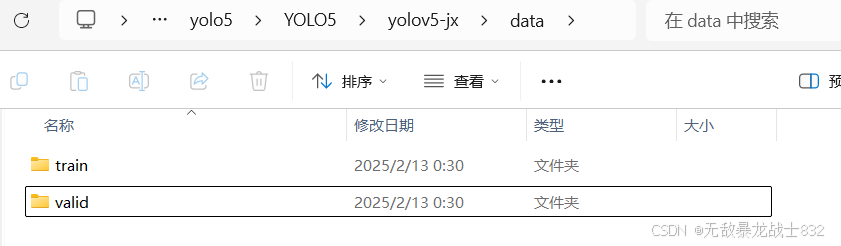
下载后解压在一个文件夹并在同级目录下创建data文件夹

在data里面创建train和valid两个文件夹
接着分别在这两个文件夹中创建images和labels两个文件夹
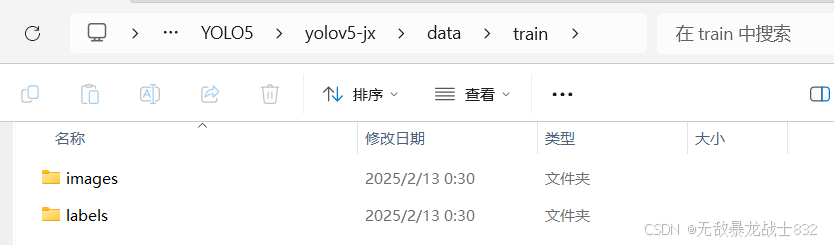
在images文件夹放入需要标注的照片(train:valid=9:1)
下载labelimg标注工具
进入下载地址:https://github.com/tzutalin/labelImg/releases,选择windows_v1.8.1.zip,下载并解压,直接双击exe文件即可打开。
勾选自动保存
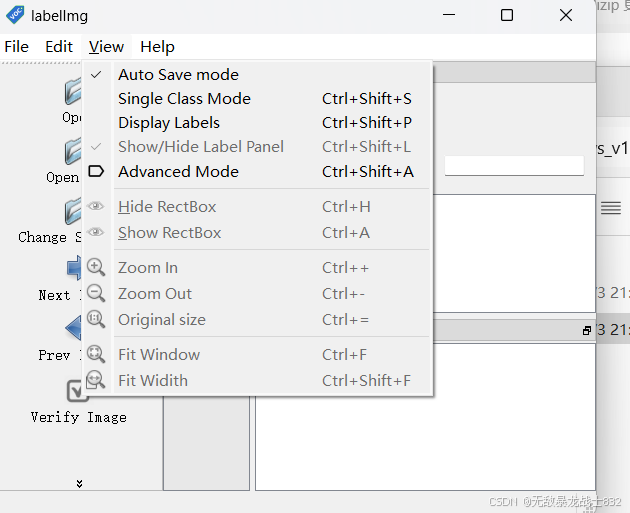
点击verify Image下面这个,使它变成YOLO
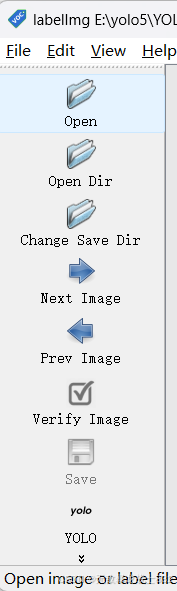
然后打开文件夹

保存路径为

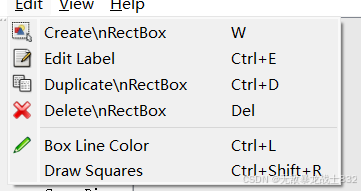
这些是快捷键
!!!注意valid下的图片也需要标注
训练前准备
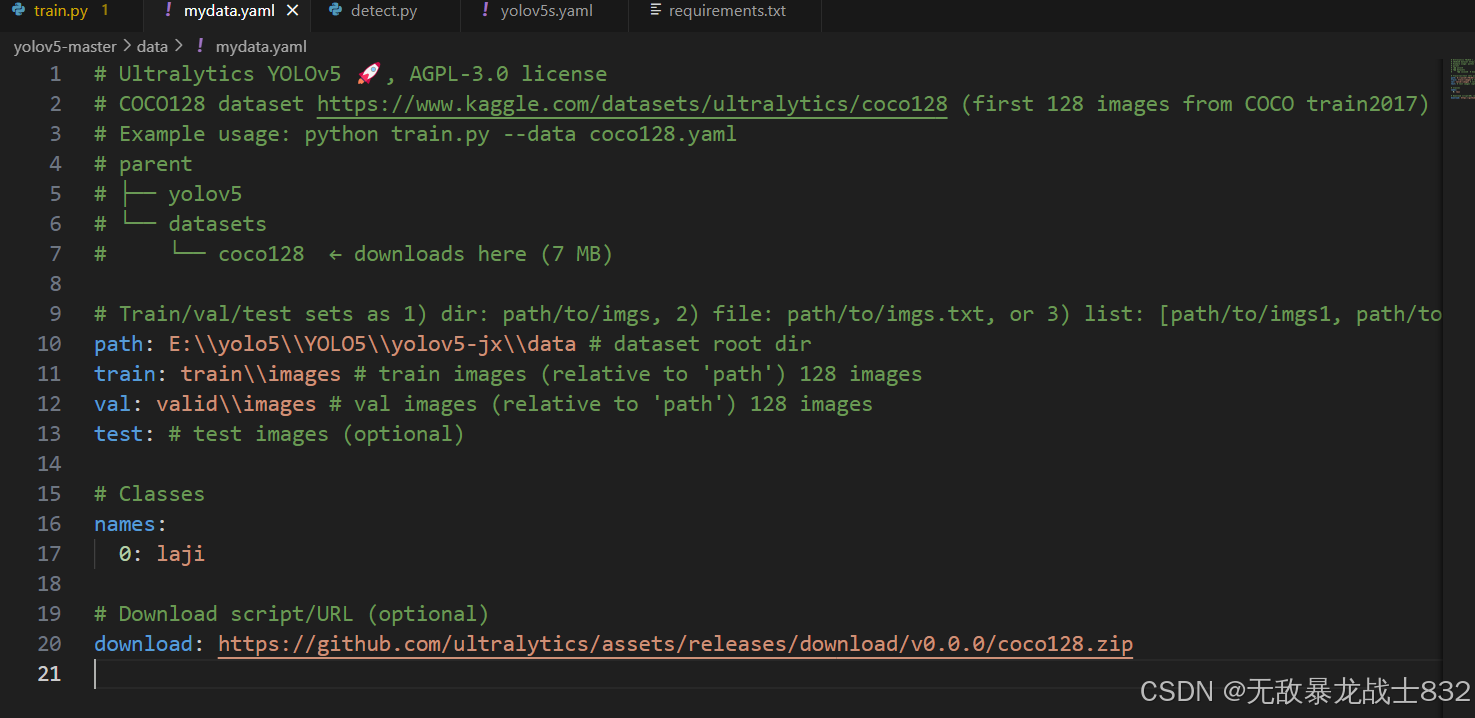
复制coco128.yaml文件,粘贴并改名为mydata.yaml
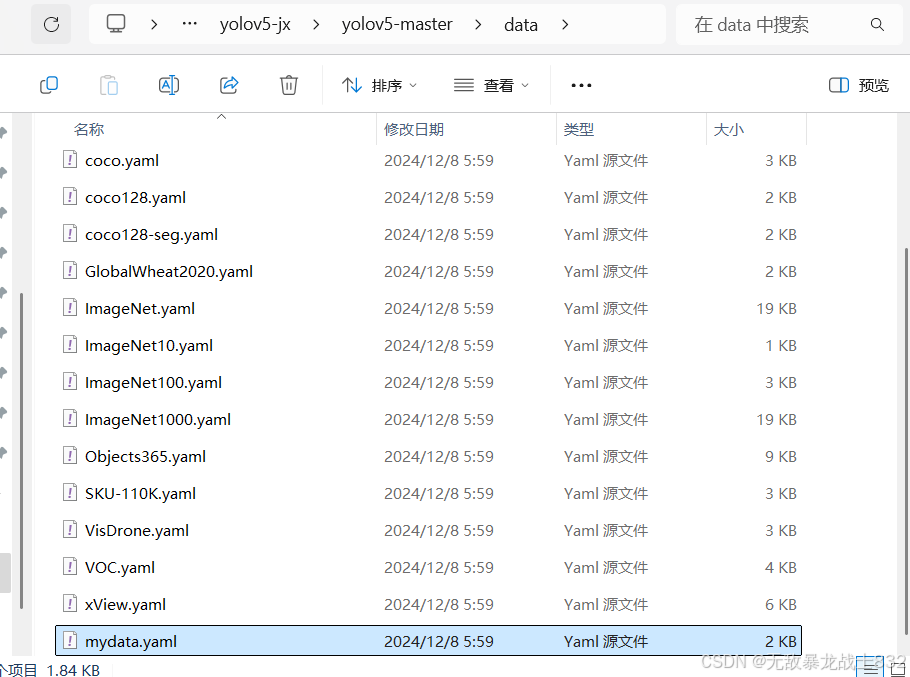
然后打开mydata.yaml,修改
path:是你的data路径
train:是你的训练集照片路径
val:是你的验证集路径
names:是你在labelimg中标注的标签名称
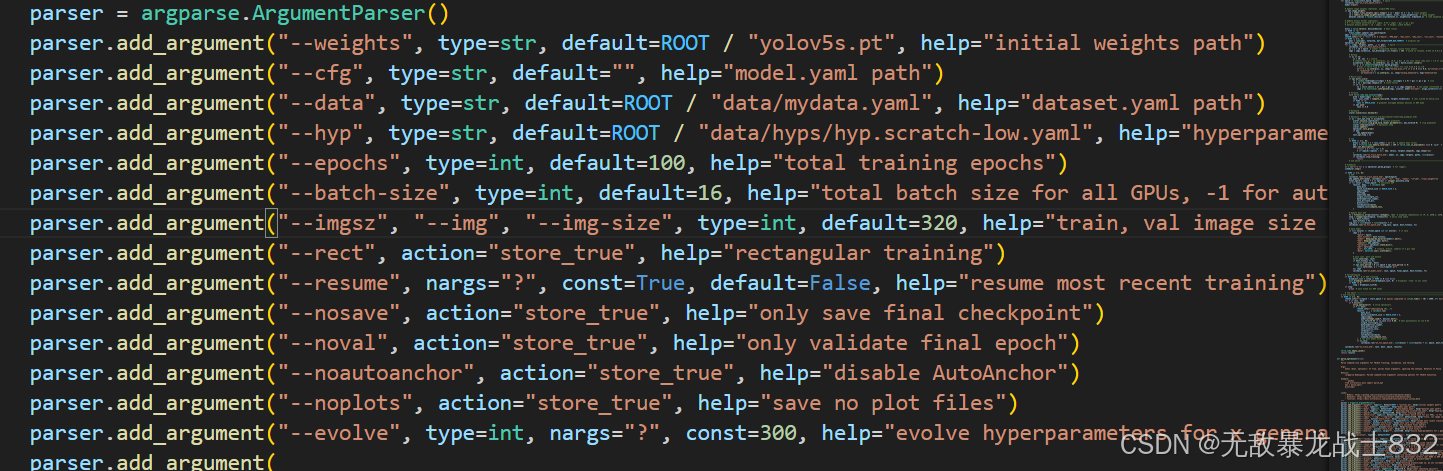
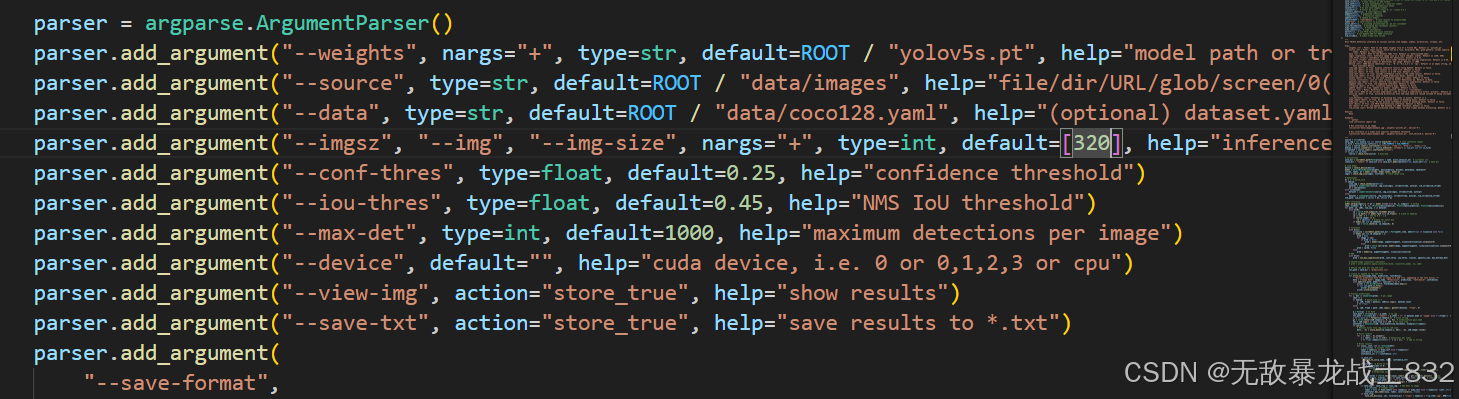
打开在yolov5-master下的train.py文件
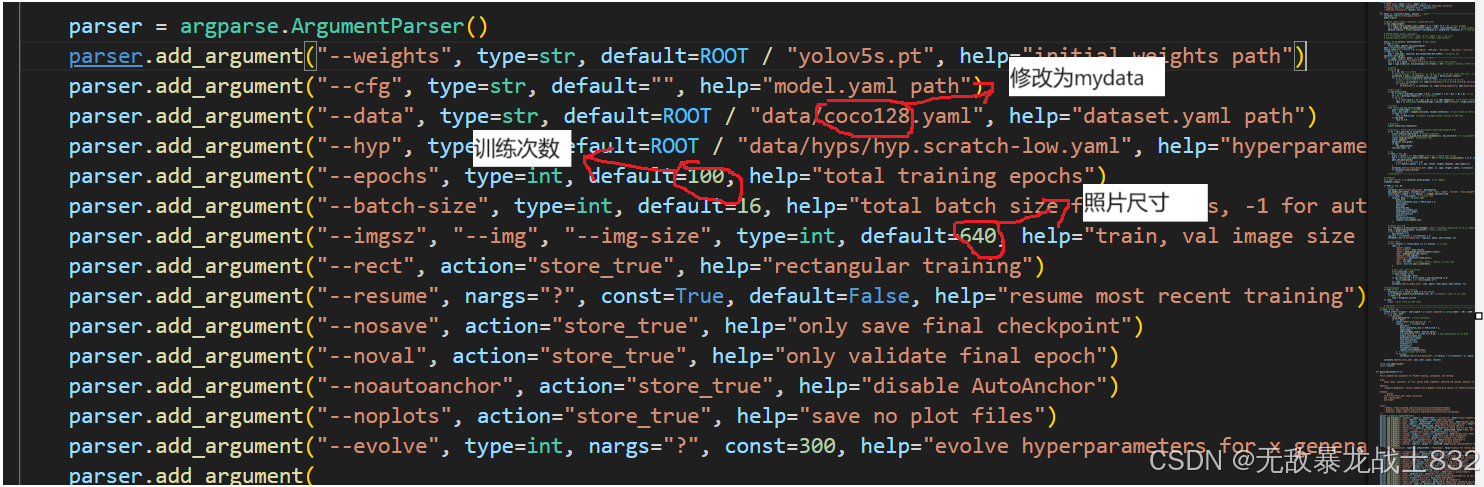
修改后,我这里照片尺寸选定320z
在打开detect.py文件,修改照片尺寸
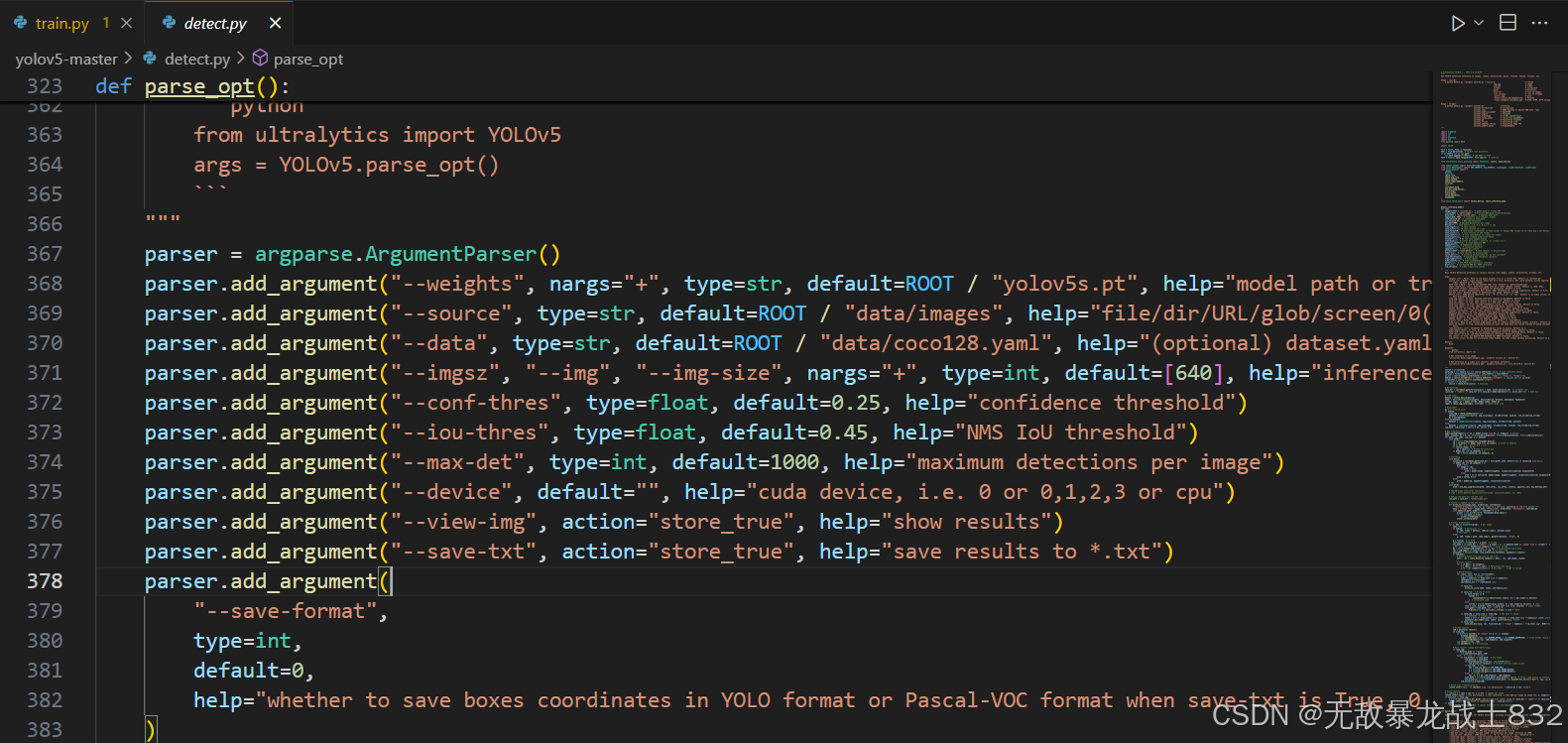
修改后
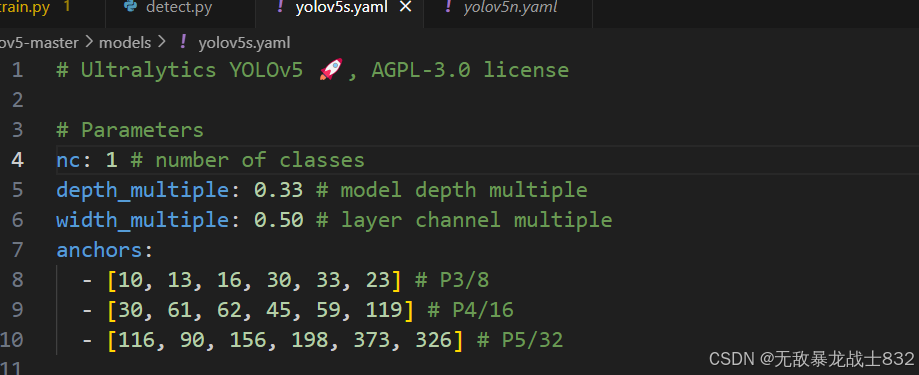
在models文件夹中,打开yolov5s.yaml(打开什么的.yaml)取决于你上面修改的两个文件中的--weights,将nc:后的数字改为你标注的种类数量
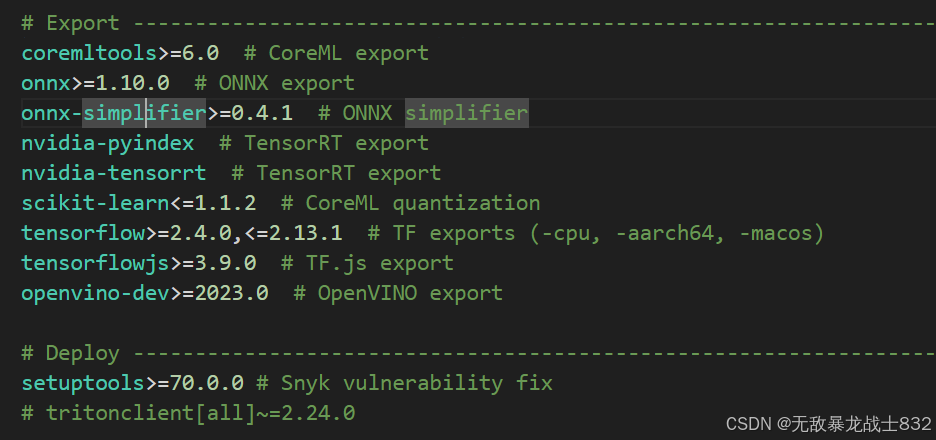
打开requirements.txt文件,将Export下的注释去掉
在命令行中进入yolov5-master目录

安装依赖
pip install -r requirements.txt
要是你报出这样的错误
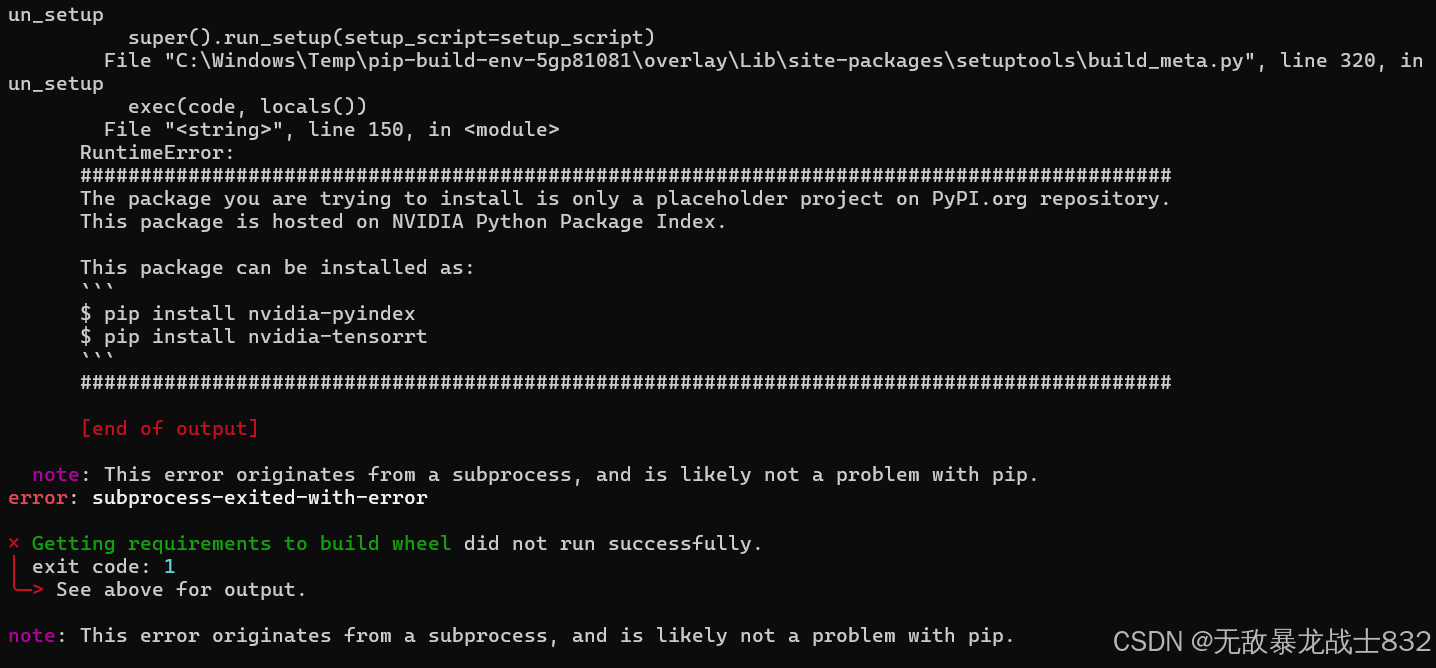
经过我的实测,该错误对后面并没有影响,所以无需在意
开始训练
安装完依赖后,就可以使用python train.py开始训练
出现以下错误,使用pip install pyyaml

出现以下错误,使用pip install tqdm

出现以下错误,使用pip install pandas
出现以下错误,使用pip install requests

出现以下错误,使用pip install numpy==1.20
如果觉得这里太慢,可以ctrl+鼠标左键进入游览器下载

然后就可以开始训练了,出现的警告不用管,那是因为PyTorch版本过高导致的
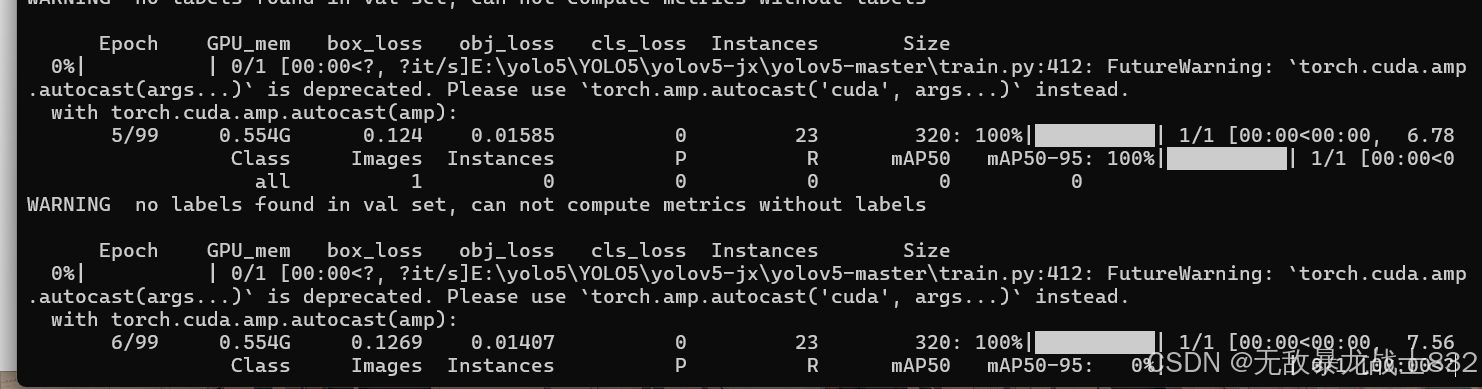
训练完后他会告诉你模型放在哪个文件

导出模型
进入export.pt文件
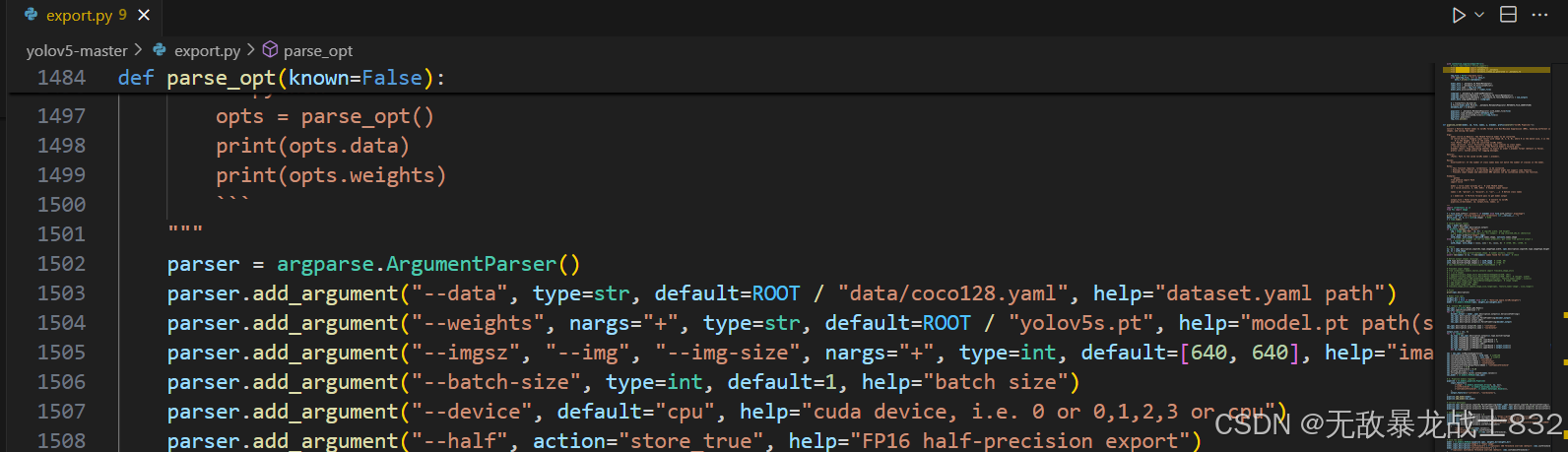
修改--imgsz,修改的要与你之前训练前的大小一致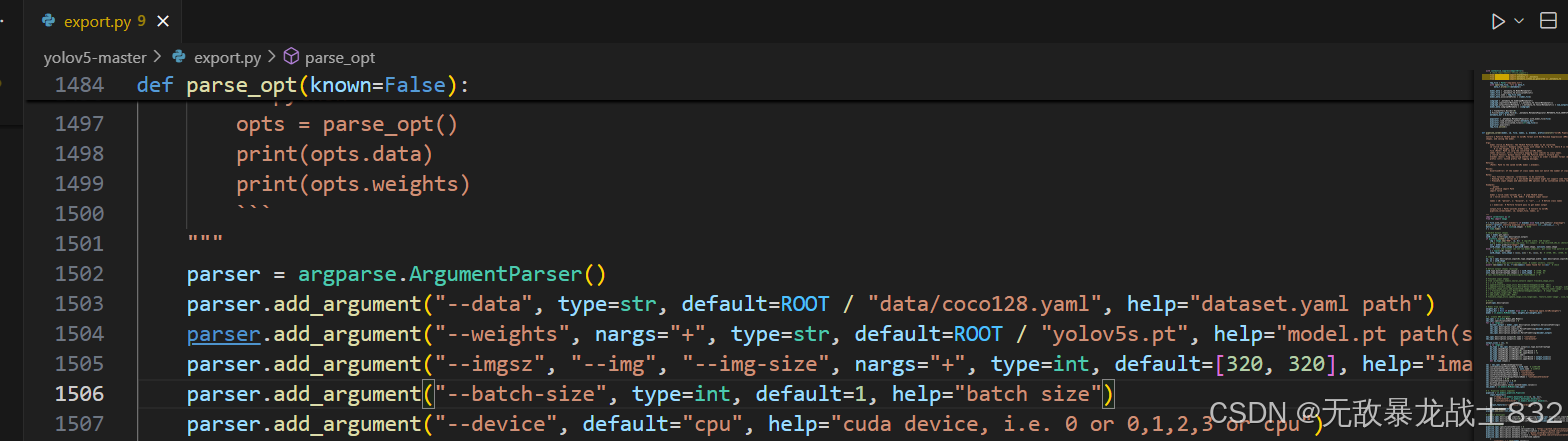
然后输入命令python export.py --weights runs\train\exp5\weights\best.pt --include onnx

看见该提示及成功转换
板端环境部署
我所使用的树莓派4B安装的是ubuntu20的,如果是树莓派官方镜像内容大致不差
安装虚拟环境
1.安装 Python 3 和 venv 模块
sudo apt install python3 python3-venv python3-pip
2.创建虚拟环境
python3 -m venv yolov5
3.激活虚拟环境
source yolov5/bin/activate
安装依赖
1.安装opencv
pip install opencv-python -i https://pypi.tuna.tsinghua.edu.cn/simple
2.安装pytorch
pip install torch==2.0.0 torchvision==0.15.0 -i https://mirrors.aliyun.com/pypi/simple/
3.安装onnx
pip install onnx -i https://pypi.tuna.tsinghua.edu.cn/simple
4.安装onnxruntime
pip install onnxruntime -i https://pypi.tuna.tsinghua.edu.cn/simple
开始识别
1.建立文件夹存放onnx文件
mkdir YOLOV5_jx
2.将onnx文件复制到YOLOV5_jx中
可以借助vscode的远程连接,以及其他工具,这里不再过多描述
3.编写程序
在bast.onnx同一级目录下创建.py文件
touch run_YOLOV5.py
编写程序sudo nano run_YOLOV5.py
import cv2
import numpy as np
import onnxruntime as ort
import time
def plot_one_box(x, img, color=None, label=None, line_thickness=None):
"""
description: Plots one bounding box on image img,
this function comes from YoLov5 project.
param:
x: a box likes [x1,y1,x2,y2]
img: a opencv image object
color: color to draw rectangle, such as (0,255,0)
label: str
line_thickness: int
return:
no return
"""
tl = (
line_thickness or round(0.002 * (img.shape[0] + img.shape[1]) / 2) + 1
) # line/font thickness
color = color or [random.randint(0, 255) for _ in range(3)]
c1, c2 = (int(x[0]), int(x[1])), (int(x[2]), int(x[3]))
cv2.rectangle(img, c1, c2, color, thickness=tl, lineType=cv2.LINE_AA)
if label:
tf = max(tl - 1, 1) # font thickness
t_size = cv2.getTextSize(label, 0, fontScale=tl / 3, thickness=tf)[0]
c2 = c1[0] + t_size[0], c1[1] - t_size[1] - 3
cv2.rectangle(img, c1, c2, color, -1, cv2.LINE_AA) # filled
cv2.putText(
img,
label,
(c1[0], c1[1] - 2),
0,
tl / 3,
[225, 255, 255],
thickness=tf,
lineType=cv2.LINE_AA,
)
def _make_grid( nx, ny):
xv, yv = np.meshgrid(np.arange(ny), np.arange(nx))
return np.stack((xv, yv), 2).reshape((-1, 2)).astype(np.float32)
def cal_outputs(outs,nl,na,model_w,model_h,anchor_grid,stride):
row_ind = 0
grid = [np.zeros(1)] * nl
for i in range(nl):
h, w = int(model_w/ stride[i]), int(model_h / stride[i])
length = int(na * h * w)
if grid[i].shape[2:4] != (h, w):
grid[i] = _make_grid(w, h)
outs[row_ind:row_ind + length, 0:2] = (outs[row_ind:row_ind + length, 0:2] * 2. - 0.5 + np.tile(
grid[i], (na, 1))) * int(stride[i])
outs[row_ind:row_ind + length, 2:4] = (outs[row_ind:row_ind + length, 2:4] * 2) ** 2 * np.repeat(
anchor_grid[i], h * w, axis=0)
row_ind += length
return outs
def post_process_opencv(outputs,model_h,model_w,img_h,img_w,thred_nms,thred_cond):
conf = outputs[:,4].tolist()
c_x = outputs[:,0]/model_w*img_w
c_y = outputs[:,1]/model_h*img_h
w = outputs[:,2]/model_w*img_w
h = outputs[:,3]/model_h*img_h
p_cls = outputs[:,5:]
if len(p_cls.shape)==1:
p_cls = np.expand_dims(p_cls,1)
cls_id = np.argmax(p_cls,axis=1)
p_x1 = np.expand_dims(c_x-w/2,-1)
p_y1 = np.expand_dims(c_y-h/2,-1)
p_x2 = np.expand_dims(c_x+w/2,-1)
p_y2 = np.expand_dims(c_y+h/2,-1)
areas = np.concatenate((p_x1,p_y1,p_x2,p_y2),axis=-1)
areas = areas.tolist()
ids = cv2.dnn.NMSBoxes(areas,conf,thred_cond,thred_nms)
if len(ids)>0:
return np.array(areas)[ids],np.array(conf)[ids],cls_id[ids]
else:
return [],[],[]
def infer_img(img0,net,model_h,model_w,nl,na,stride,anchor_grid,thred_nms=0.4,thred_cond=0.5):
# 图像预处理
img = cv2.resize(img0, [model_w,model_h], interpolation=cv2.INTER_AREA)
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
img = img.astype(np.float32) / 255.0
blob = np.expand_dims(np.transpose(img, (2, 0, 1)), axis=0)
# 模型推理
outs = net.run(None, {net.get_inputs()[0].name: blob})[0].squeeze(axis=0)
# 输出坐标矫正
outs = cal_outputs(outs,nl,na,model_w,model_h,anchor_grid,stride)
# 检测框计算
img_h,img_w,_ = np.shape(img0)
boxes,confs,ids = post_process_opencv(outs,model_h,model_w,img_h,img_w,thred_nms,thred_cond)
return boxes,confs,ids
if __name__ == "__main__":
# 模型加载
model_pb_path = "best.onnx" #这里为自己训练出模型的名字
so = ort.SessionOptions()
net = ort.InferenceSession(model_pb_path, so)
# 标签字典 (以下为标注时的种类)
dic_labels= {0:'laji'}
# 模型参数 (导出模型时的尺寸)
model_h = 320
model_w = 320
nl = 3
na = 3
stride=[8.,16.,32.]
anchors = [[10, 13, 16, 30, 33, 23], [30, 61, 62, 45, 59, 119], [116, 90, 156, 198, 373, 326]]
anchor_grid = np.asarray(anchors, dtype=np.float32).reshape(nl, -1, 2)
video = 0
cap = cv2.VideoCapture(video)
flag_det = False
while True:
success, img0 = cap.read()
if success:
if flag_det:
t1 = time.time()
det_boxes,scores,ids = infer_img(img0,net,model_h,model_w,nl,na,stride,anchor_grid,thred_nms=0.4,thred_cond=0.5)
t2 = time.time()
for box,score,id in zip(det_boxes,scores,ids):
label = '%s:%.2f'%(dic_labels[id],score)
plot_one_box(box.astype(np.int16), img0, color=(255,0,0), label=label, line_thickness=None)
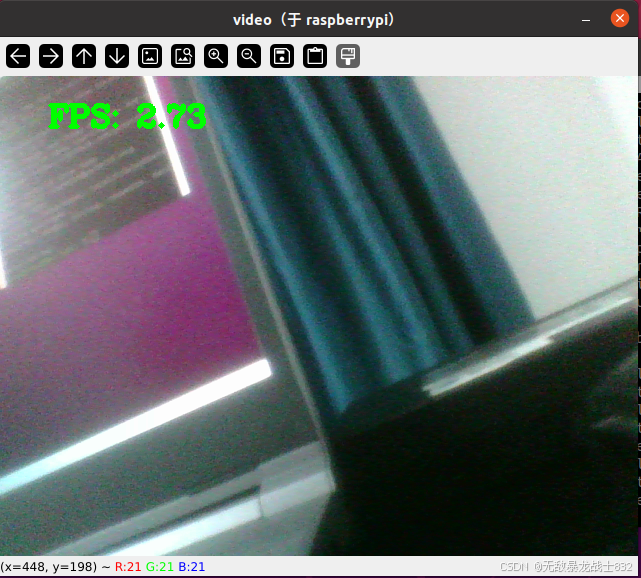
str_FPS = "FPS: %.2f"%(1./(t2-t1))
cv2.putText(img0,str_FPS,(50,50),cv2.FONT_HERSHEY_COMPLEX,1,(0,255,0),3)
cv2.imshow("video",img0)
key=cv2.waitKey(1) & 0xFF
if key == ord('q'):
break
elif key & 0xFF == ord('s'):
flag_det = not flag_det
print(flag_det)
cap.release() 4.运行代码
python3 run_YOLOV5.py
按下s开始识别
按下q结束

















 8675
8675

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









