







(1)CSI MIPI相机
高速差分信号线传输,常用4lane信号线1lane时钟线,时钟一般几百Mbps到Gbps,
最常见的就是现在手机上使用的相机普遍是这种接口的,而且这种接口相机也是现在使用最普遍的,
这也完全归功于手机行业的高速发展
特点:
a.高清高分辨率, 现在主流都已经是4k30fps,模拟的还在玩720p和1080p呢
b.信号稳定、差分信号抗干扰强
c.传输距离短,一般都是十几cm,所以一般需要长距离传输就用不了
(2)LVDS相机
高速差分信号线传输,一般信号线比较多,和CSI相机很类似,
不过使用不太普遍,而且我感觉开发难度比CSI相机大
特点:
和CSI相机类似
(3)dvp相机
顾名思义,dvp并口传输,像素点几位就是几根线,这种都是低分辨低帧率的相机,
一般用于对图像要求不太高的场景
特点:
低分辨率低帧率, 抗干扰性差,传输距离短
(4)USB相机
这个应该大家都了解,以前的PC机上插上就可以用,不过随着USB协议的发展,
现在高端的主流USB相机都是USB3.0接口的,
特点:
a. 使用方便,即插即用,都是基于标准UVC协议的
b. USB3.0协议的也可以传输高质量的图像数据
c. 不稳定,易掉线,这个也是最大的问题 (这个也是USB接口的通病)
(5) 车载ADAS相机
现在主流的车载ADAS相机接口是以下两种
a. FPDlink接口相机 (TI公司的串行器和解串器)
b.GMSL接口相机 (美信公司的串行器和解串器)
相机原理:
按我的理解其实就是在CSI相机的基础上加上了串行器和解串器,
使以前只能传输十几cm的传输距离,通过特殊的差分信号传输技术可以传输高达十几米远,
其实根源仍然是CSI相机
特点:
a.高清高分辨率高帧率
b.信号稳定、差分信号抗干扰强
c.传输距离长,高达十几米传输距离
d.硬件成本高,相机成本高,串行解串器和线成本也高
车载ADAD相机:
a. 需要长距离传输,高达几米到十几米传输距离
b. 信号抗干扰性强,这就使用差分信号比较合适
c. 高清高分辨率高帧率,不过目前720p30fps也很普遍
三. 总结
1.目前车上非ADAS相机一般都是使用的比较便宜的模拟相机,一般也就几十上百一个,
一般也就是用于倒车影像的,或者环视拼接倒车使用,这种模拟相机抗干扰性能就比较差。
2.目前车载ADAS相机其实还是起步阶段(是指fpdlink和gmsl),毕竟成本在那里,大批量落地比较难;
但是相信随着智能驾驶、ADAS、AI领域的快速发展,已经硬件成本的逐步降低,后续应该会慢慢爆发起来。
Camera系统 & Fpdlink相机概述
格式分类: RAW、YUV
接口分类: mipi、fpdlink、GMSL
分辨率: 1080p、720p
nvidia camera系统架构介绍
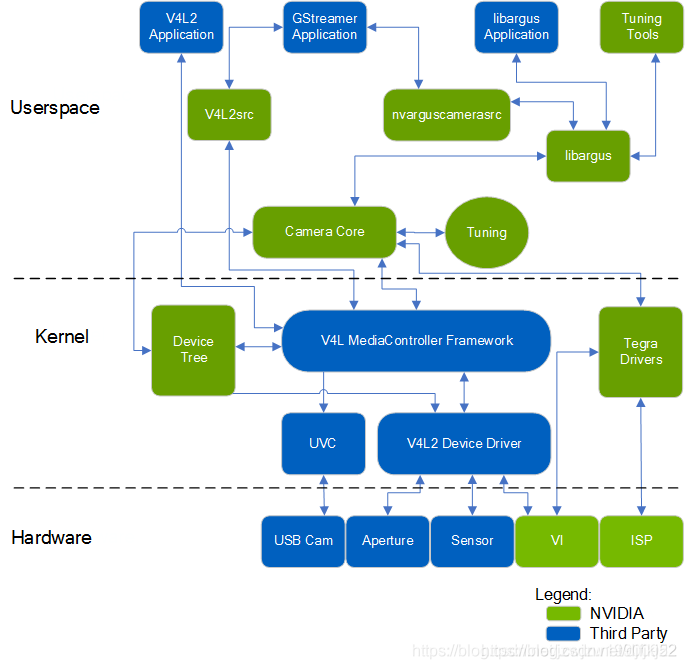
(1)libargus
提供一系列API进行深度开发,编解码、视频采集、视频处理等
(2) nvarguscamerasrc
这个主要是用来对接Gstream框架,使用Gstream那套接口
(3)v4l2src
Linux标准V4L2框架,上图的蓝色部分,也是最普及方便第三方开发的,但是就用不了板端ISP了(不过这个ISP第三方也没法调,除非和NVIDIA深度合作);
这个是最推荐的方法,因为可以考虑用前端ISP嘛,所以这条路开发起来最快
硬件连接
 上图可以看出最多支持6路硬件通路,前端CSI接口组合可以使用1、2、4lane连接
上图可以看出最多支持6路硬件通路,前端CSI接口组合可以使用1、2、4lane连接
Bayer sensor
由于Bayer sensor需要使用板端ISP,而ISP tuning这部分代码和工具是不开源的,如果想开发Baye
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 5853
5853

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









