




 本文介绍如何使用Matlab中的cameracalibration工具箱完成相机标定。通过加载20张不同角度的标定板图像,并选择合适的计算选项,如2Coefficients与Skew和TangentialDistortion等,进行相机标定。文中详细解释了如何导出标定结果,包括内参矩阵、焦距、主点等关键参数。
本文介绍如何使用Matlab中的cameracalibration工具箱完成相机标定。通过加载20张不同角度的标定板图像,并选择合适的计算选项,如2Coefficients与Skew和TangentialDistortion等,进行相机标定。文中详细解释了如何导出标定结果,包括内参矩阵、焦距、主点等关键参数。
matlab相机定标
使用matlab中camera calibration 工具箱可以完成相机标定的工作。
1、首先固定相机,对不同旋转角和俯仰角的标定板成像,大概在20张左右。
2、点击下图中的Add Images,将图片加载进来。

3、选择 2 Coefficients与3 Coefficients的计算结果会有所不同,查阅别的资料,是选择2 Coefficients比较好。可选择Skew与Tangential Distortion来选择是否计算偏斜系数与切向畸变。

4、点击Calibrate可进行相机标定的工作。
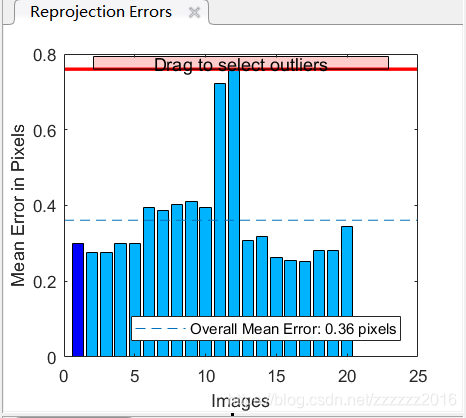
5、标定结果如下图所示,一般误差小于0.5即可接受。
6、点及 Export Camera Parameters可以将标定的结果导出。在matlab的主页面可查看。
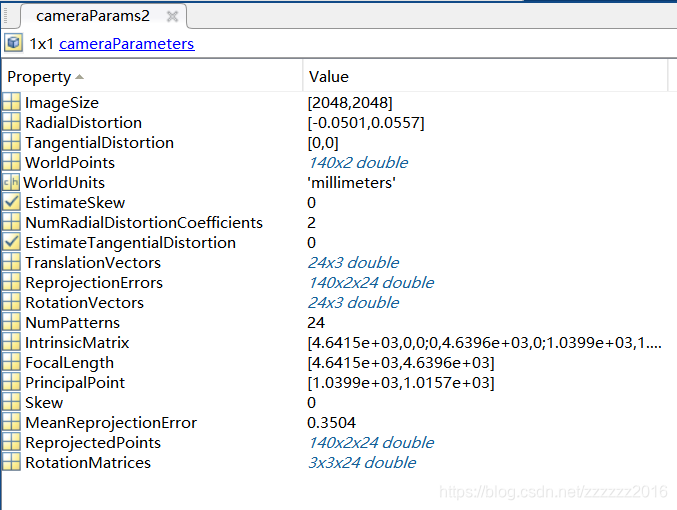
其中:
内参矩阵: Intrinsic Matrix
焦距: Focal Length 分别为f/dx与f/dy,单位为pixel
主点: Principal Point
径向畸变: Radial Distortion 分别为K1,K2,K3默认为0
切向畸变: Tangential Distortion 分别为P1,P2,在未点击步骤3中计算该值时,默认为0
旋转矩阵: Rotation Matrices 每个棋盘格坐标系相对于相机坐标系的旋转矩阵
平移向量: Translation Vectors 每个棋盘格坐标系相对于相机坐标系的旋转矩阵
平均重投影误差: Mean Reprojection Error
重投影误差: Reprojection Errors
重投影点: Reprojected Points
- 参见https://blog.youkuaiyun.com/qq_37791134/article/details/80942171计算焦距
- 棋盘格坐标系转换到相机坐标系,即左乘旋转矩阵再加平移向量
相机相关参数
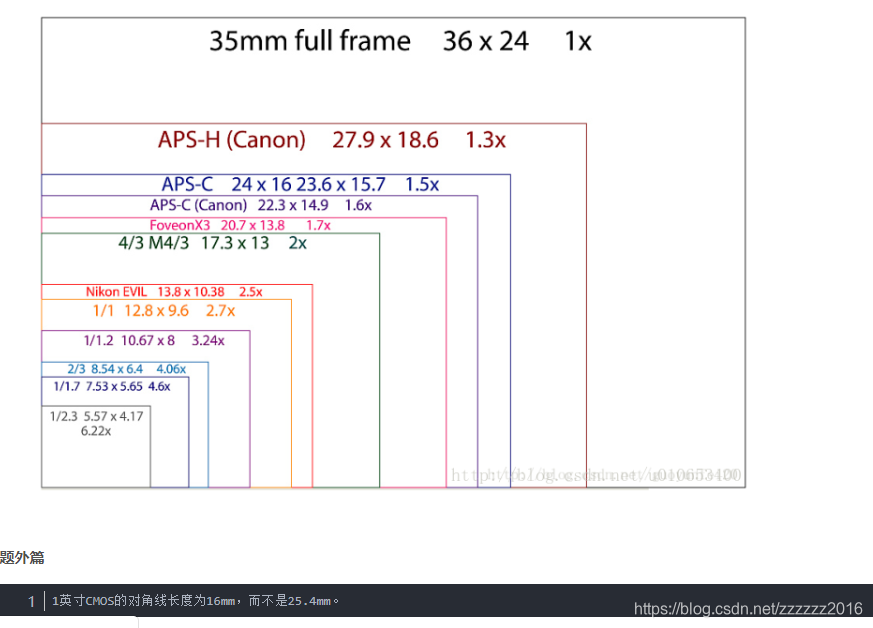
sensor size 1’’(英寸),大小是12.8mm

















 1922
1922




 到【灌水乐园】发言
到【灌水乐园】发言







