




Dota开源目标检测数据集
DOTA-v1.5包含16个类别中的40万个带注释的对象实例,这是DOTA-v1.0的更新版本,它们都使用相同的航拍图像,但是DOTA-v1.5修改并更新了对象的注释,其中许多在DOTA-v1.0中丢失的10像素以下的小对象实例已被另外注释,DOTA-v1.5的类别也得到了扩展。
具体地说,增加了集装箱起重机的类别。与DOTA-v.1.0一致,DOTA-v1.5中的图像主要来自中国资源卫星数据和应用中心、Google Earth,卫星JL-1和卫星GF-2。使用来自Google Earth的图片必须遵守相应的使用条款:“Google Earth”使用条款。 DOTA-v1.5中的所有图像及其相关注释仅可用于学术目的,但禁止任何商业用途。
目标类别:
DOTA-v1.5中的对象类别包括:飞机,船舶,储罐,棒球场,网球场,篮球场,地面场地,港口,桥梁,小型车辆,大型车辆,直升机,环形交叉路口,足球场,篮球 法院和集装箱起重机。
标注格式:
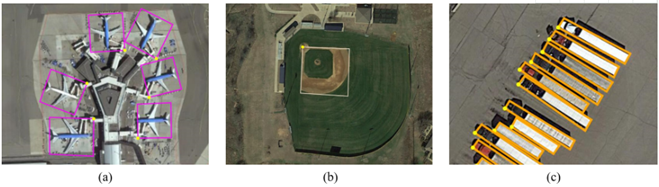
在数据集中,每个实例的位置由四边形边界框注释,可以表示为“x 1,y 1,x 2,y 2,x 3,y 3,x 4,y 4”,其中(xi,yi)表示图像中定向边界框顶点的位置。顶点按顺时针顺序排列。 以下是采用的注释方法的可视化。黄点代表起点。 它指的是:(a)飞机的左上角,(b)大型车辆钻石的左上角,(c)扇形棒球的中心。
除了位置的注释之外,为每个实例分配类别标签,其来自上述15个所选类别中的一个,同时提供难以识别的标签,其指示实例是否难以被检测(1表示难,0表示不难)
图像的注释保存在具有相同文件名的文本文件中。 在第一行,给出了’imagesource’(来自GoogleEarth,GF-2或JL-1)。 在第二行,给出’gsd’(地面采样距离,一个图像像素的物理尺寸,以米为单位)。 请注意,如果缺少’gsd’,则注释为’null’。 从注释文本文件的第三行到最后一行,给出了每个实例的注释。 注释格式为:

Dota的数据集标签转Voc2007数据集的格式:
Dota的数据集的标签是txt的格式,而Voc2007数据集的格式是xml的格式,要实现转换,就得先搞清楚Dota的数据集的标签的数据组织结构,这个文章上面介绍了。如果想要代码,可以联系我。QQ:3239516597
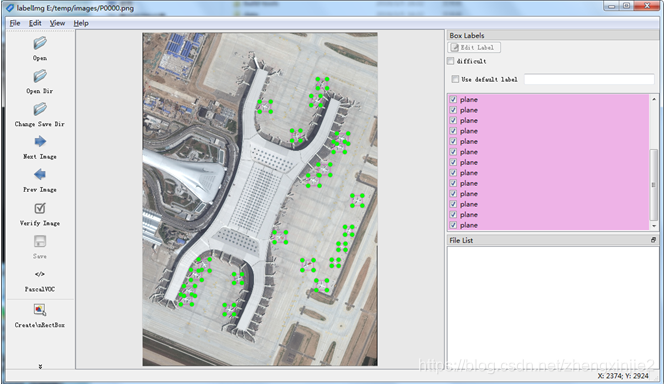
将转换后的xml和图片放在一个文件夹下,用labelImg打开检验一下转换的是对是错。如下图所示。
DOTA目标检测数据集
最新推荐文章于 2025-06-21 16:04:25 发布


















 732
732

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











