







 本文分析了LOAM存在的地图存储、大场景漂移及优化效率问题,提出通过在因子图中整合激光里程计、IMU预积分、GPS和回环约束,实现紧耦合优化。作者详细描述了新算法的四个关键因子及其在软件系统中的应用,实验表明算法性能受地图稠密度影响较大。
本文分析了LOAM存在的地图存储、大场景漂移及优化效率问题,提出通过在因子图中整合激光里程计、IMU预积分、GPS和回环约束,实现紧耦合优化。作者详细描述了新算法的四个关键因子及其在软件系统中的应用,实验表明算法性能受地图稠密度影响较大。
LOAM存在的问题
(1)地图的存储方式导致难以检测回环以及增加其他传感器信息
(2)在大场景情况下会漂移
(3)在特征丰富环境,voxel_map 会变得稠密,导致优化没有效率
核心思想
将激光里程计,IMU 预积分,GPS,回环等约束添加到因子图中,从而实现紧耦合的优化
软件系统框图
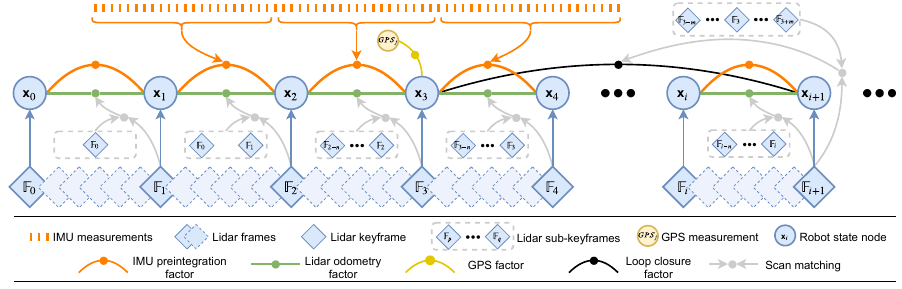
四种因子
IMU 预积分
IMU 预积分可以用来 de-skews 当前帧点云
激光里程计
(1)与 LOAM 或者 Lego-LOAM 一样提取线面特征
(2)利用局部关键帧构建 voxel map:选择距离当前关键帧最近的 n 个关键帧,将其线面特征进行合并形成地图
(3)与 LOAM 一样寻找当前关键帧与局部地图的匹配关系,并进行优化求解(利用 IMU 预积分作为初始值),从而获得与上一个关键帧的相对位姿
(4)根据位姿变化选取关键帧(保持因子图的稀疏)
注:激光里程计可以用于估计 IMU 的 bias
GPS
将 GPS 数据转换到局部笛卡尔坐标系
注:这里作者发现误差变化缓慢,所以只是在位姿估计的协方差大于 GPS 协方差时才添加 GPS 因子
回环
利用欧式距离检测回环,但也可以用其他方法
选择距离当前关键帧15m内的关键帧作为回环帧,然后选择回环帧前后
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 8863
8863

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









