






目录
vVIRTUALtarget 在 AUTOSAR 开发阶段中的支持
往期推荐
- ETAS工具链自动化实战指南<一>
- ETAS工具链自动化实战指南<二>
- ETAS工具链自动化实战指南<三>
- AUTOSAR工程师必读:Artop的核心功能
- Vector工具链自动化实战指南<一>
- isolar高手秘籍| ECU Configuration三分钟速成!
- 掌握核心步骤:RTA-BSW以太网配置全解析
- 一文详解TC399 CAN MCAL 配置
- LSL常见应用场景及示例<一>
- LSL常见应用场景及示例<二>
- LSL常见应用场景及示例<三>
- 为什么Autosar钟情arxml而非json?大揭秘!
- 深入浅出:SOME/IP-SD的工作原理与应用
- 【技术进阶】|一文掌握Autosar ComStack的精髓!
- Autosar培训笔记整理<一>
- 【AutoSAR进阶】|实战详解ETAS工具链UDS 0x2f服务核心配置!
- 实战详解ETAS工具链CanTp模块自动化配置
- 一文掌握5种常见的AUTOSAR 错误类型
- 【AUTOSAR工程师必备知识】一文搞懂AUTOSAR架构9种通信方式
- 实战干货|详解ETAS工具链之 intra-ECU通信的数据转换
在现代汽车开发中,随着电子控制单元 (ECU) 的复杂性不断增加,以及软件定义汽车趋势的增强,早期软件验证和开发已变得至关重要。然而,硬件 ECU 的开发和制造通常需要较长时间,这可能导致软件开发延迟。为了解决这一问题,虚拟化技术(Virtualization)被引入汽车软件开发中。
autosar软件开发与测试中的常见挑战
-
开发与测试进度不匹配:
-
开发人员按时交付软件,但测试团队因硬件或工具限制,无法及时完成测试。
-
导致软件错误直到硬件可用时才被发现,增加了修改和调试的成本。
-
-
需求解释差异:
-
开发人员对需求的理解可能与预期不一致,导致功能原型测试时发现偏差。
-
需求调整后,需重新修改和测试软件,增加了迭代次数。
-
-
硬件依赖性:
-
现场硬件的可用性受限,测试时发现硬件错误导致开发流程停滞。
-
测试周期依赖于昂贵的硬件和测试设备。
-
-
测试压力增加:
-
随着量产临近,测试工程师需要处理大量问题报告和错误消息,压力显著增大。
-
Vector 虚拟化解决方案-vVIRTUALtarget
为了解决上述问题,Vector 开发了 vVIRTUALtarget 虚拟化工具,提供 Basic 和 Pro 两个版本。
Vector vVIRTUALtarget是一款用于虚拟化单个软件组件和全配置ECU的软件,适用于所有典型的AUTOSAR项目,在整个ECU开发过程中为功能和软件开发工程师、软件集成工程师和测试工程师提供支持。
Vector vVIRTUALtarget 用于创建和运行基于 AUTOSAR 的 V-ECU,支持与 CANoe 集成进行通信仿真,它通过提供虚拟的 ECU 环境,使开发人员可以在没有实际硬件的情况下进行软件的开发、调试及验证。
vVIRTUALtarget应用领域
-
在开发的早期阶段就借助抽象通信测试单个软件组件或软件组件之间的交互作用
-
将应用代码和基础软件虚拟集成到整个系统中
-
在功能软件的设计和实施过程中同步测试
-
在虚拟基础上测试和验证软件集成
-
使用vECU进行的测试验证,可以在实际ECU上进一步使用
vVIRTUALtarget 的功能与特点
-
早期开发阶段的功能验证:
-
在硬件不可用时,支持开发人员在初期测试软件功能,确保软件逻辑与需求的一致性。
-
利用标准化的 AUTOSAR 接口,模拟基础软件和软件组件(SWC)之间的交互行为。
-
-
无缝集成 CANoe 测试工具:
-
CANoe 提供了强大的测试和分析功能,与 VT Pro 完美结合,实现从单个 SWC 到整个系统的功能验证。
-
可以在虚拟环境中观测并测试所有 AUTOSAR 接口,快速检测异常。
-
-
硬件无依赖:
-
无需真实硬件或昂贵设备即可运行完整的软件测试。
-
开发团队和测试团队可以在同一个虚拟环境中验证软件,减少沟通和协作成本。
-
-
加速错误检测与修复:
-
提早发现软件逻辑错误或需求偏差,降低后期集成和量产阶段的返工压力。
-
提供自动化测试功能,支持对复杂功能进行高效测试。
-
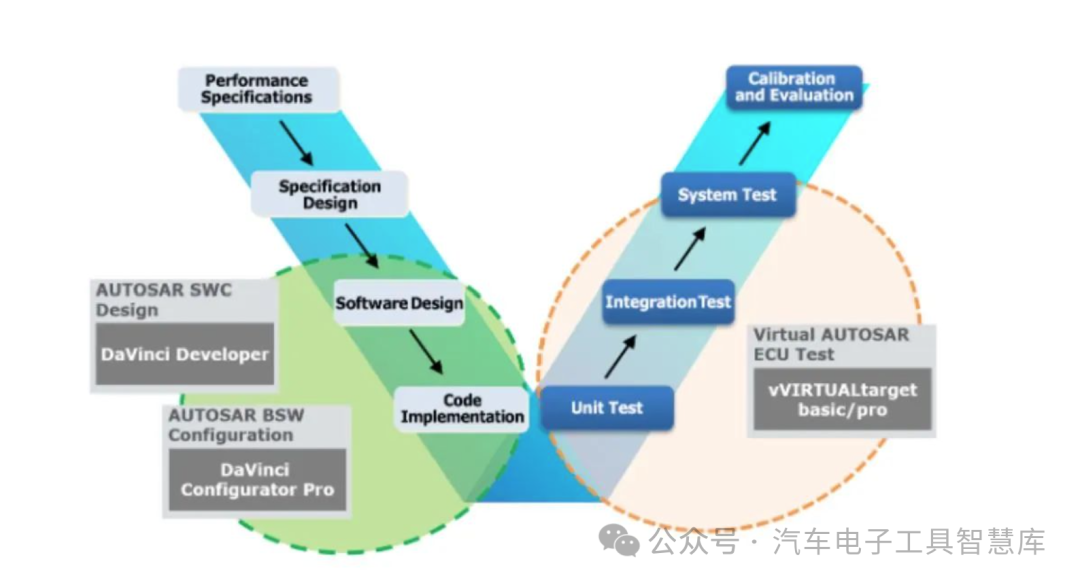
vVIRTUALtarget 在 AUTOSAR 开发阶段中的支持
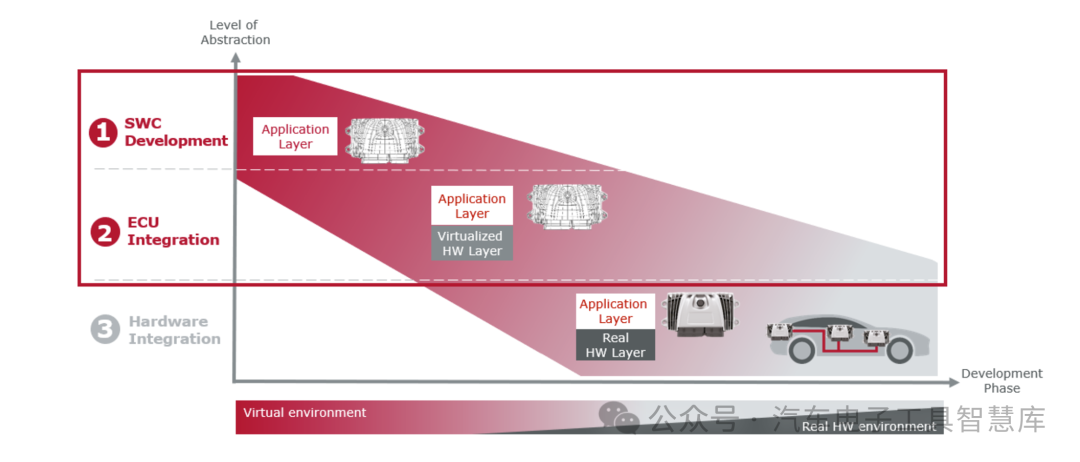
vVIRTUALtarget 通过模拟 AUTOSAR 的执行环境和基础软件行为,支持从 SWC(软件组件)开发到完整 ECU 集成的不同开发阶段。以下是其在两个重要阶段的作用和支持:
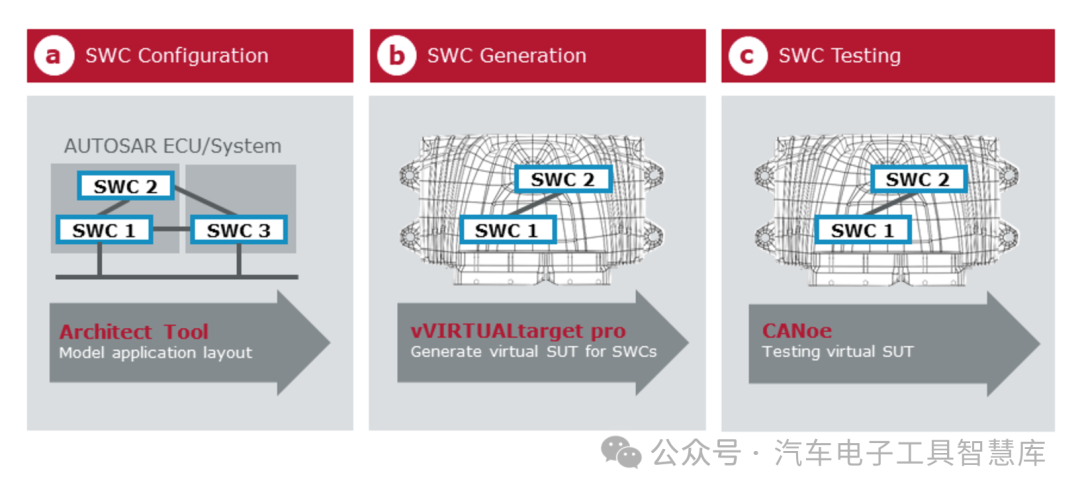
第1阶段:SWC开发
支持目标:
在早期开发阶段,为 AUTOSAR 软件组件(SWC)的设计和功能验证提供虚拟化环境。
核心功能:
-
-
虚拟化执行环境:
-
vVIRTUALtarget Pro 提供标准化的 AUTOSAR 接口,自动将单个或多个 SWC 连接到虚拟执行环境中,无需配置底层基础服务。
-
模拟典型的 AUTOSAR 基础软件行为(如通信、任务调度、诊断服务)。
-
-
灵活的服务控制:
-
工程师可自定义关键管理层服务,例如:
-
模拟 ECU 唤醒行为。
-
配置 AUTOSAR 任务与 Runnables 的调度。
-
-
支持更高精度的功能测试和验证。
-
-
早期错误检测:
-
在硬件不可用的情况下,通过虚拟化测试 SWC 功能,提前发现需求解释错误或逻辑缺陷。
-
避免后续开发阶段的重大返工
-
-
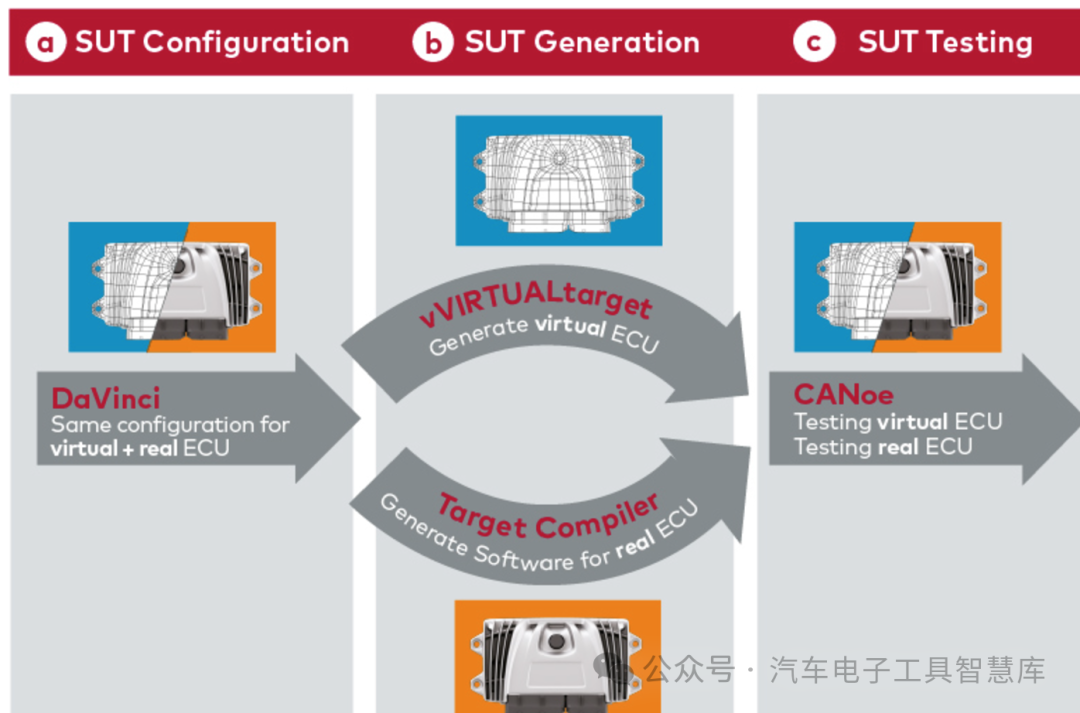
第2阶段:ECU集成
支持目标:
在 ECU 开发阶段,虚拟化工具用于整合基础软件和应用软件,验证完整 ECU 的行为。
核心功能:
-
基础软件虚拟化:
-
结合 DaVinci Configurator Classic 工具,使用真实 ECU 的配置生成虚拟 ECU(vECU)。
-
硬件相关部分被替换为虚拟元素,无需重新配置即可快速生成测试环境。
-
-
完整的系统集成测试:
-
vVIRTUALtarget Pro 和 Basic 提供虚拟 ECU 的执行支持。
-
在虚拟化的 ECU 上运行基础软件(BSW)和应用软件(SWC),测试系统的集成和功能。
-
-
测试环境与工具链集成:
-
生成的虚拟 ECU 可以在 PC 环境中运行,例如在 CANoe 中用于仿真和分析。
-
模拟网络消息、I/O 信号及真实 ECU 的行为,进行全面的系统级验证。
-
-
加速开发和验证:
-
通过虚拟化,测试工程师可以在硬件交付前完成大部分功能验证。
-
减少硬件依赖和昂贵的设备成本。
-
总结
Vector vVIRTUALtarget 可在 AUTOSAR 软件开发的各个阶段为不同角色提供支持,从早期开发到测试、再到集成。它通过虚拟化技术消除了对物理硬件的依赖,提升了开发效率、降低了成本,并帮助各个团队成员更高效地协同工作。


















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









