







目录
Camera感知
不同的Camera的结构和成像方式略有不同,但大部分的Camera成像原理可以用下图来表示:
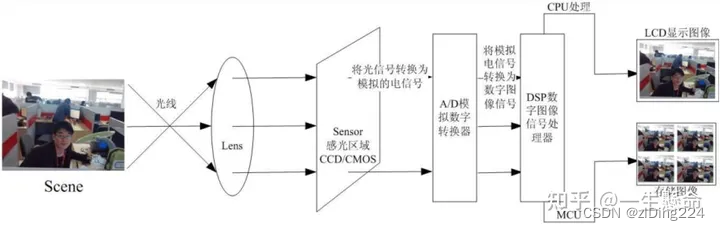
景物反射(或发出)的光线通过镜头(Lens)照射至传感器(Sensor)表面,然后将光信号转换为模拟电信号,经过数模转换(A/D),将模拟信号转换为数字信号,传递至数字图像信号处理器(Digital Signal Processor,DSP)进行加工处理,通过I/O接口传出到CPU进行处理,再通过LCD显示图像。
镜头Lens
对于摄像头或者相机来说,镜头并非只有一个,而是多种凸透镜、凹透镜、平面镜的组合系统,此时就会发生畸变,成像模型为非线性模型,需要进行矫正,这也是摄像头标定的意义之一。一个摄像头的成像效果好不好,很大部分程度取决于镜头的光学参数,主要包括:有效焦距、光圈、最大像面、视场角、畸变、相对照度等。
小孔成像 Pinhole
小孔成像是最早的一种可以进行清晰成像的成像机制:假设空间中有一个房子,在房子远处有一个像平面,在像平面和房子中间摆放了一个不透光的薄片,薄片的中有一个非常小的小孔,当有光线照在房子上时, P 0 P_0 P0 处反射出来的光线会穿过小孔到达像平面的 P i P_i Pi 处,房子上的每一点反射出来的光线都会在像平面上有唯一的一个对应点,这样就在像平面上对房子完成了清晰成像。
以小孔中心作为坐标系原点,Z轴方向指向像平面,将小孔到像平面的距离称为有效焦距,记为 f f f。小孔成像遵循透视模型 (Perspective Imaging), 即空间中的一点 ( x 0 , y 0 , z 0 ) (x_0,y_0,z_0) (x0,y0,z0)与像平面上的对应点 ( x i , y i , f ) (x_i,y_i,f) (xi,yi,f)满足如下关系,从上述对应关系也可以看出,这种成像机制会损失物体的深度信息。 x i f = x 0 z 0 , y i f = y 0
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 6672
6672

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









