






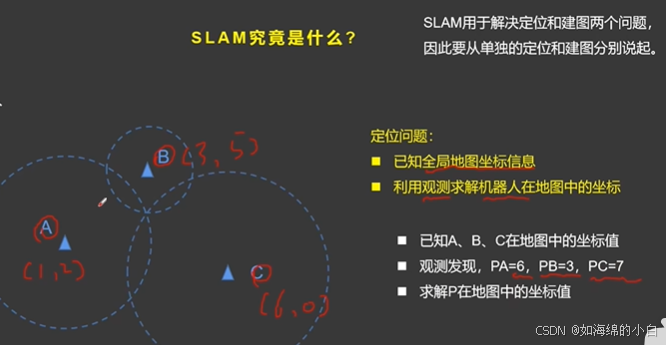
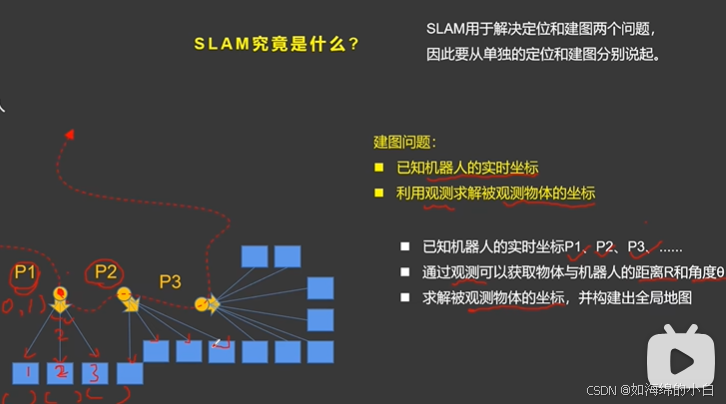
一、SLAM
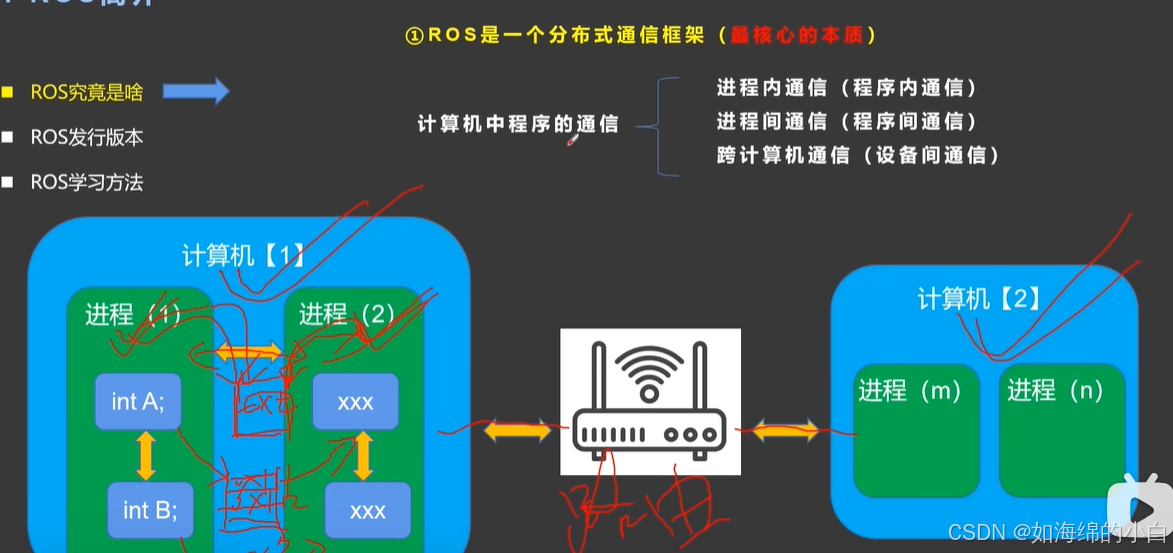
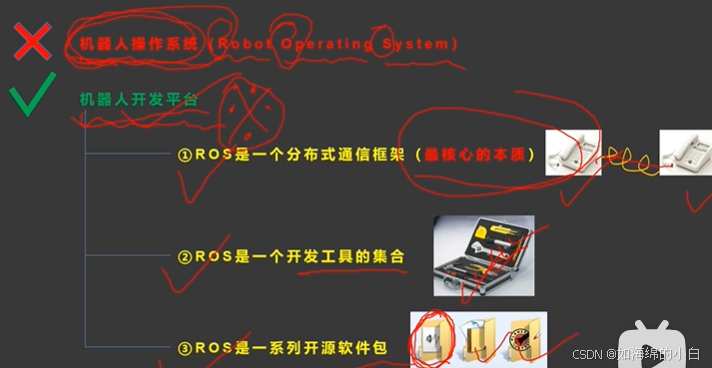
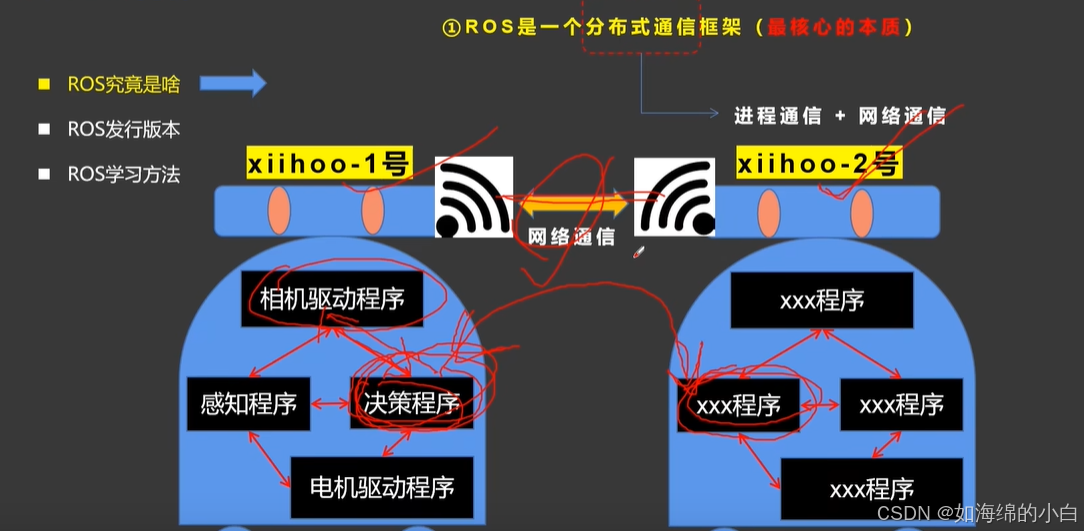
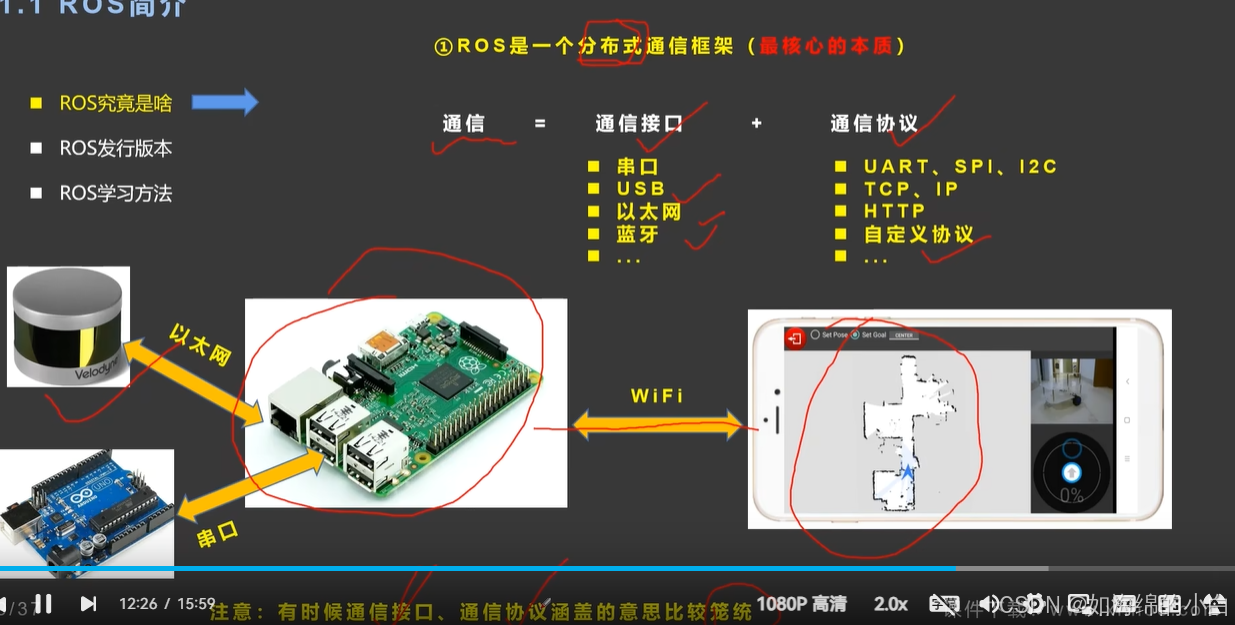
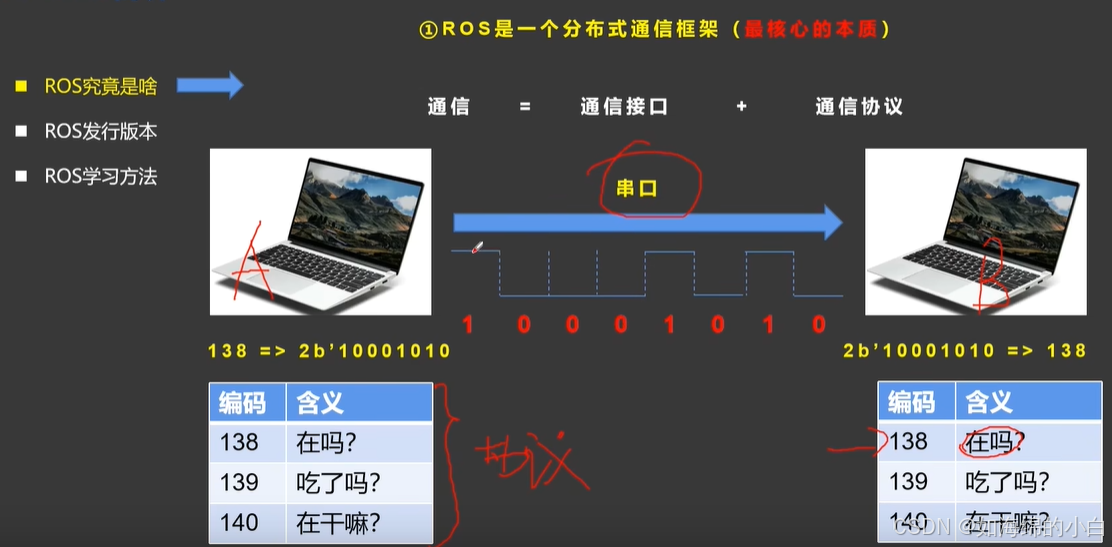
二、ROS
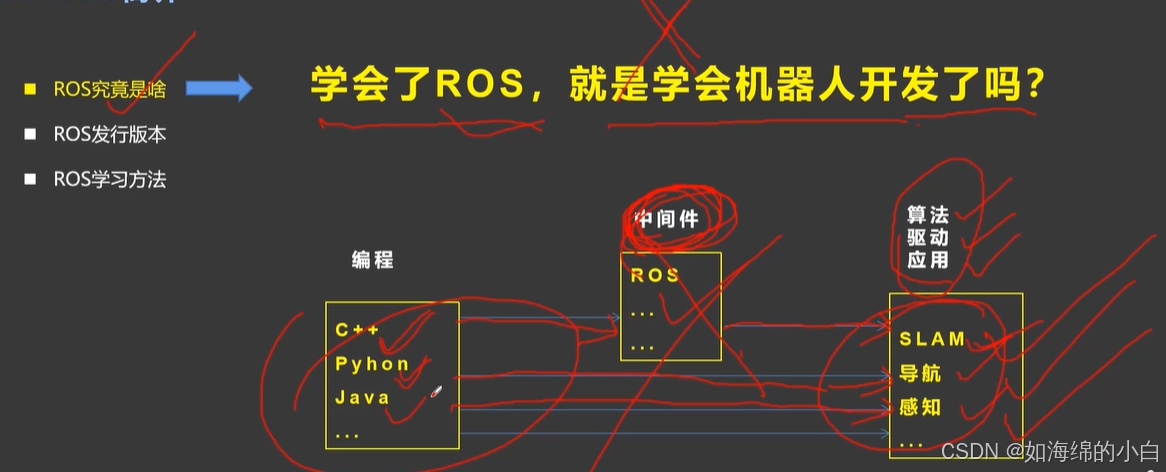
实际上还是C++,python Java开发
三、ROS系统框架
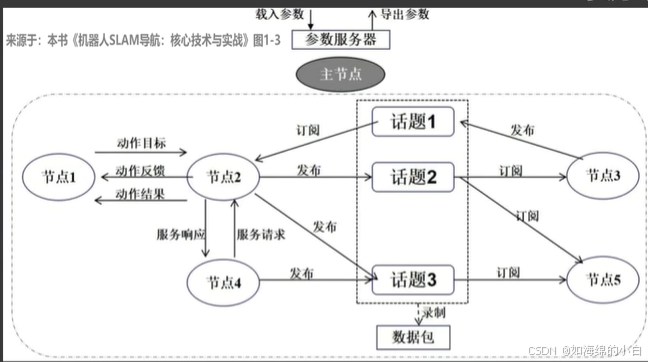
三种方式:
1.节点到话题,话题到节点
2.服务。节点通过服务请求,服务响应
3.动作。
内容:
1.ROS系统架构中,程序=进程=节点
2.消息:节点到节点发送的内容
3.数据包:录制的话题集合
4.参数服务器:用来配置全局参数
5.主节点:用来管理通信中的各种细节
实际上还是C++,python Java开发
1.节点到话题,话题到节点
2.服务。节点通过服务请求,服务响应
3.动作。
1.ROS系统架构中,程序=进程=节点
2.消息:节点到节点发送的内容
3.数据包:录制的话题集合
4.参数服务器:用来配置全局参数
5.主节点:用来管理通信中的各种细节
 715
512
661
804
715
512
661
804

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























