






说明:观看B站视频的体会
作为笔记方便自己回顾.
1 实验
2 车
新建车型
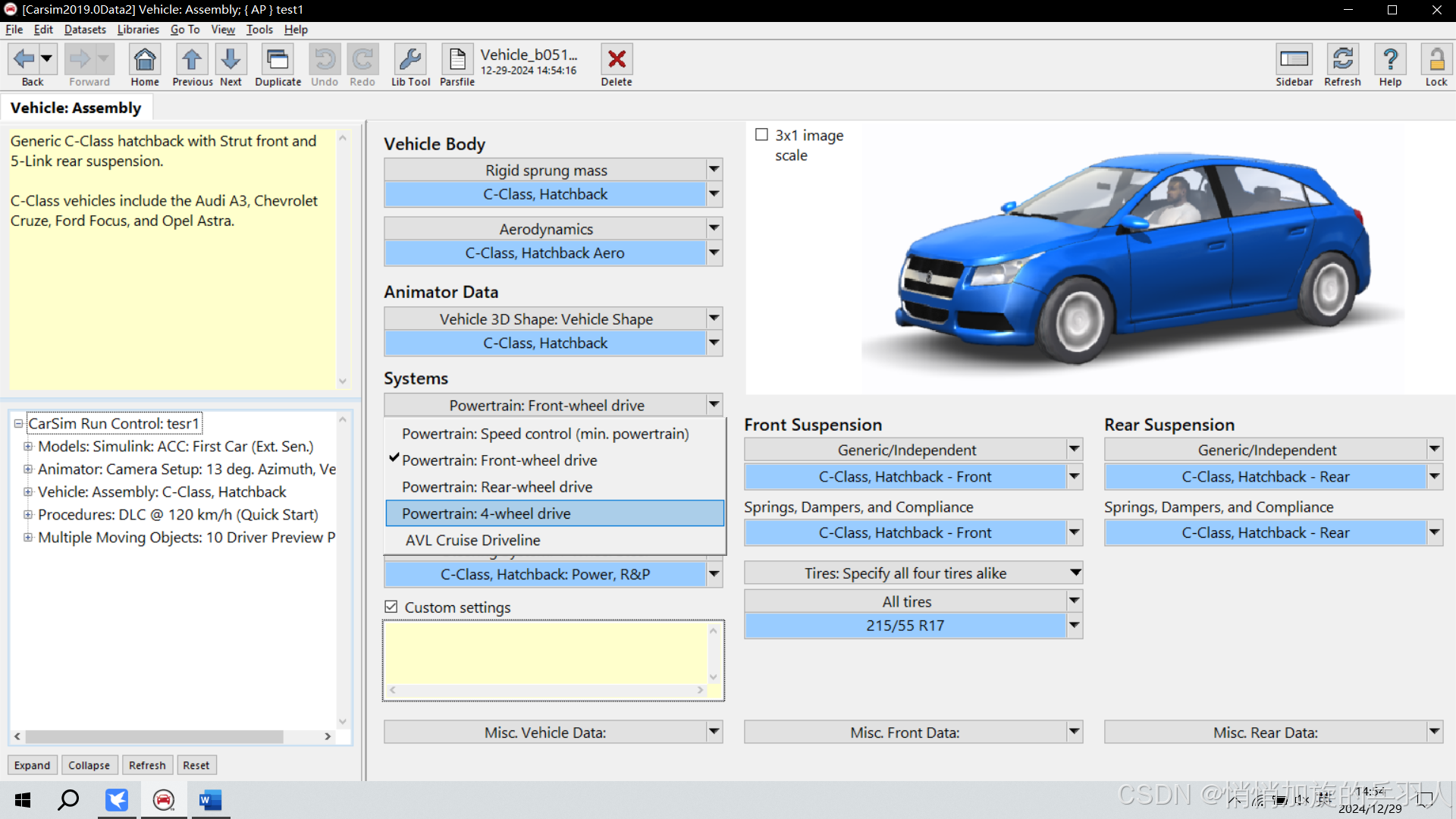
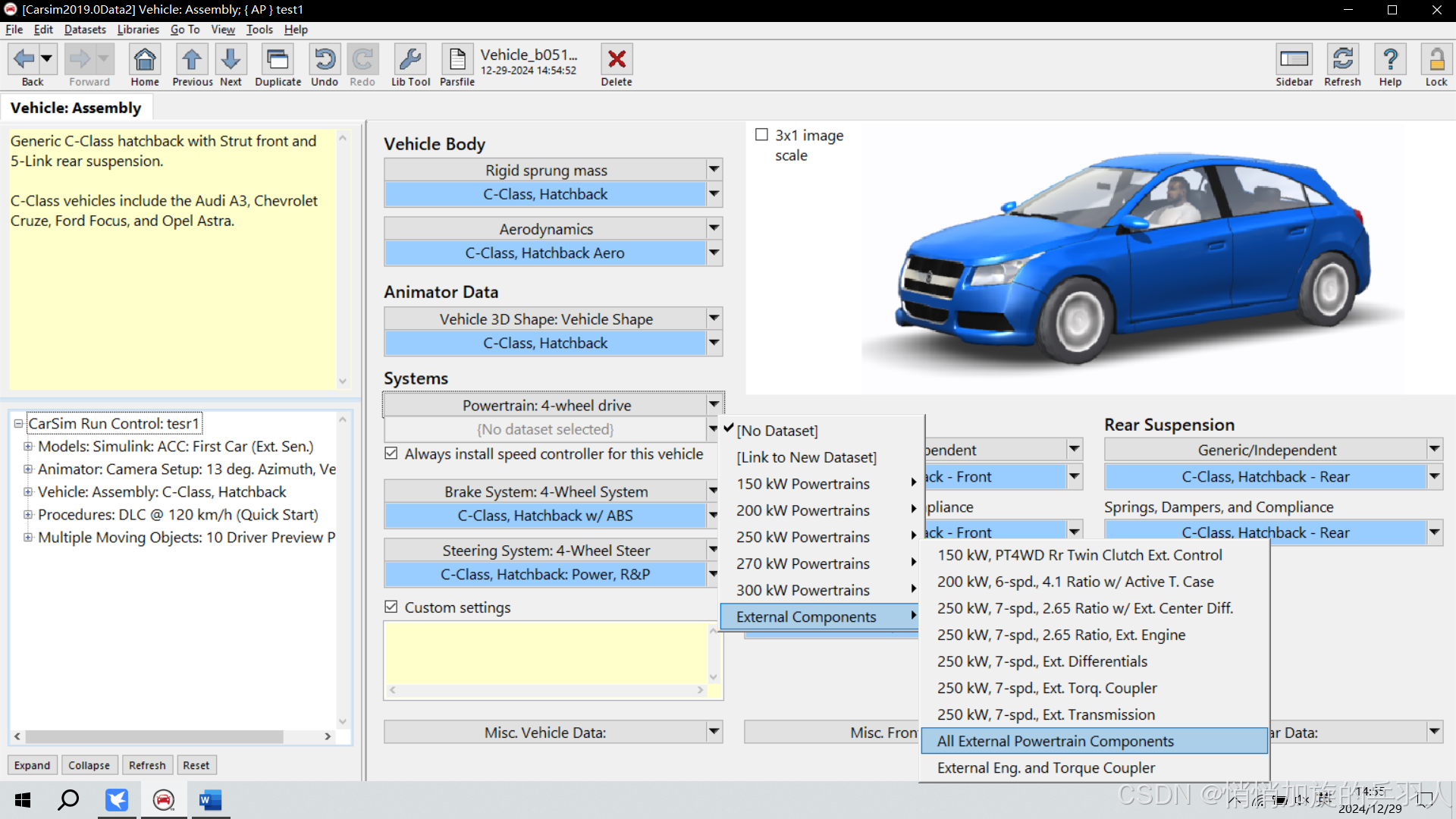
更换四轮驱动的车 外部控制
3 工况
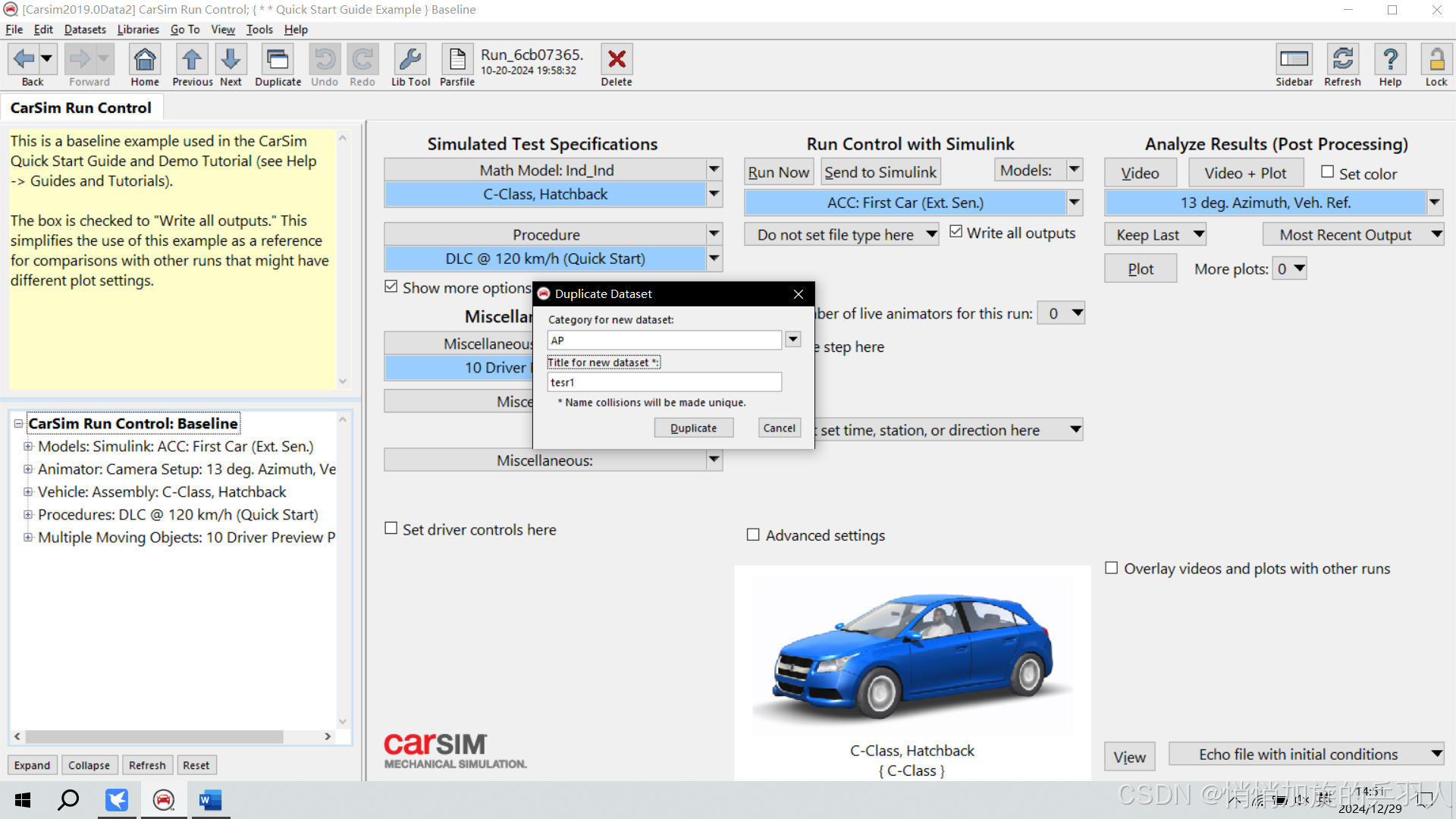
新建
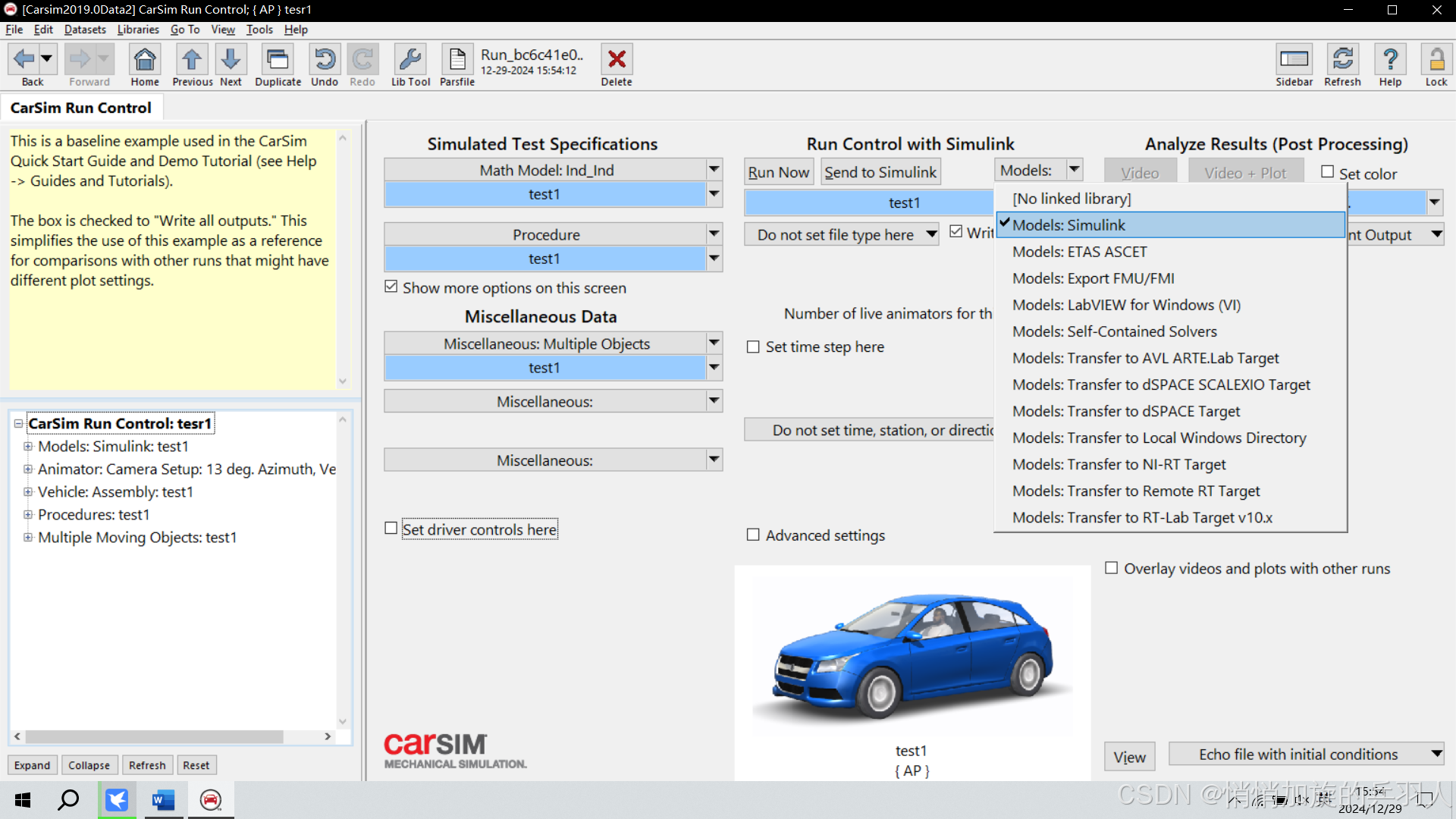
Simulink控制车辆 此处不设置速度,转角。
新建道路场景 这是比较重要的
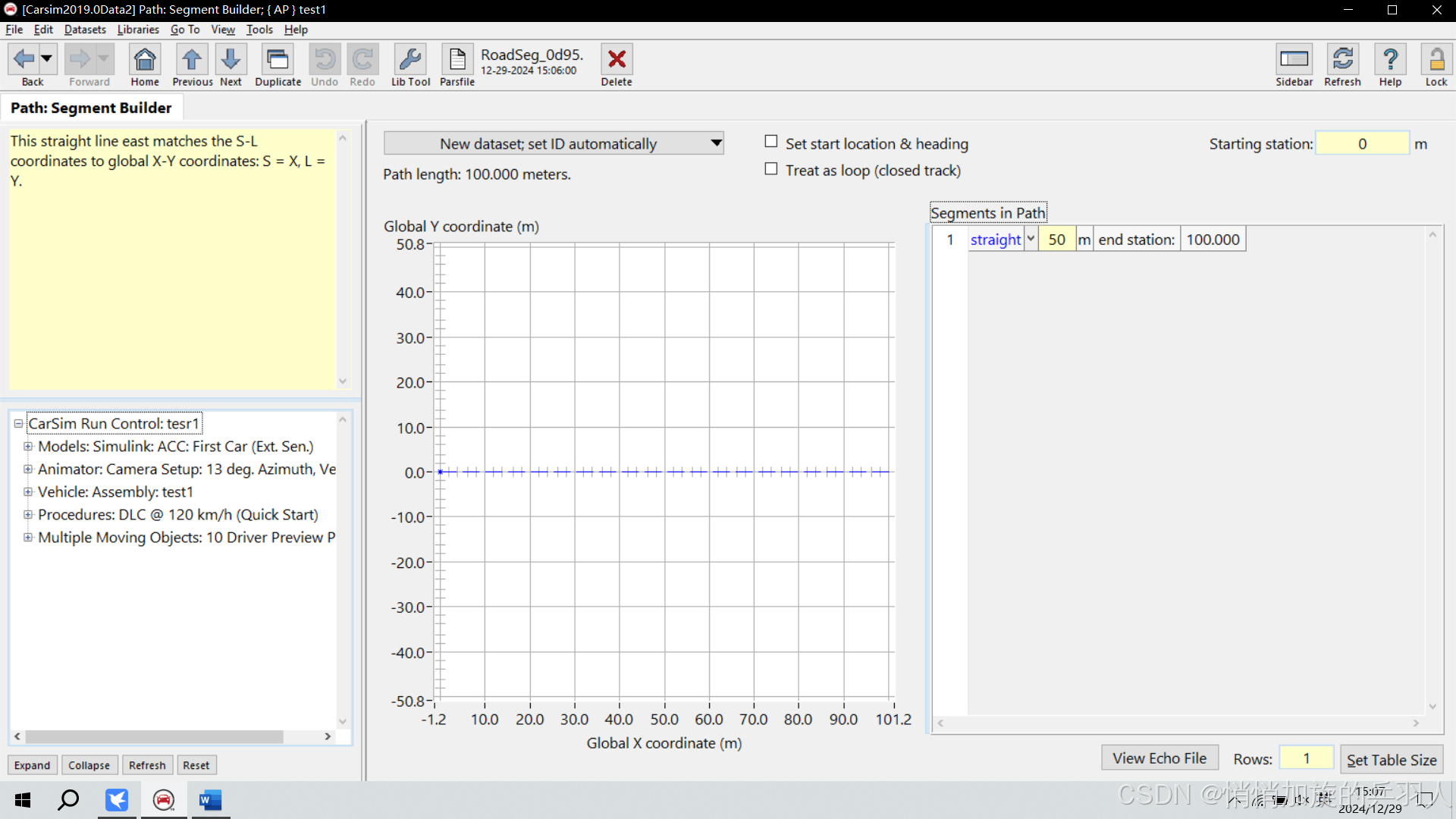
道路长度为50M
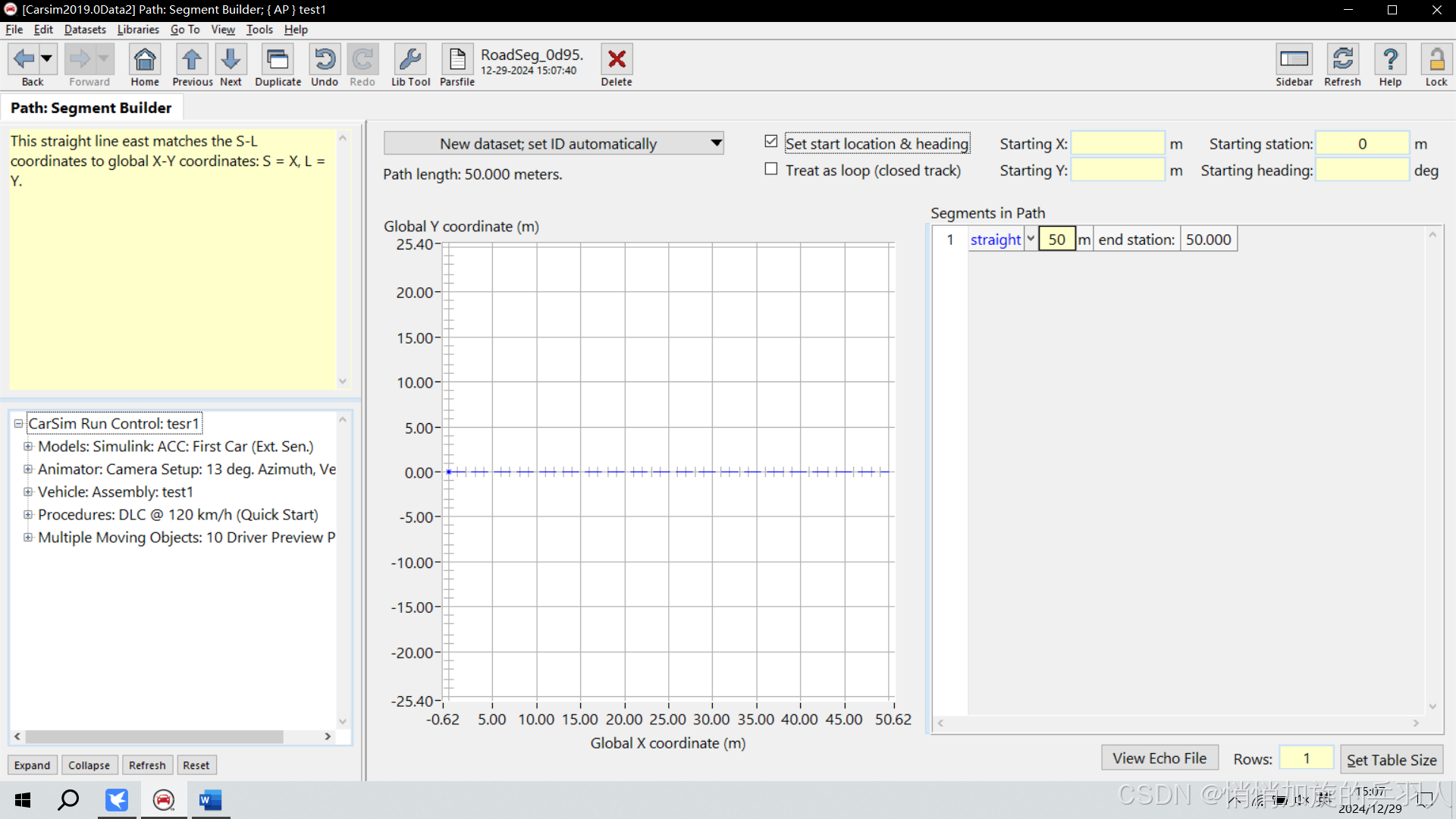
设置主车的初始位置,也可在上一级窗口编写代码
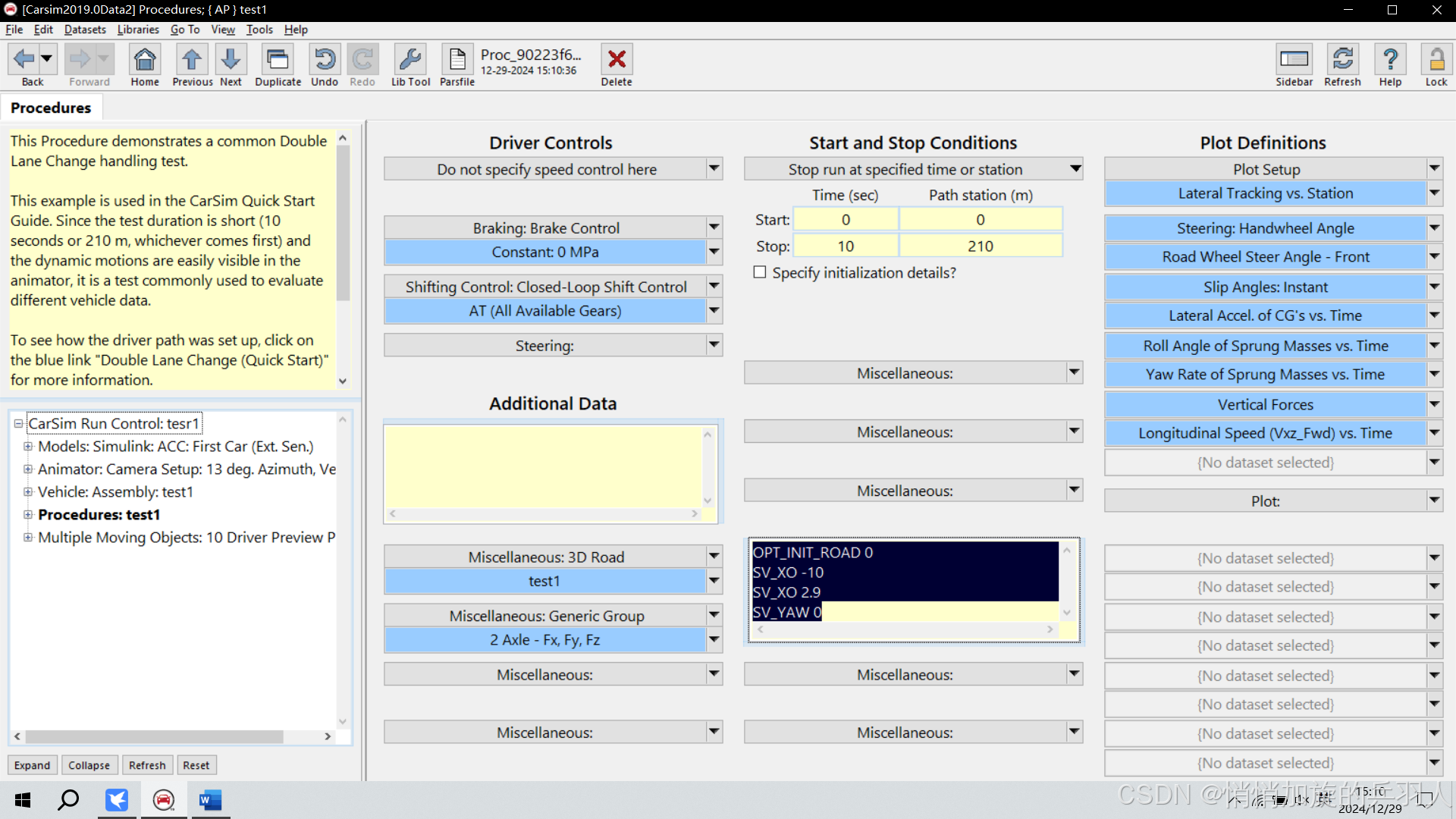
代码如上OPT_INIT_ROAD 0
SV_XO -10
SV_YO 2.9
SV_YAW 0
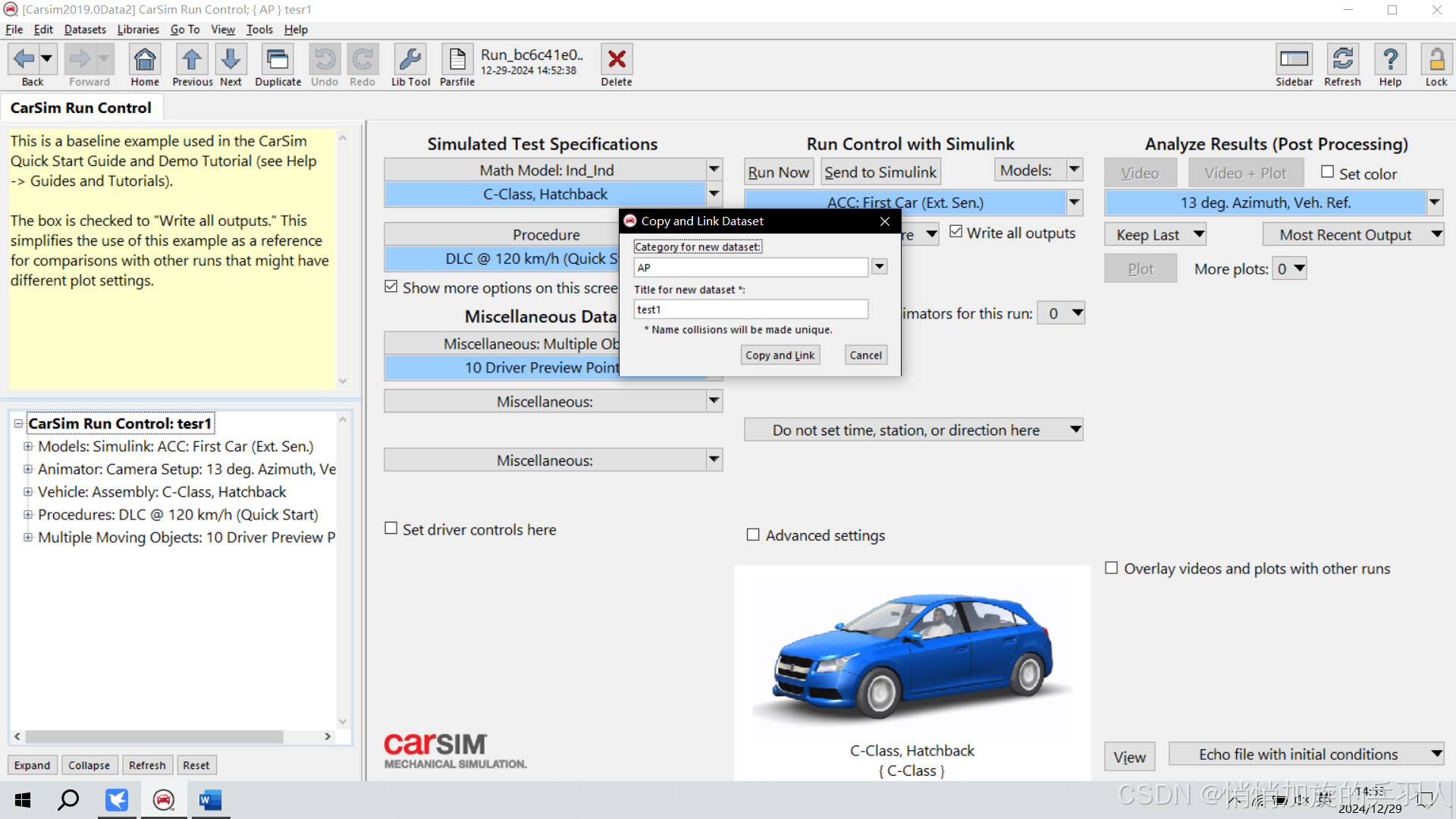
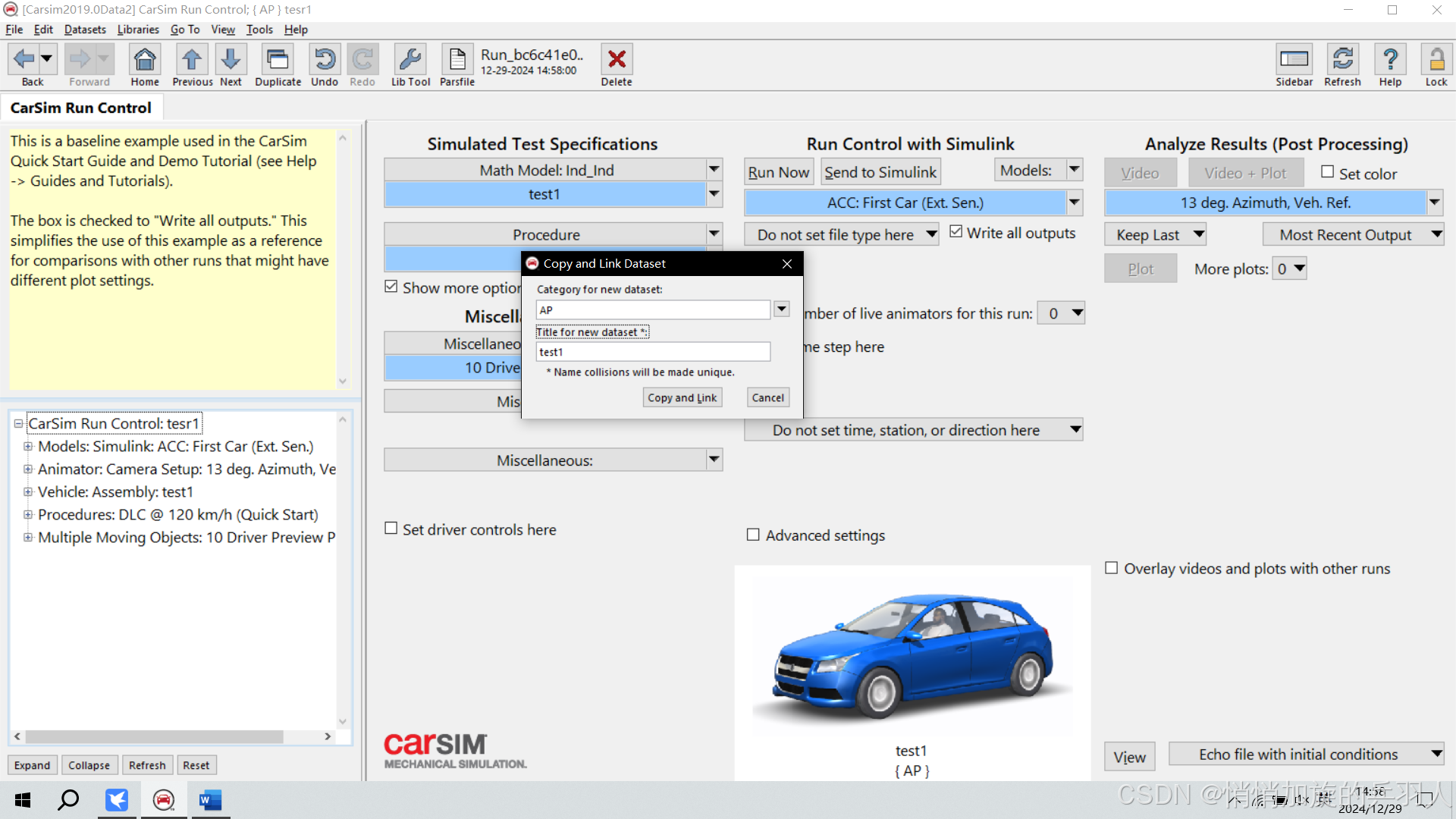
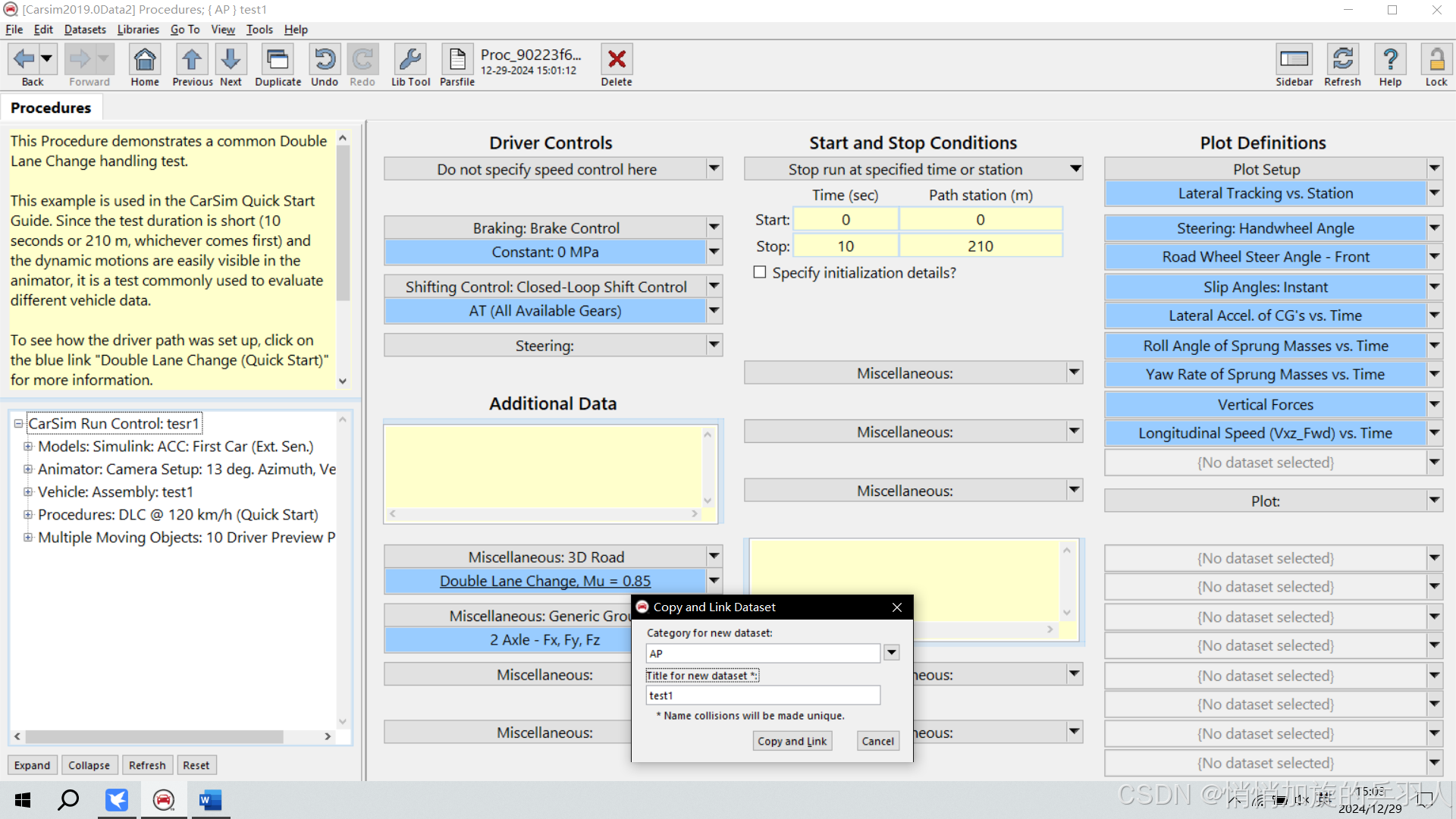
复制
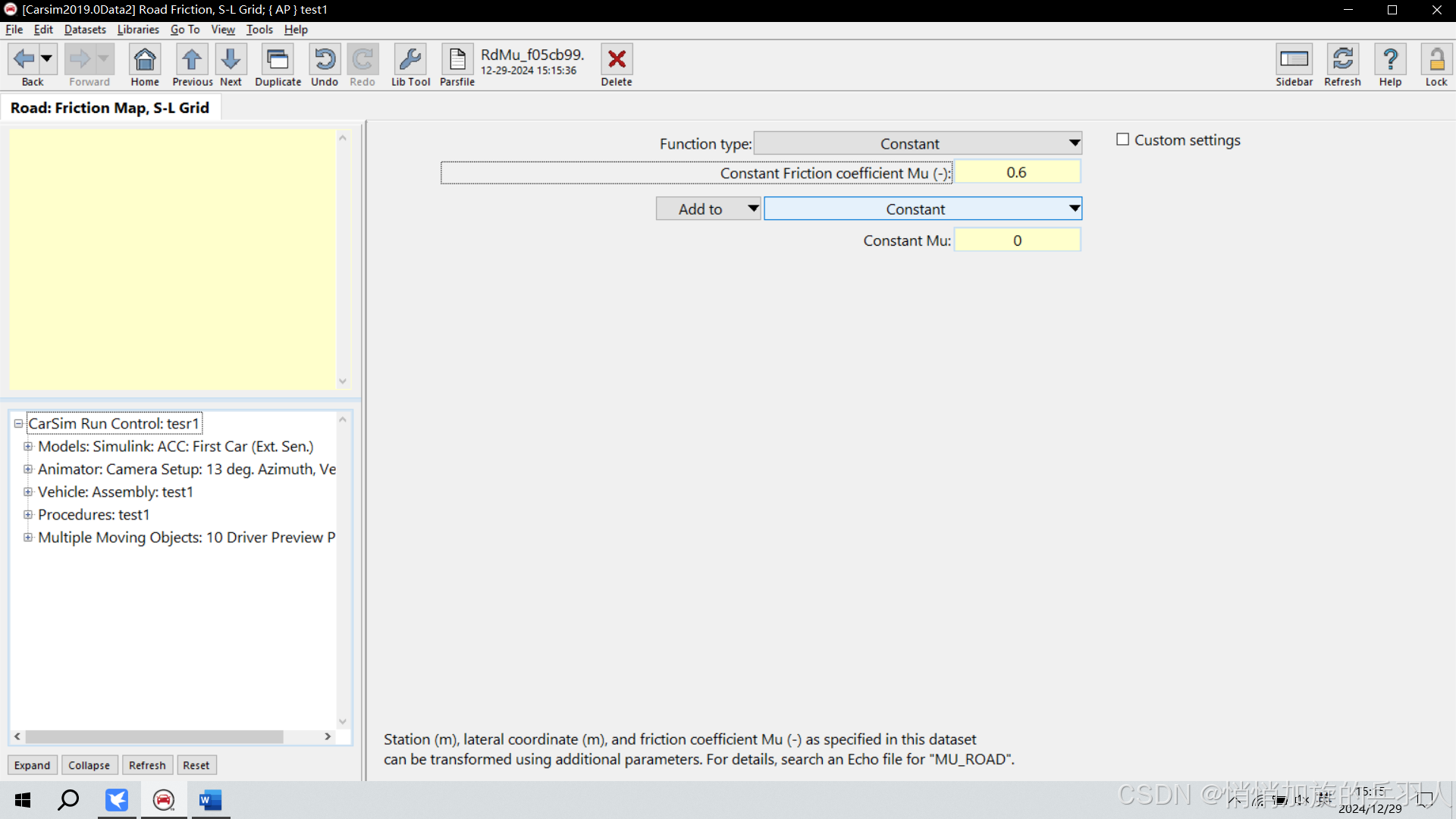
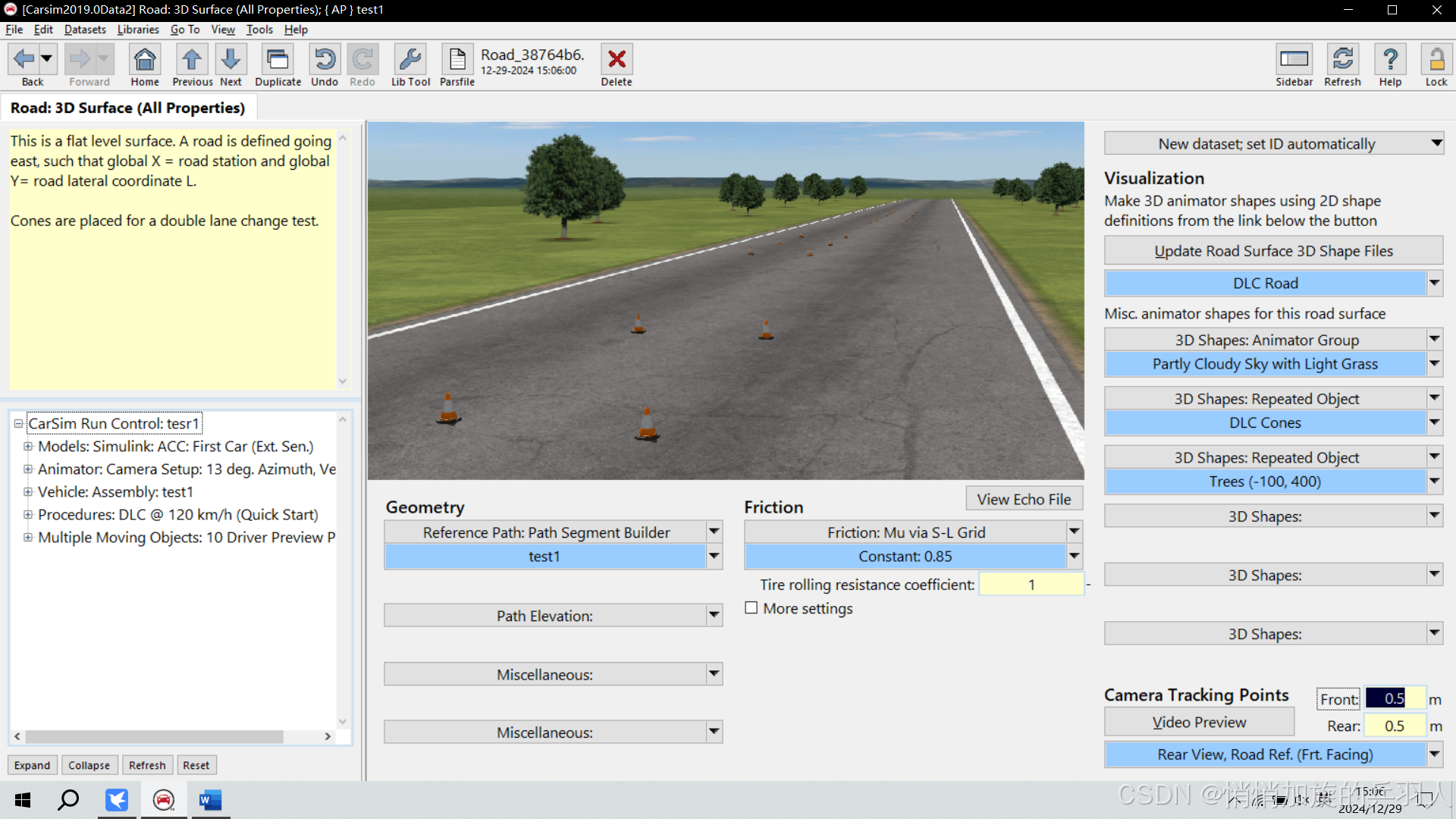
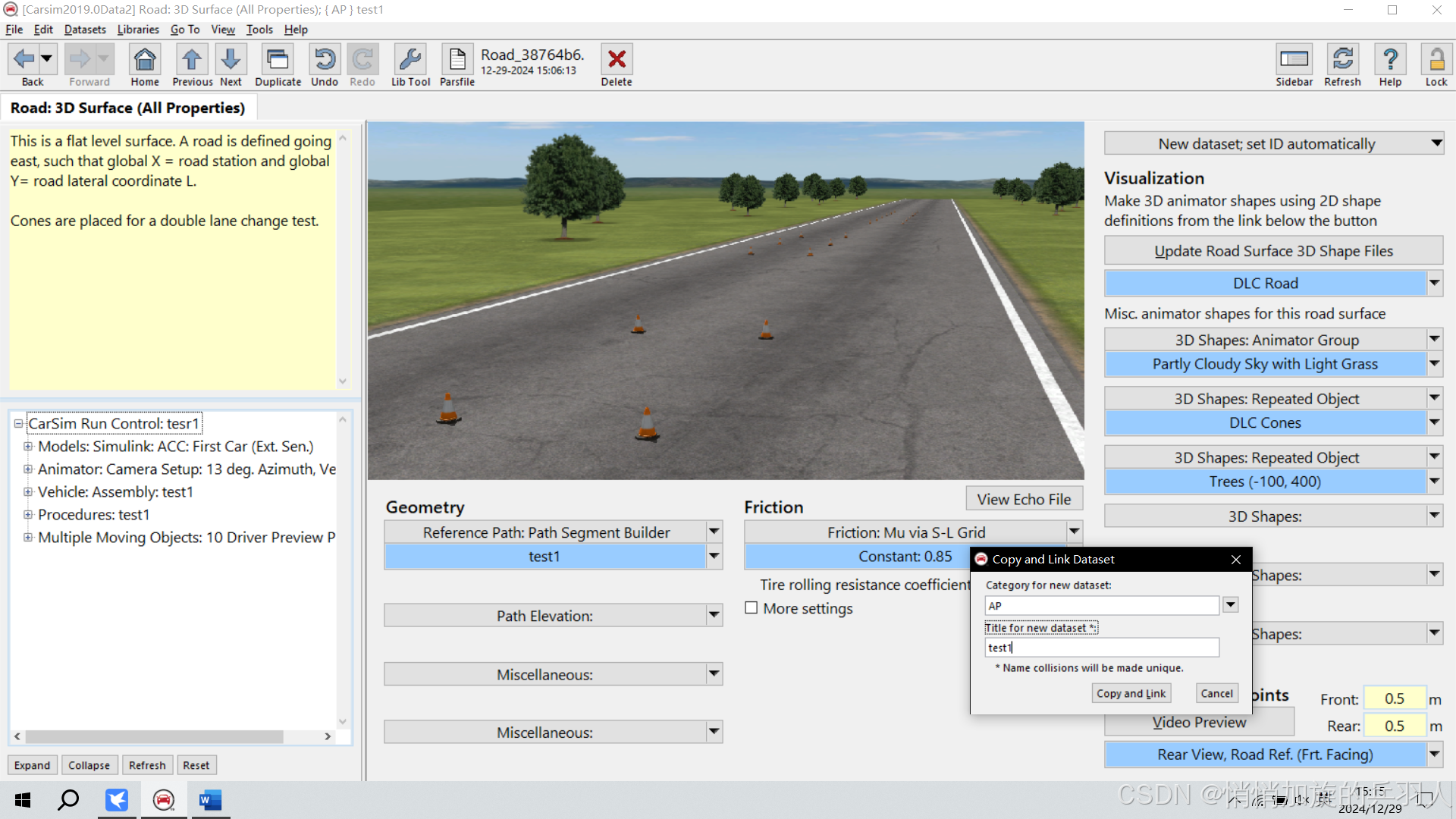
设置附着系数为0.6 为了是甩尾更明显一点。
复制
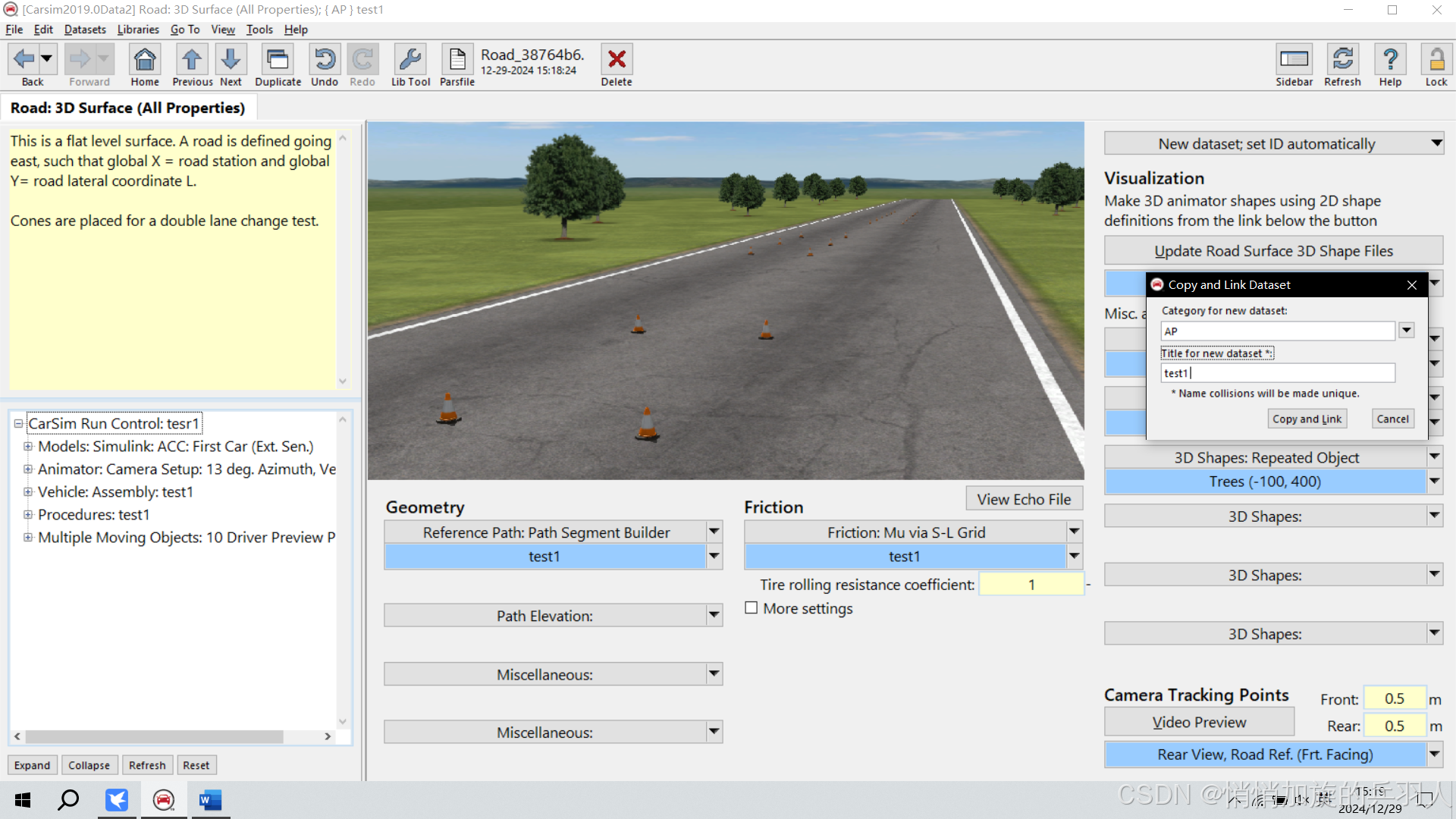
设置道路参数
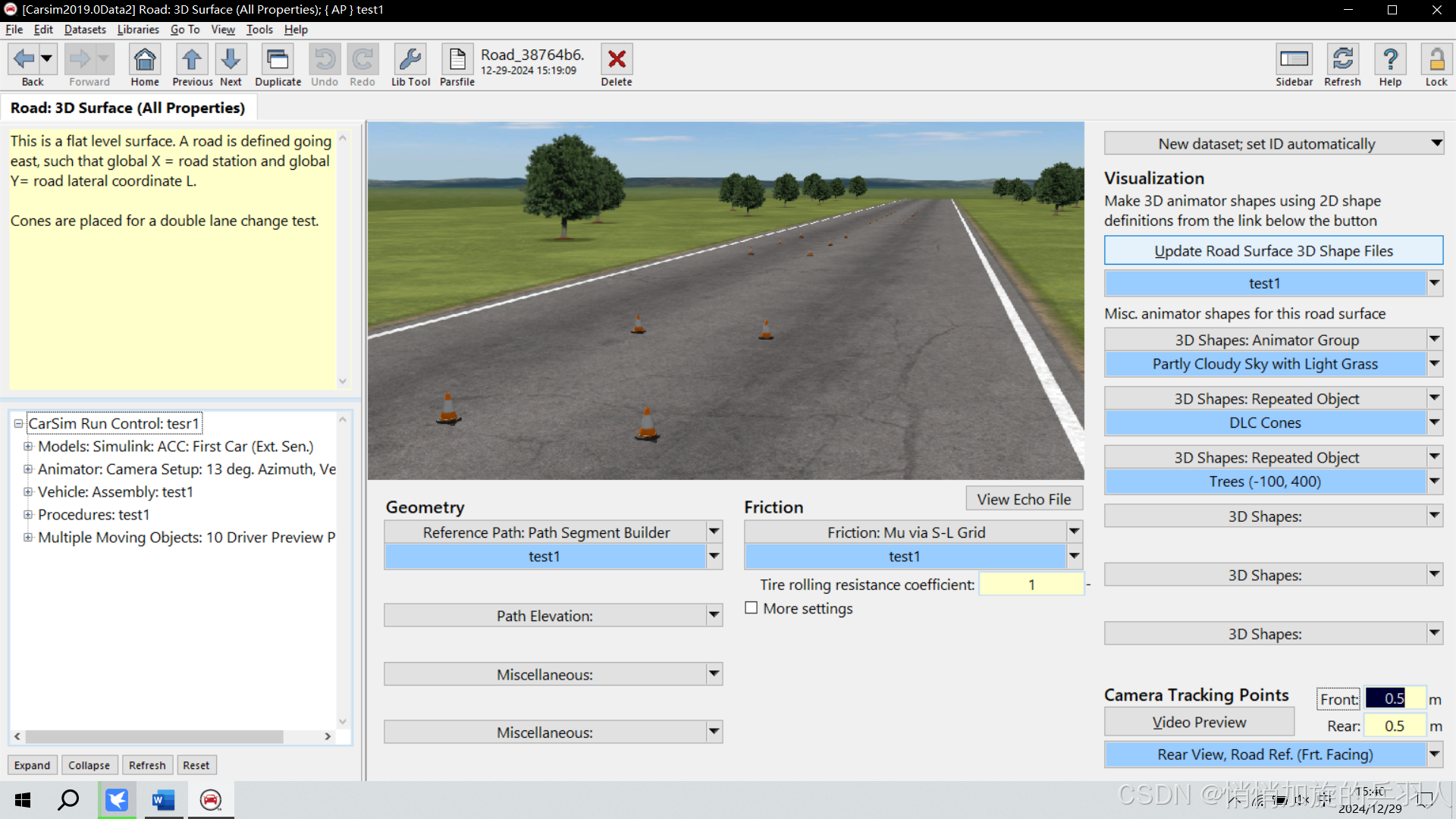
一定要记得更新道路
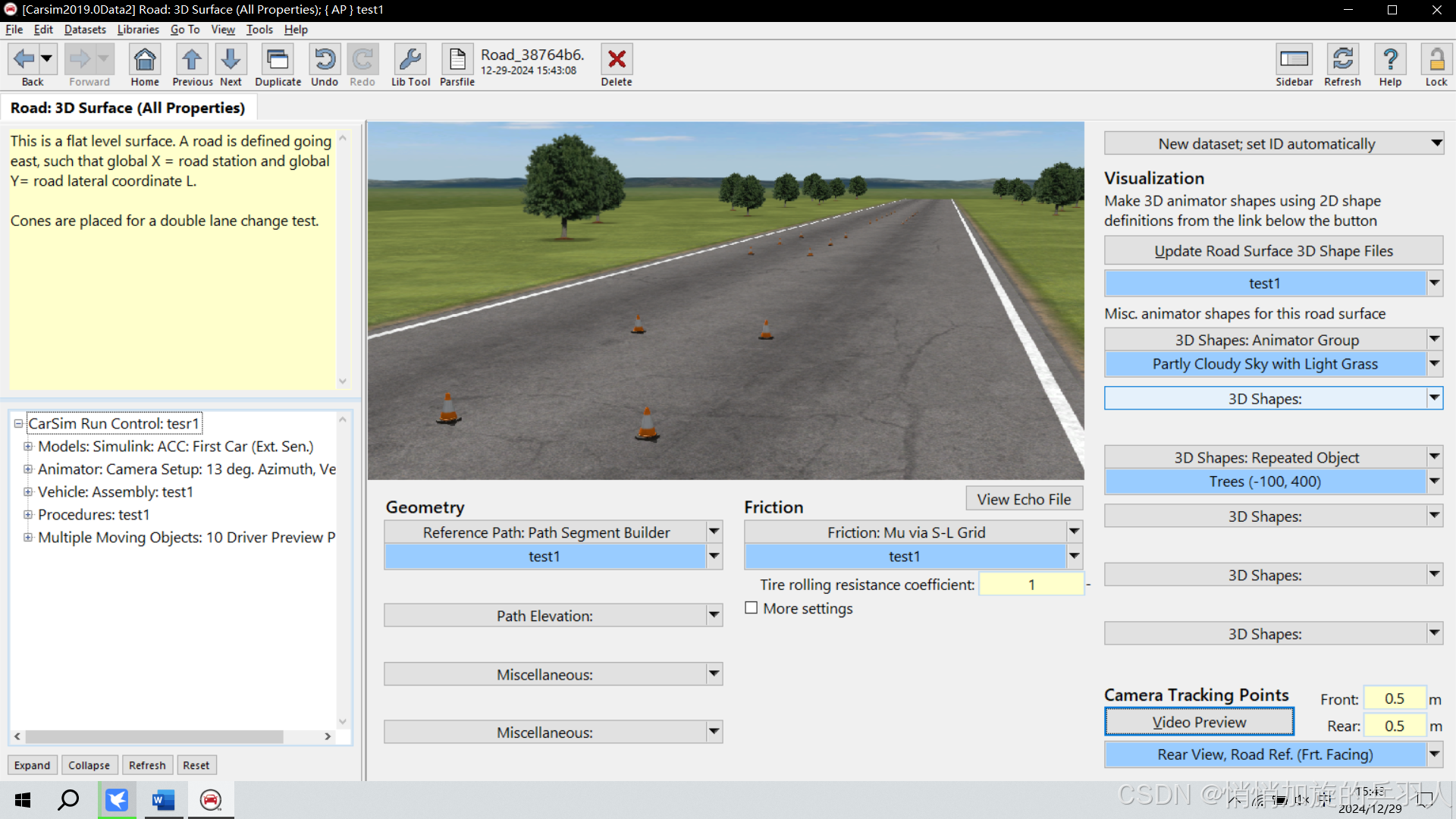
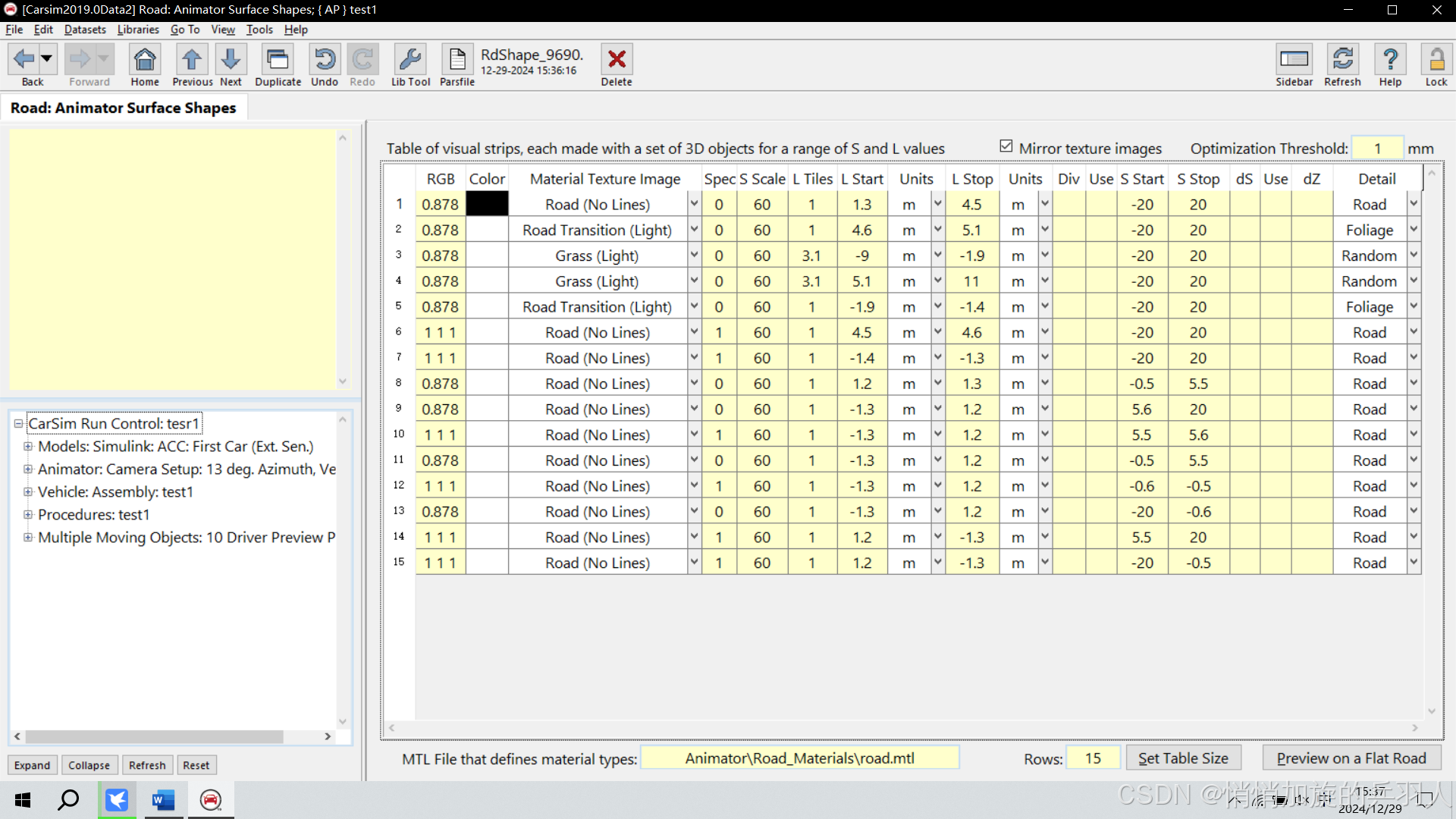
删除路面障碍
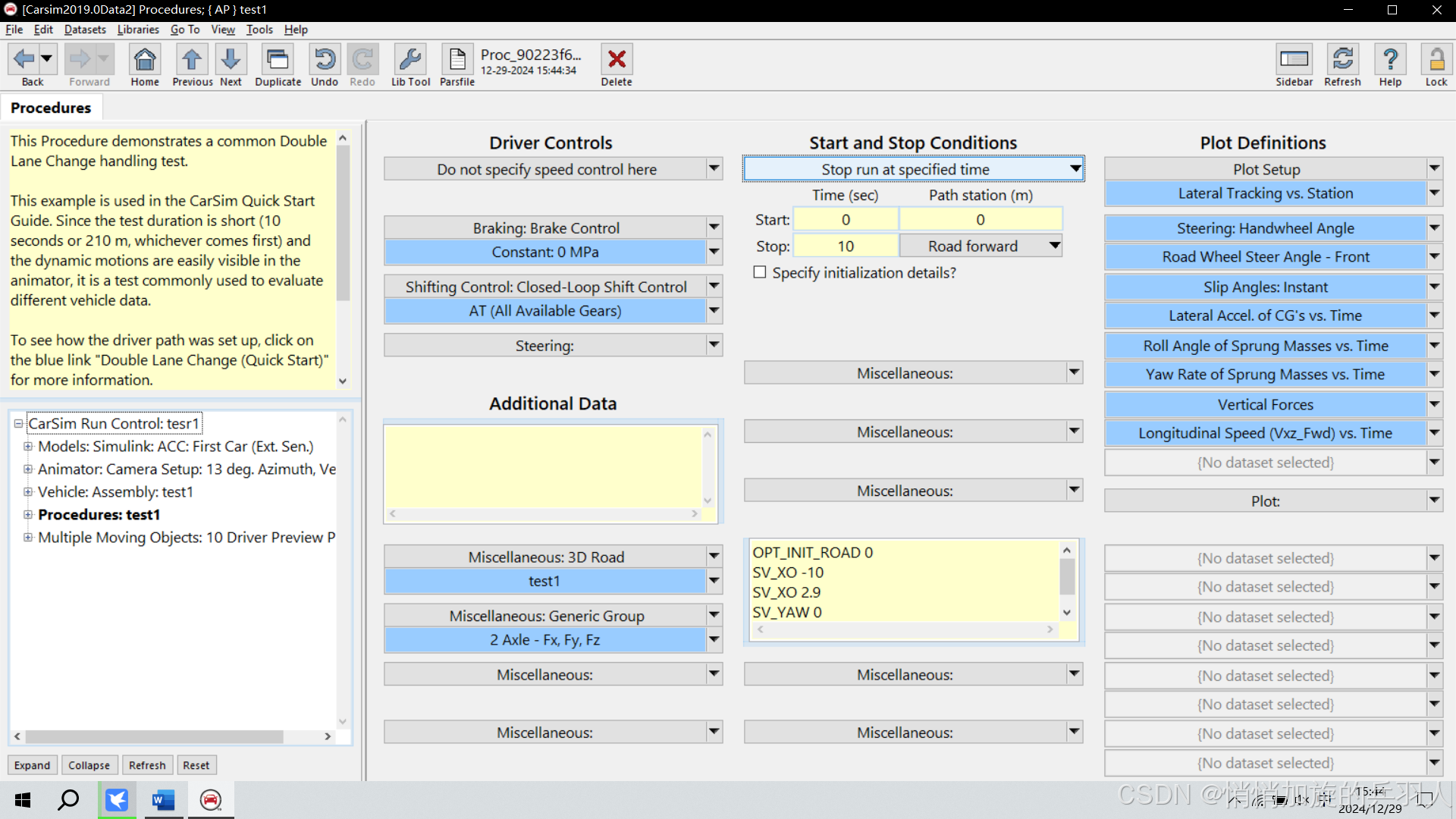
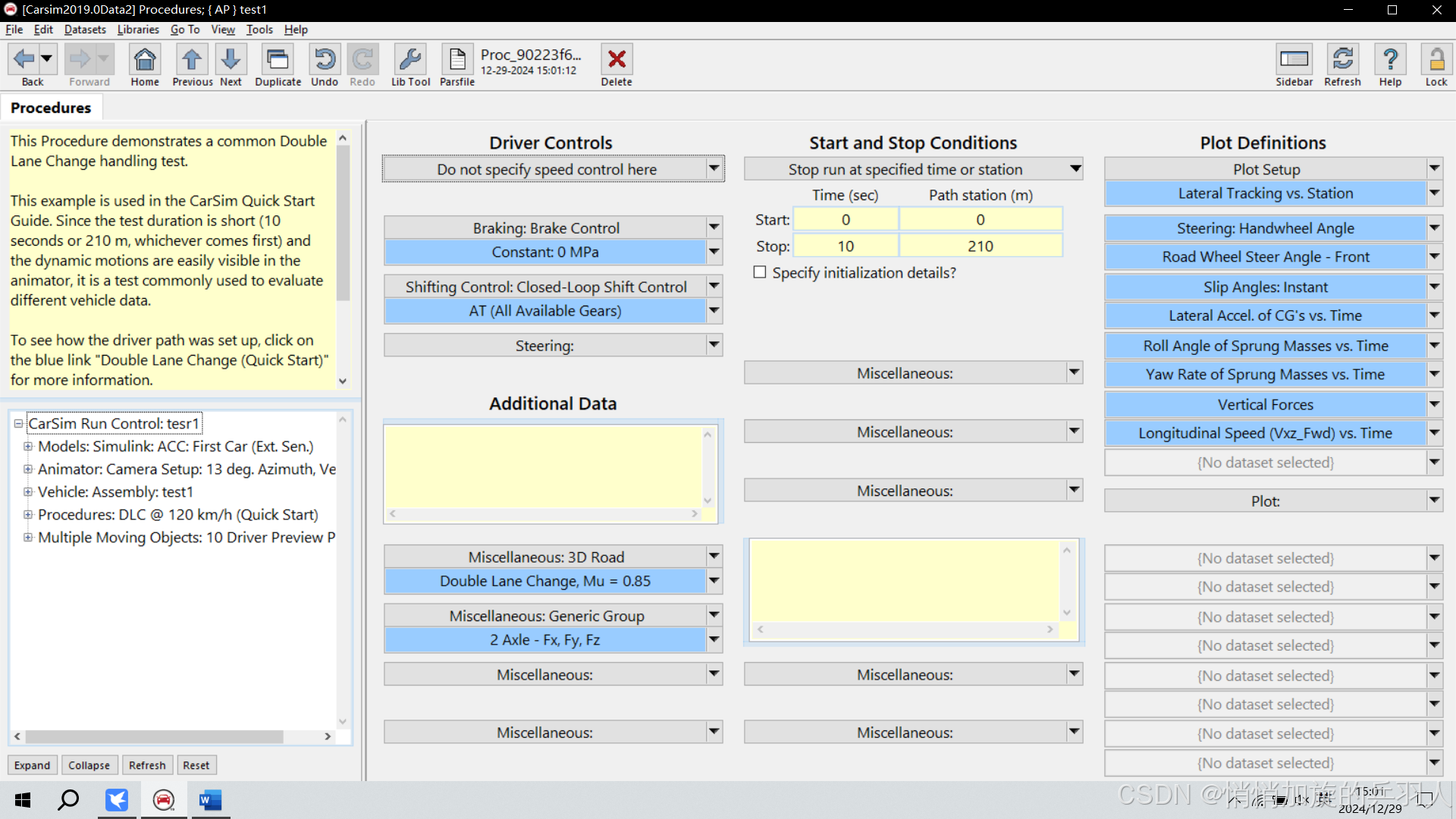
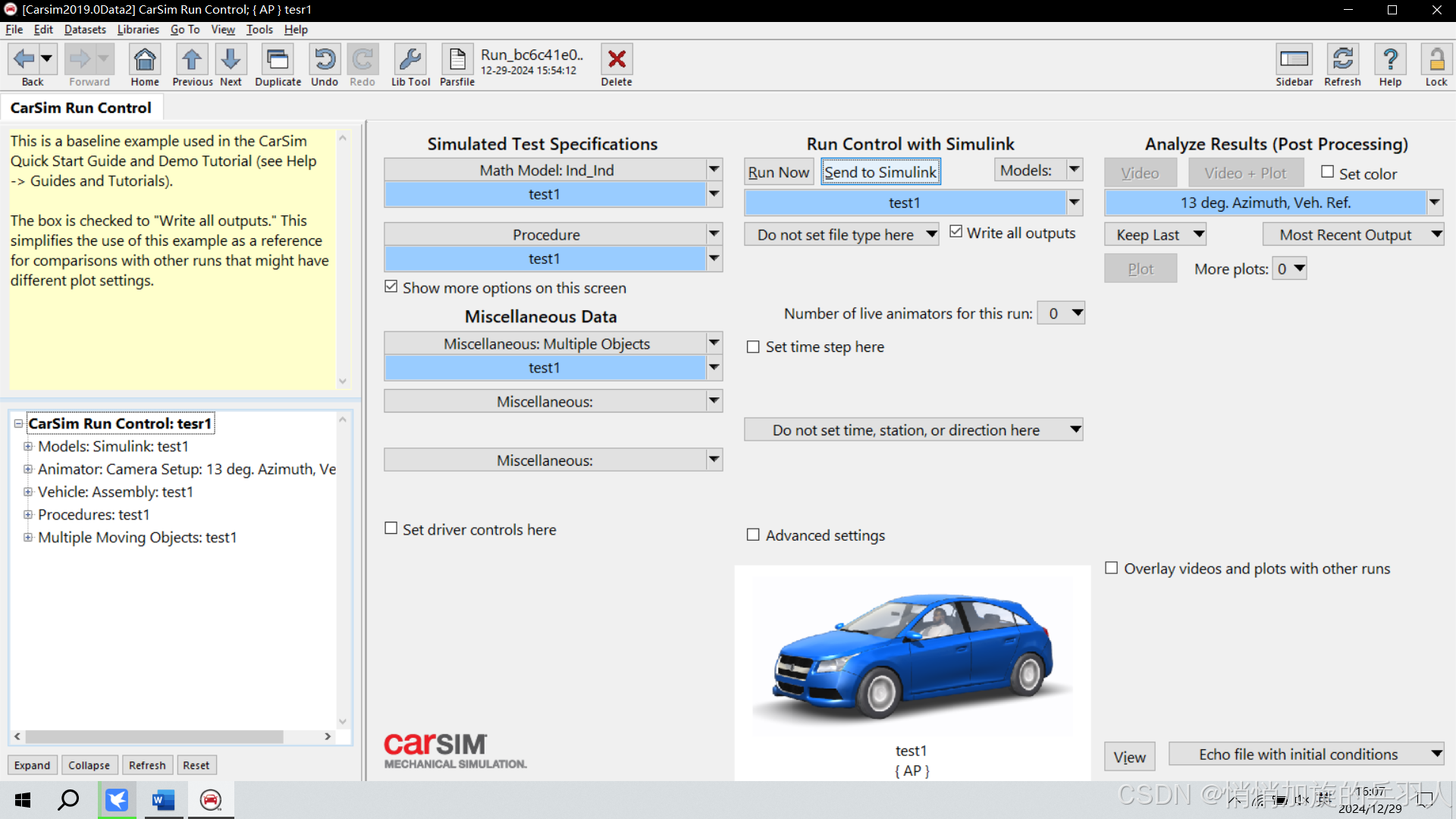
仿真时间设置
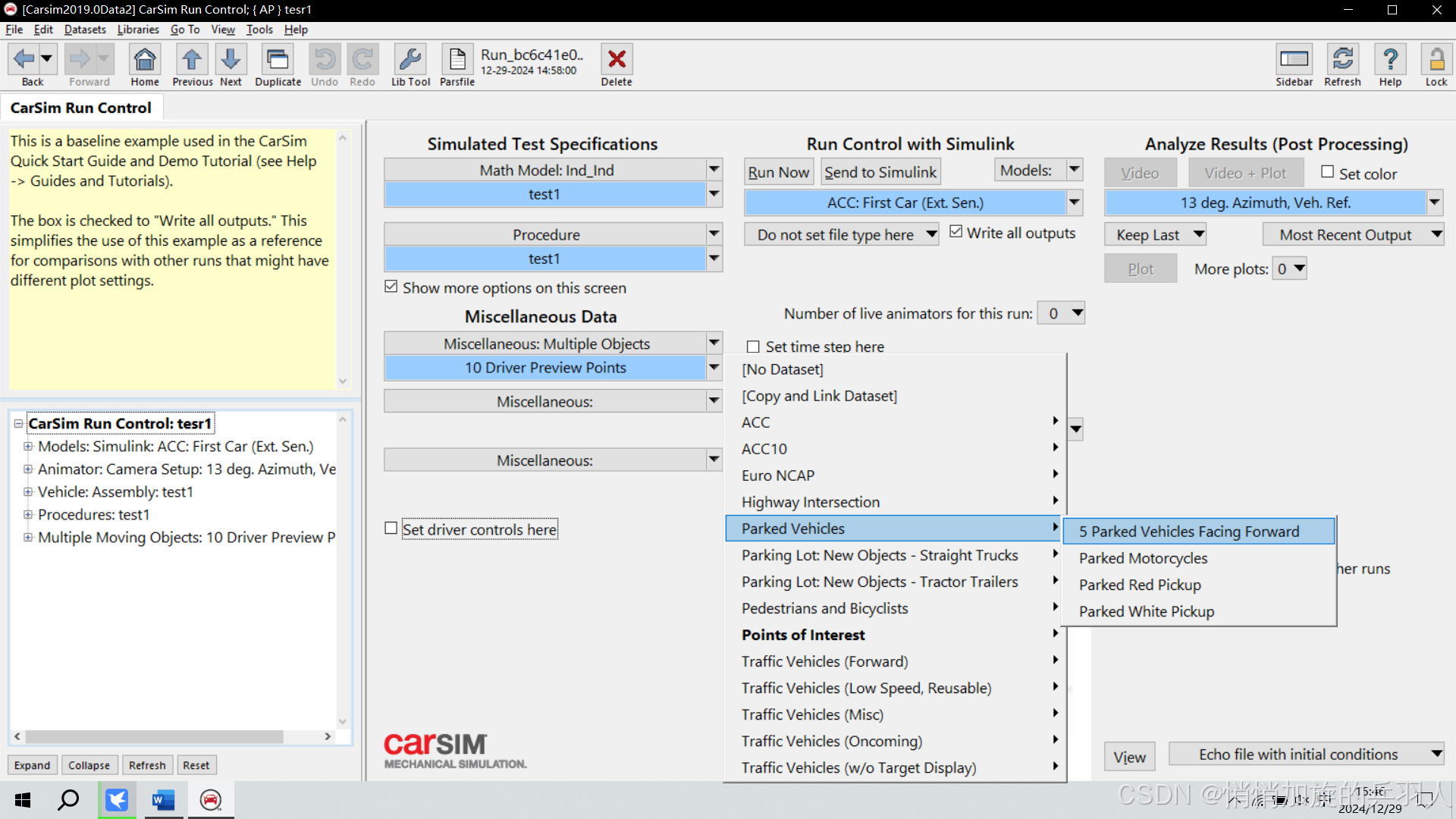
参考车选择 并复制
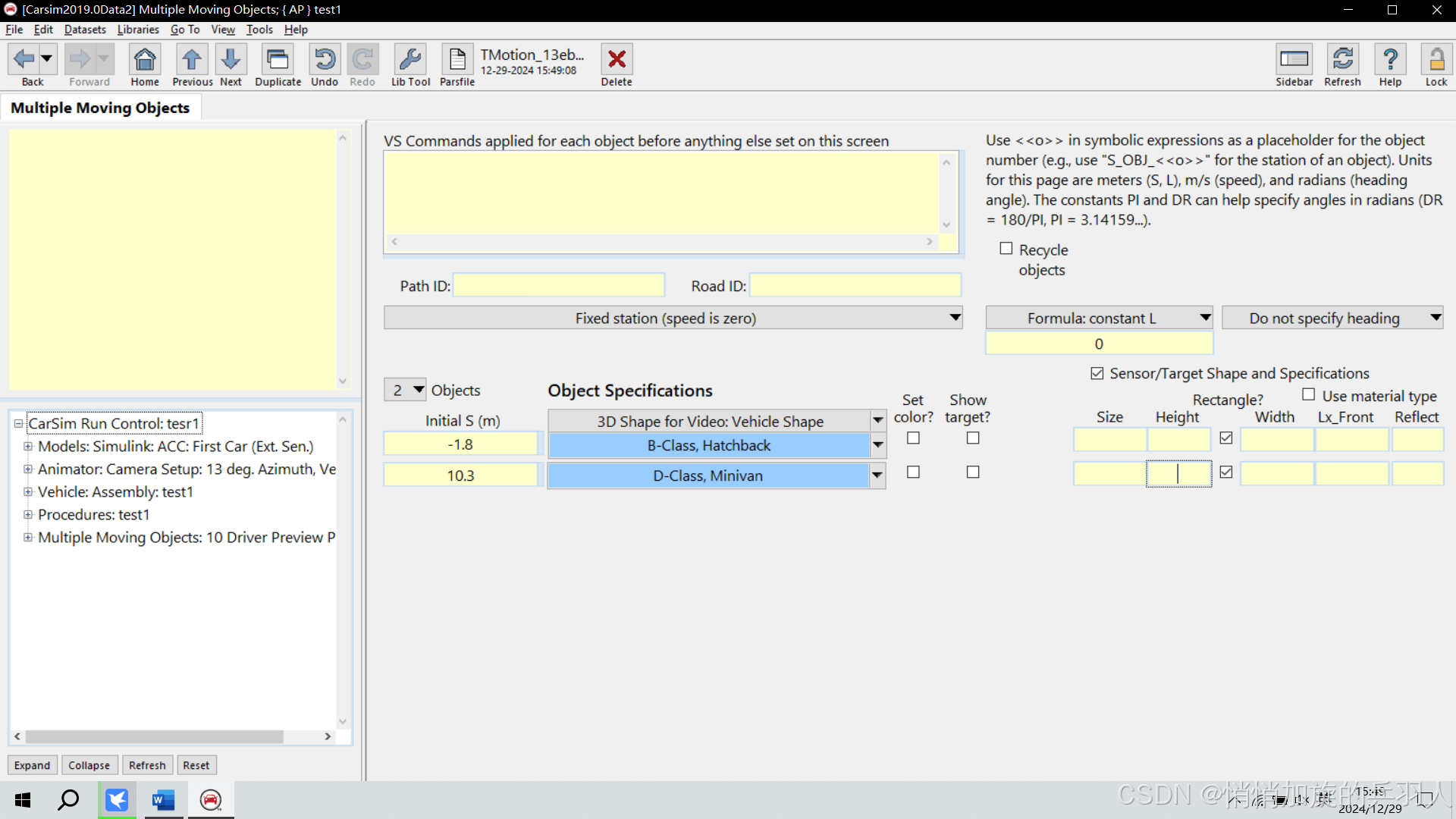
修改参数 最后联合仿真可适当调整位置
复制
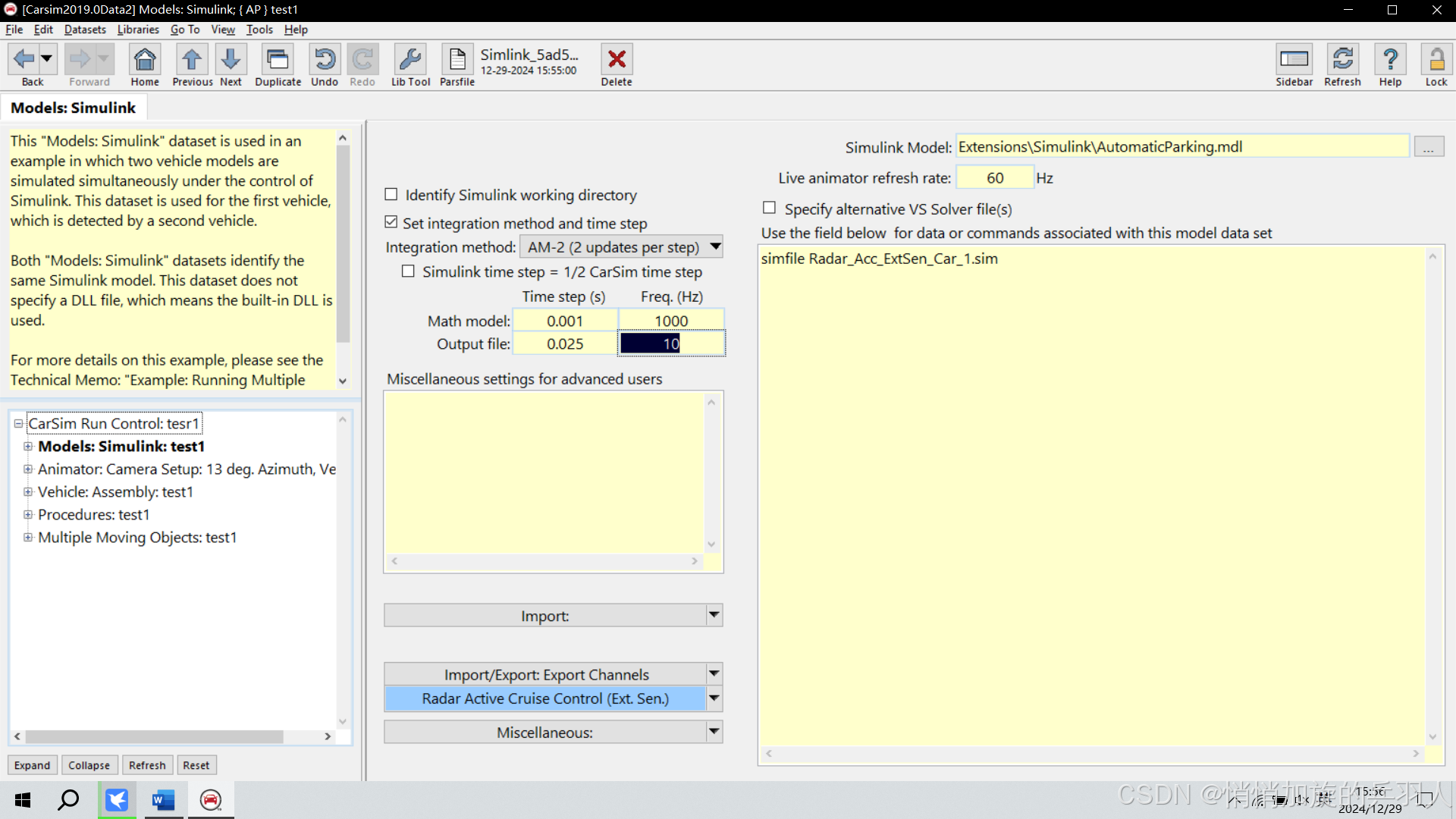
选择mdl文件 及仿真时间10s
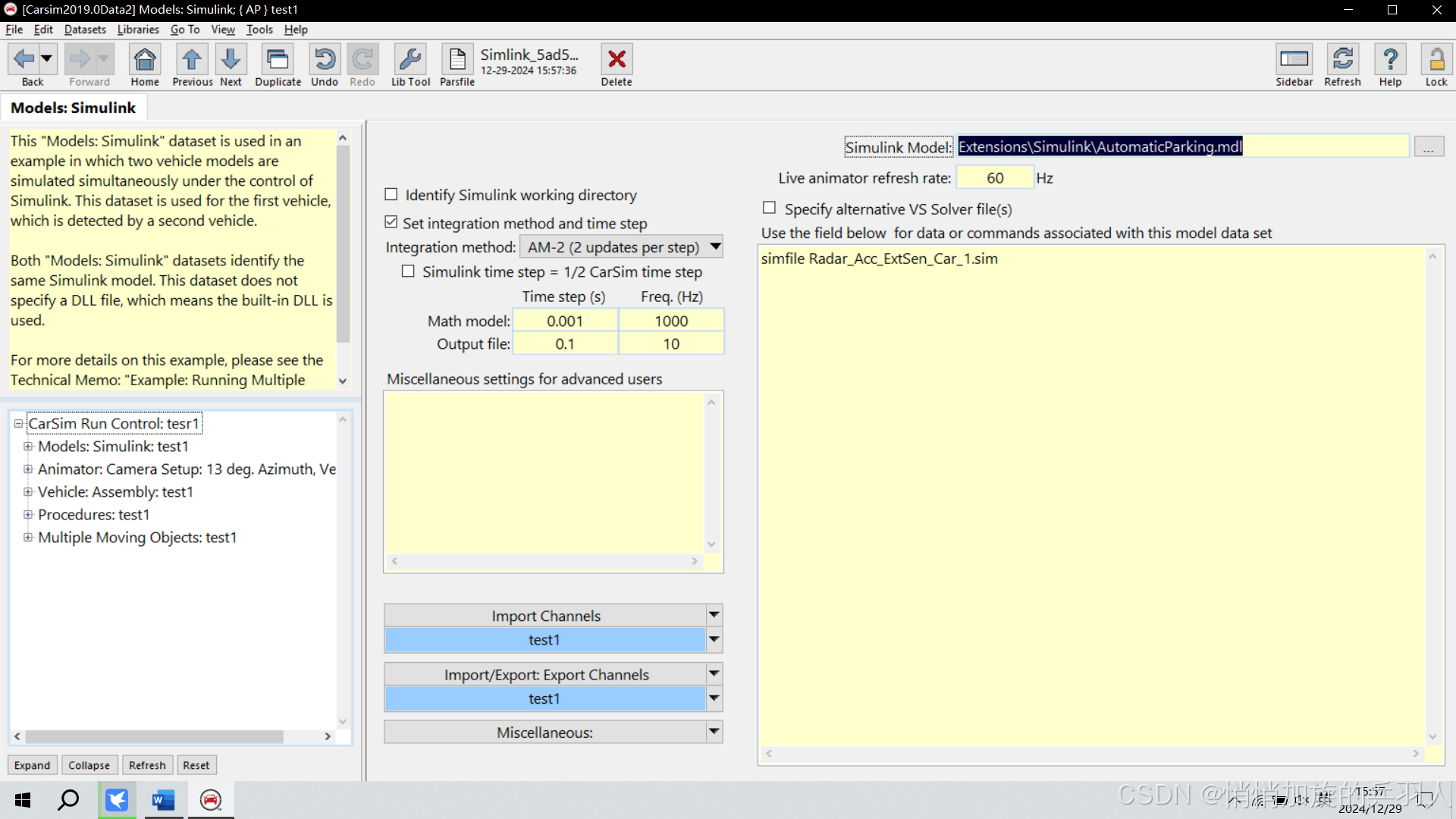
复制 输入 输出
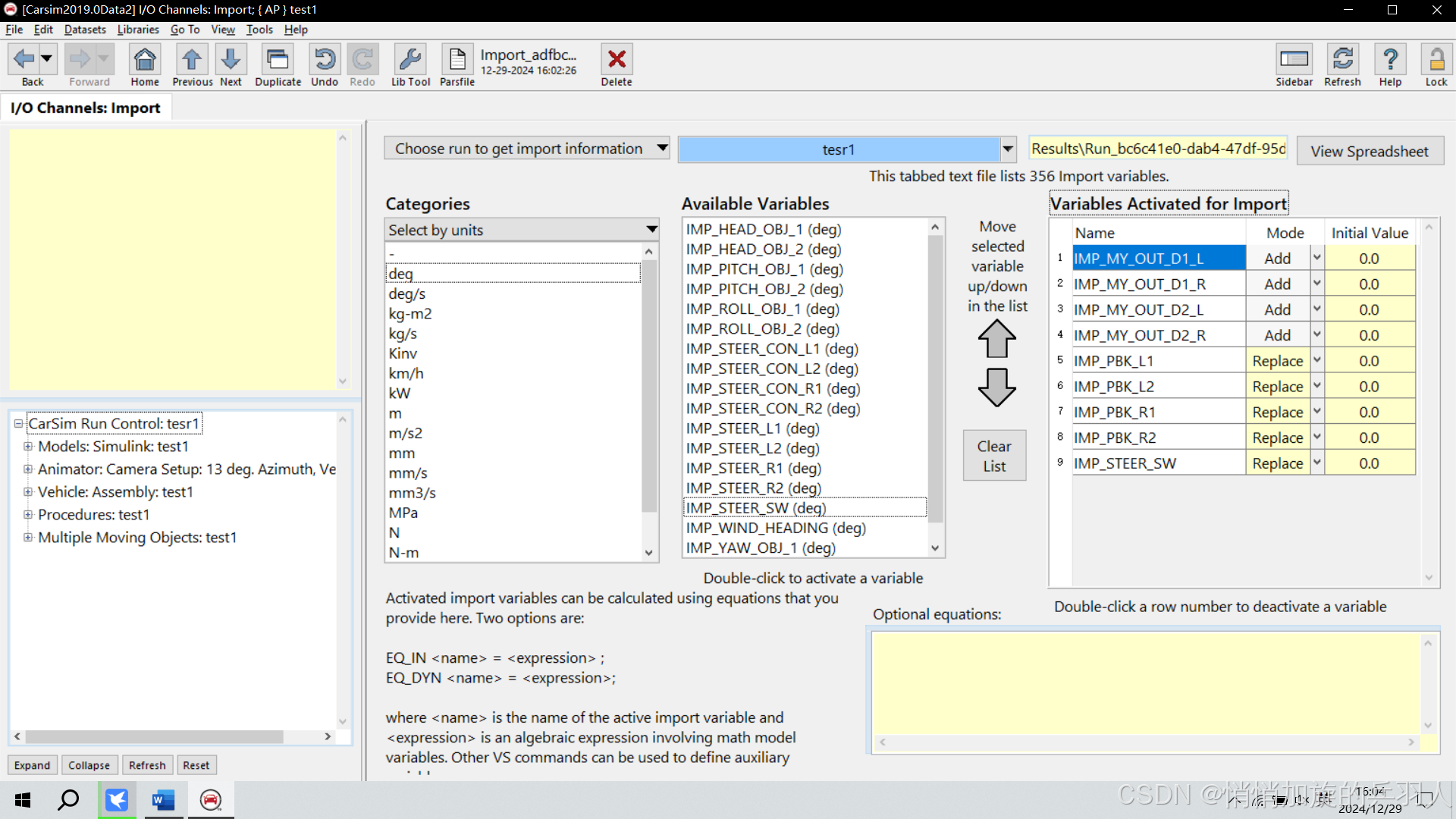
设置输入的四轮扭矩和轮胎压力及方向盘转角
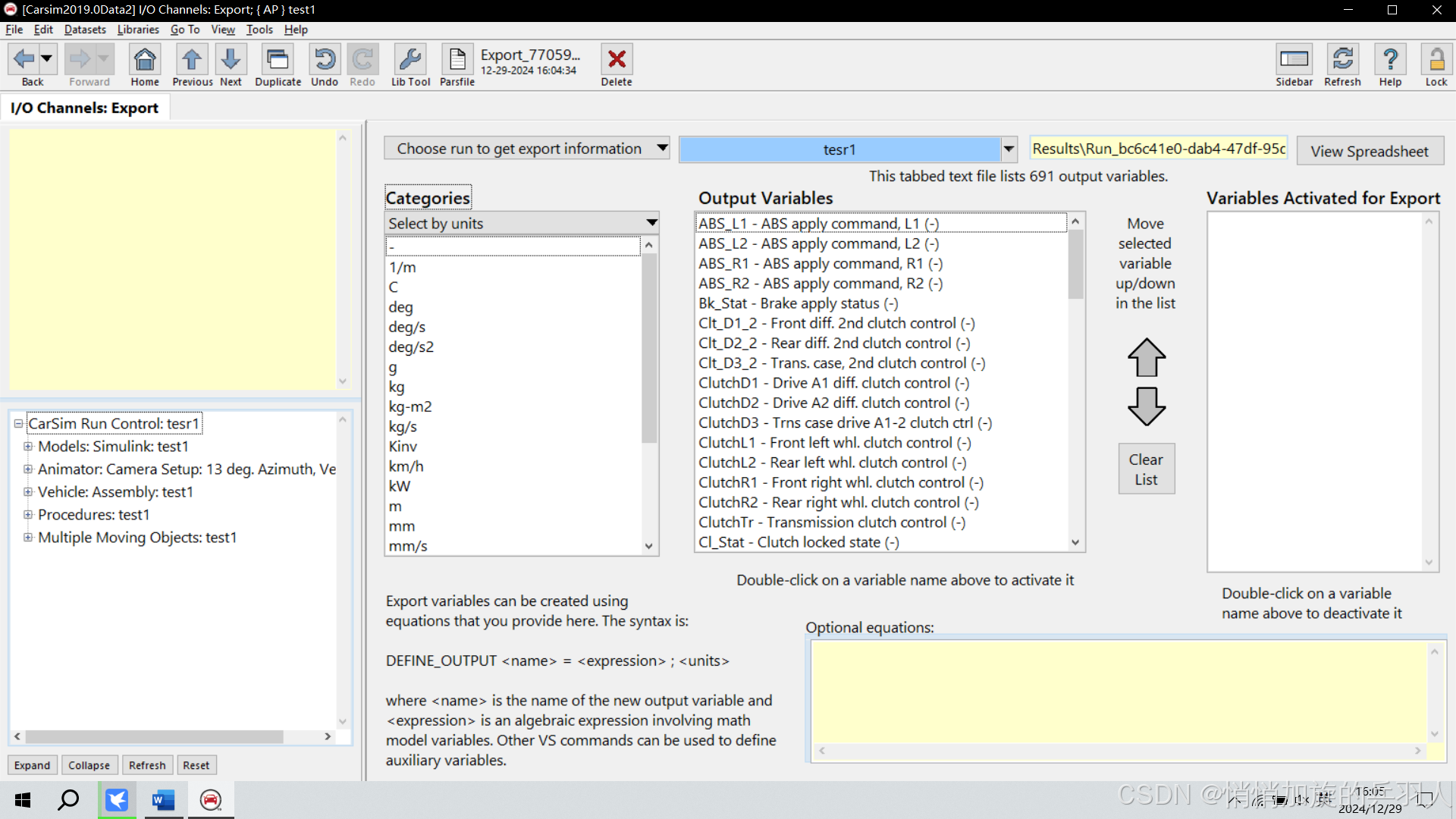
设置输出 这里只设置数据库就行,不设置输出值
To Simulink
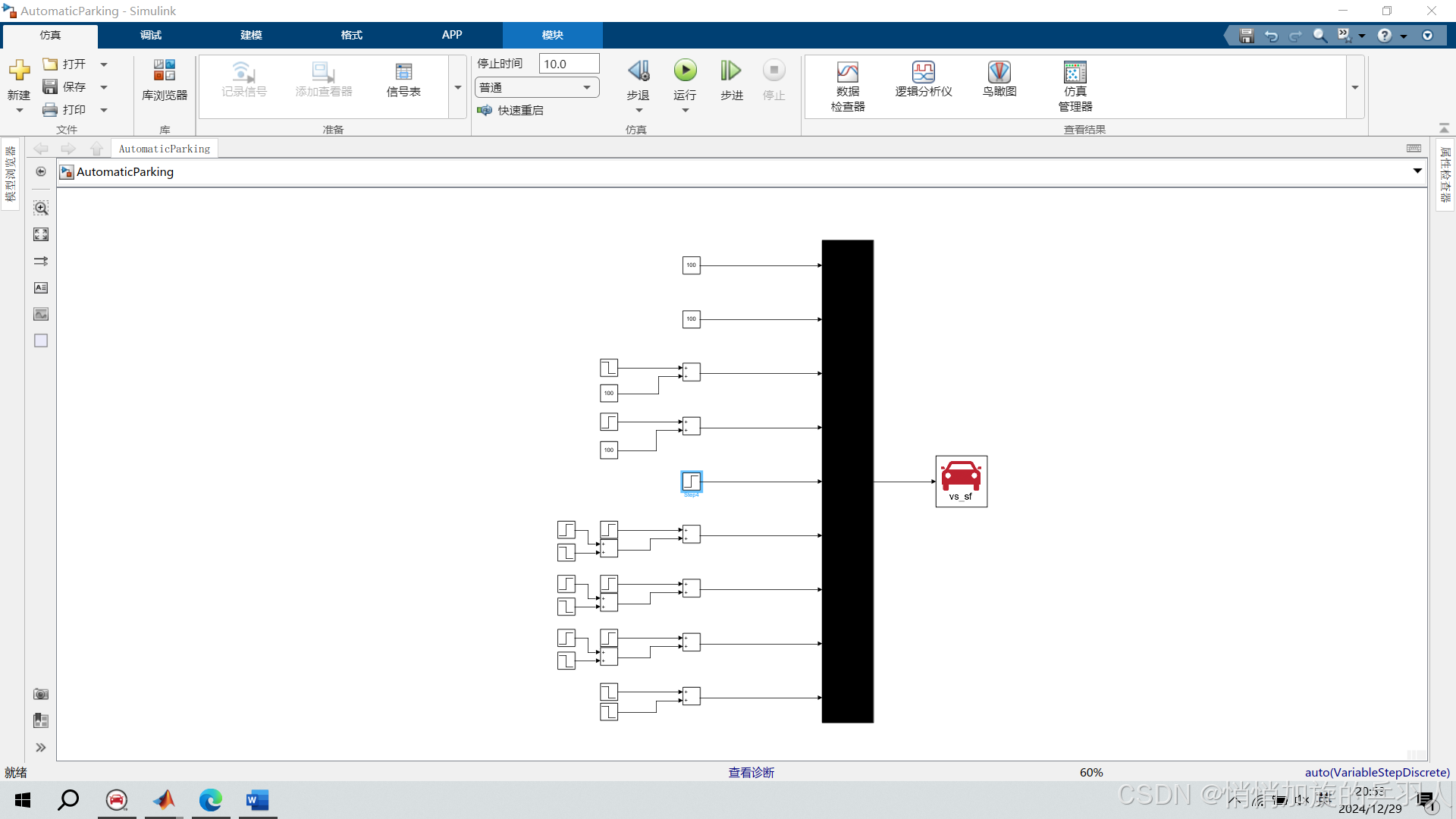
搭建车辆控制
PS:可观看视频理解参数调整思路

















 451
451

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









