




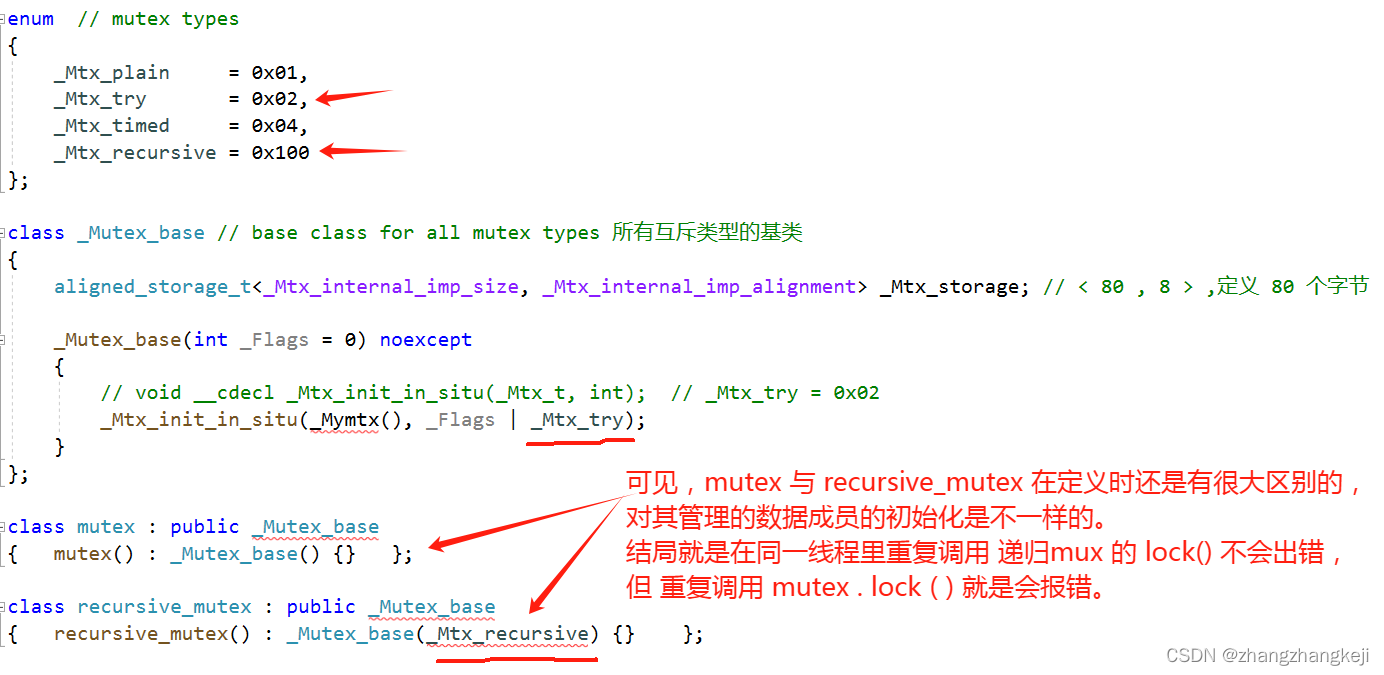
(1 探讨一) mutex 这个名称的来源是 mutual exclusion :互相排斥。 mutex 与 recursive_mutex 的数据成员的定义如下:
测试如下:
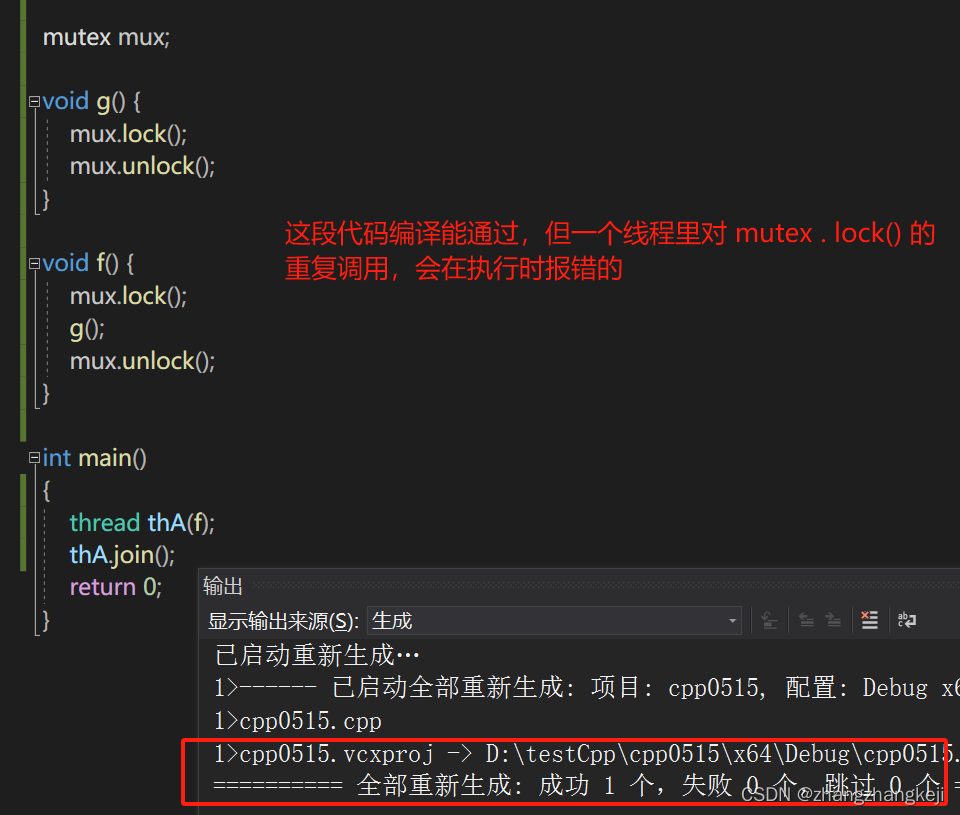
运行以下:
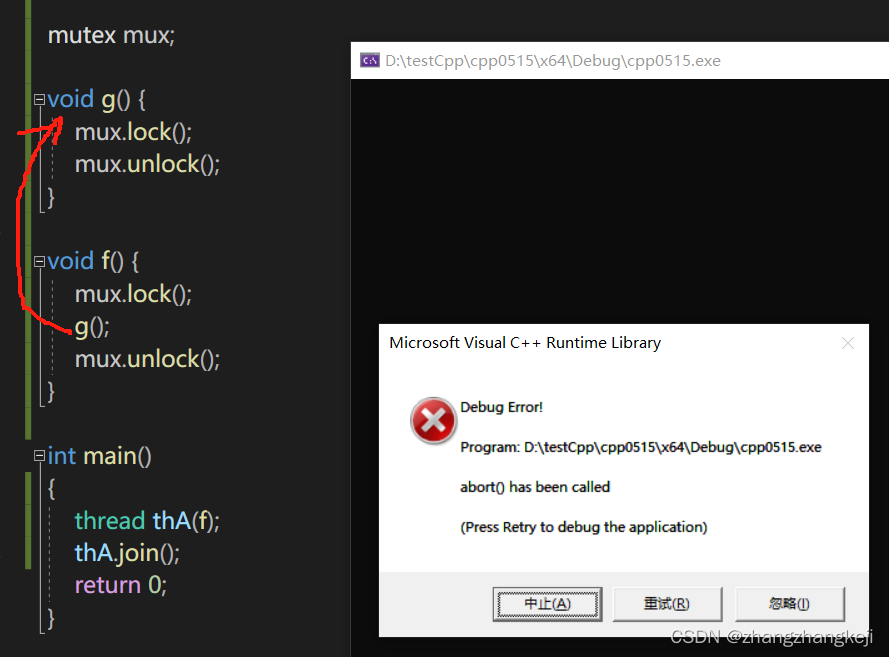
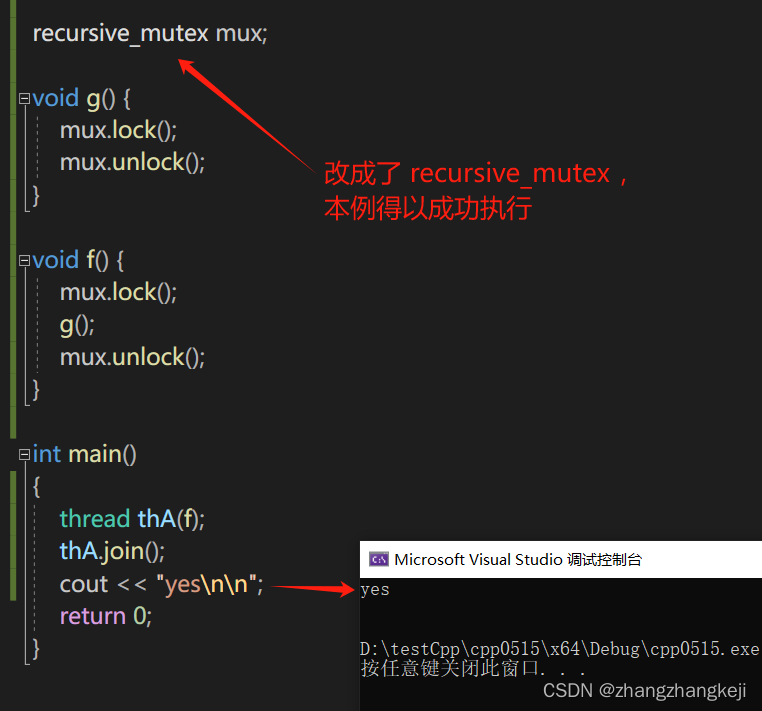
以及:
(2 探讨二) recursive_mutex 仍然是锁,对不同线程中的加锁,仍然是竞争关系,同 mutex 。测试如下:
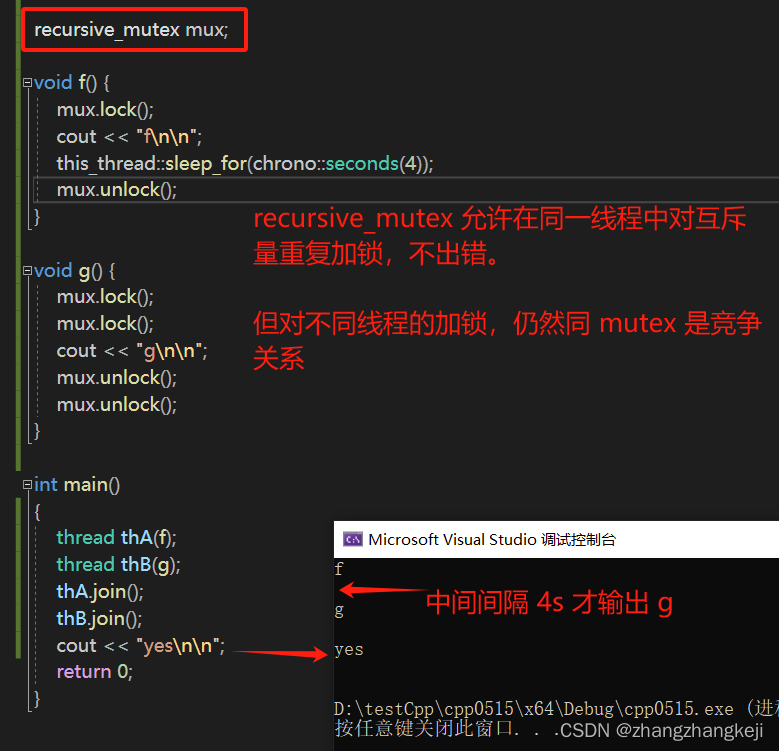
(3 探讨三) 同一线程中对 recursive_mutex 的加锁次数应该与解锁次数保持相同。否则是错误的,例如 调用 unlock() 次数少了,就会造成锁始终被本线程持有。
(4 探讨四) 这里给出 condition_variable . wait_for() 的使用例子:
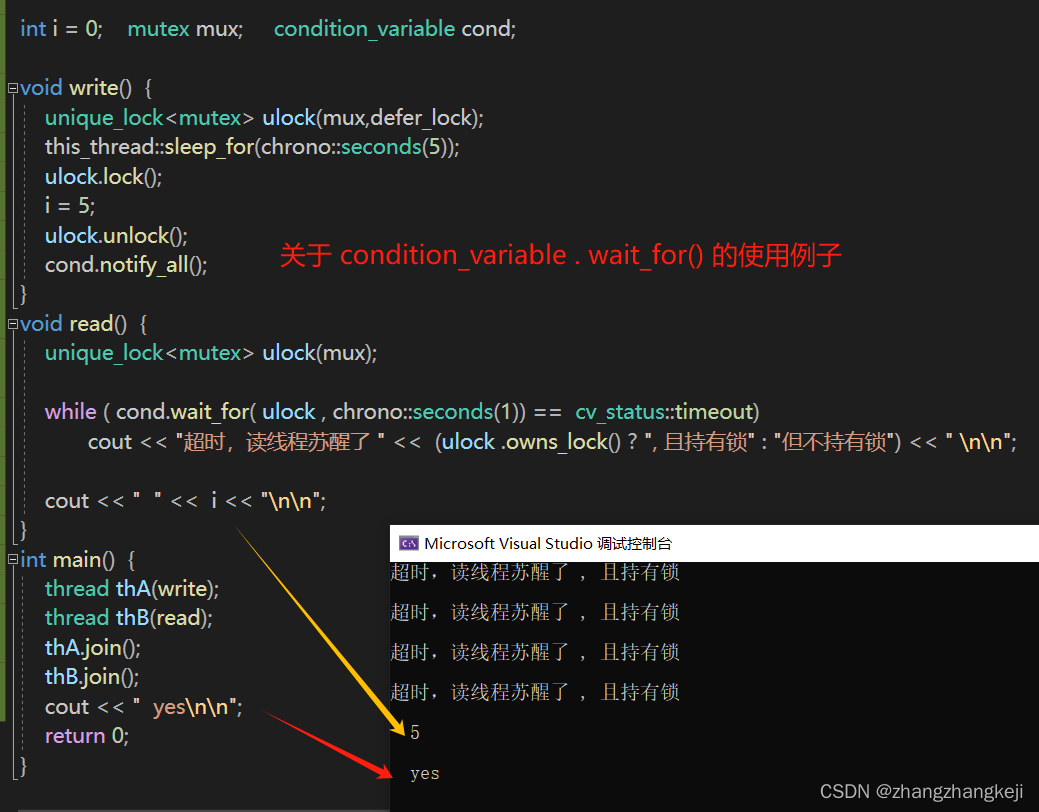
结论: condition_variable . wait() 是只等待且只能有 condition_variable .notify() 唤醒;
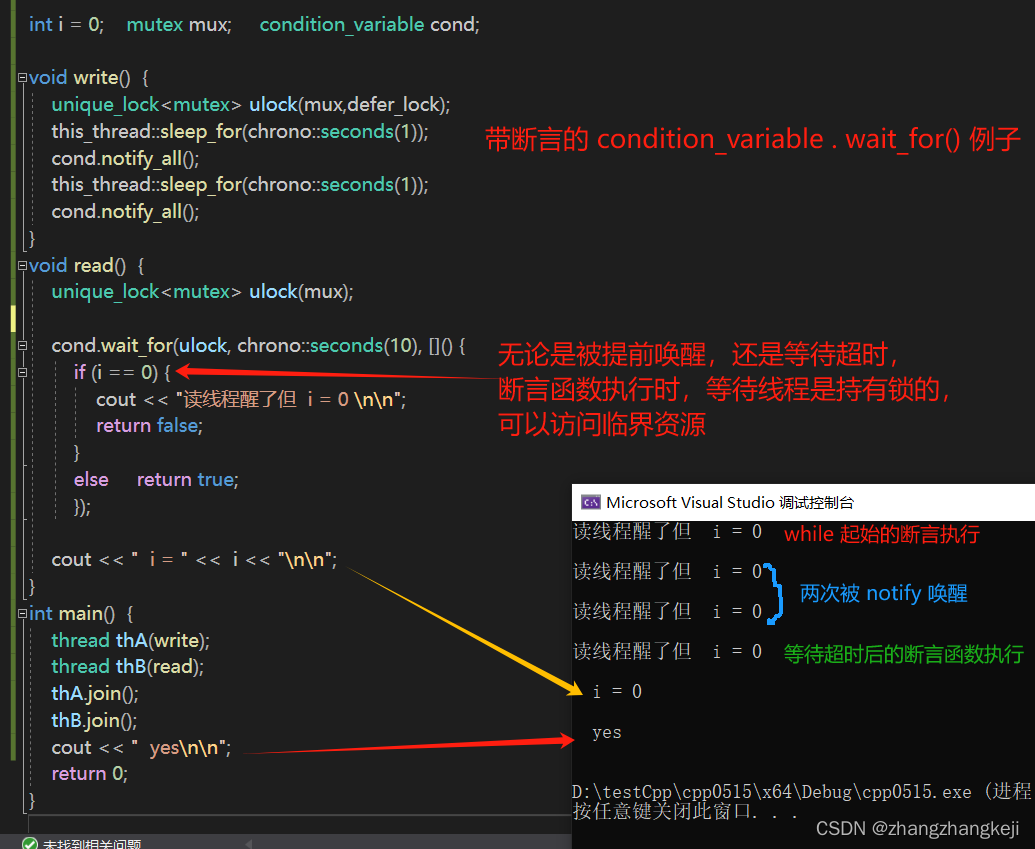
condition_variable . wait_for() 是可以被 condition_variable .notify() 提前唤醒,或者睡眠到时间了且持有锁才醒来,即使用完了睡眠时间但无法抢到锁,依然会继续睡眠。再给个带断言函数的例子,如下图:
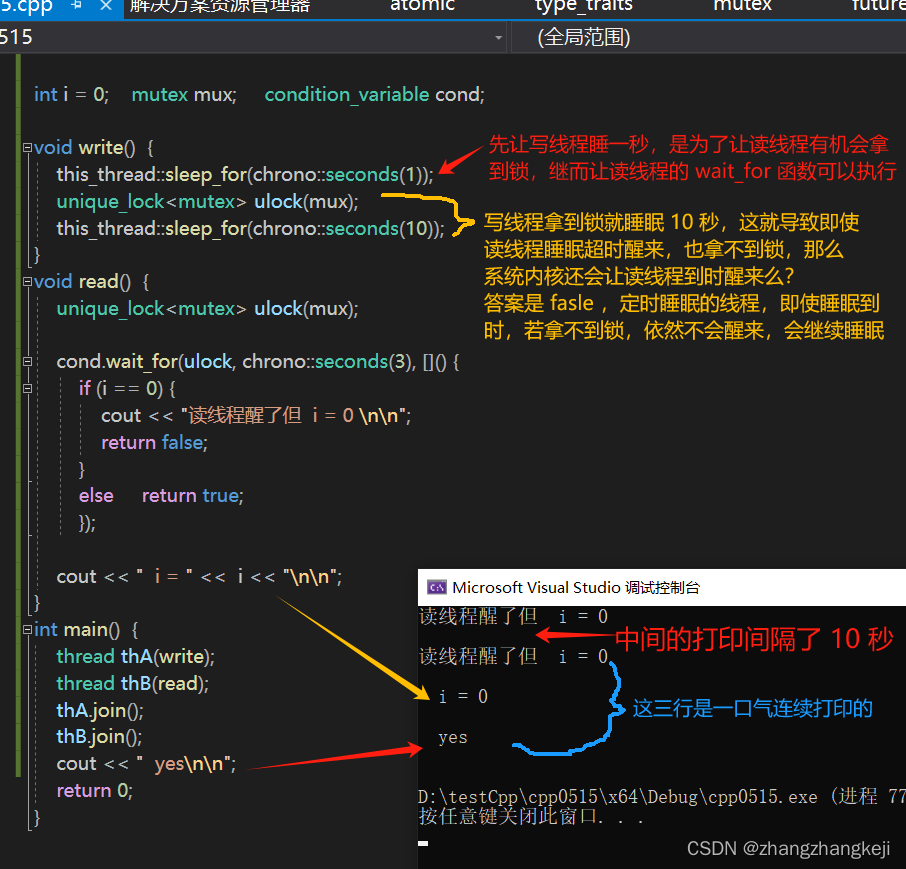
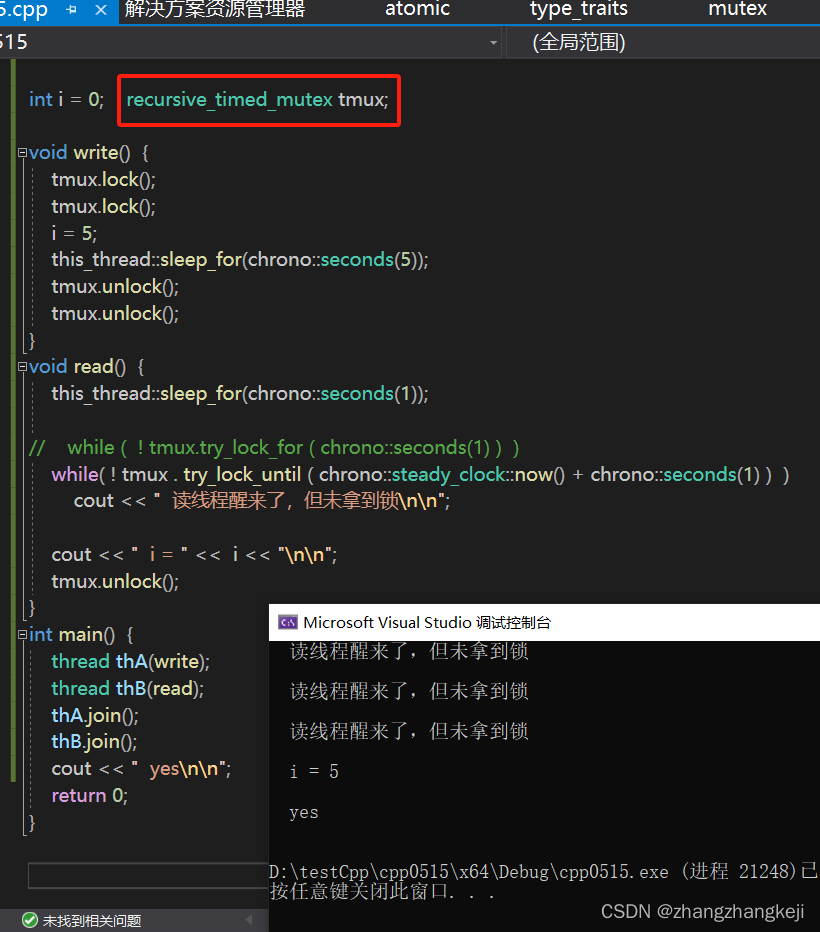
再给个例子,说明定时睡眠的线程只有再具有了锁才会超时苏醒,否则就是继续睡,超时了也继续睡:
这一切的缘由在源码里:
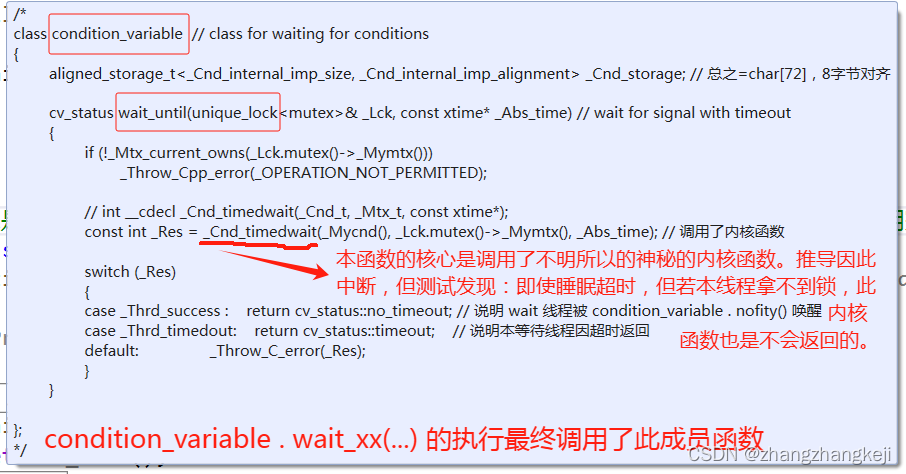
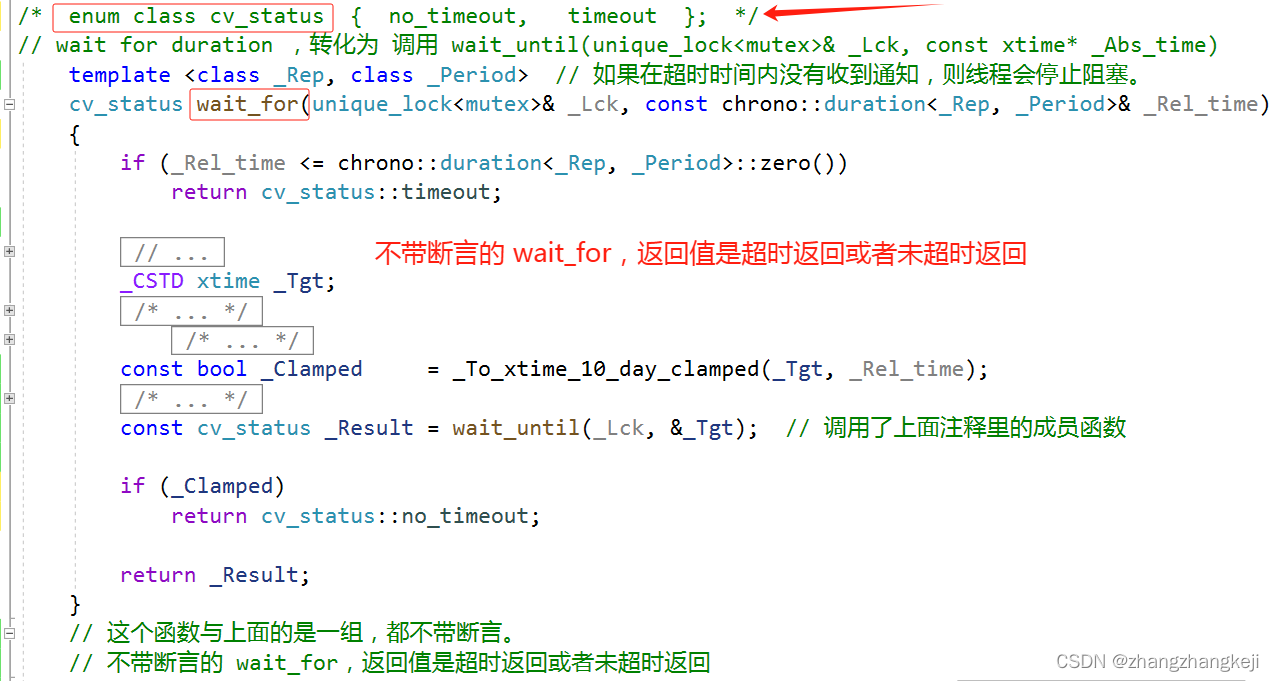
(5 探讨五) 对于 condition_variable 的成员函数:不带断言的 wait_for,返回值是超时返回或者未超时返回 ;
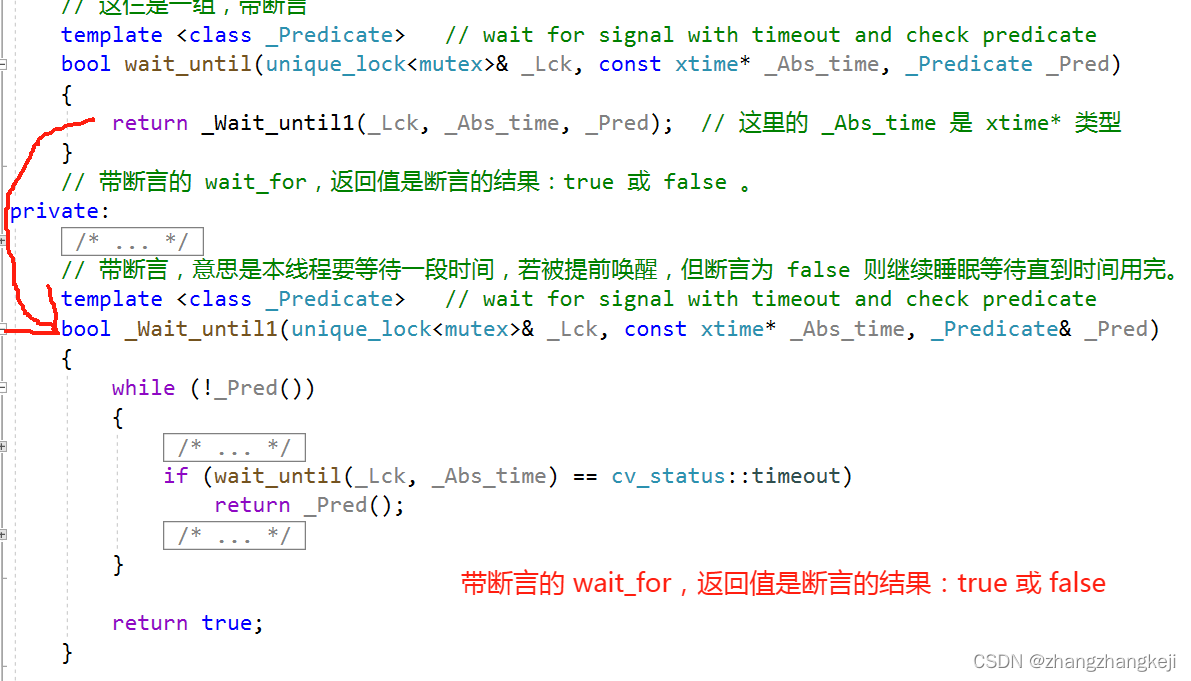
带断言的 wait_for,返回值是断言的结果:true 或 false 。
以及:
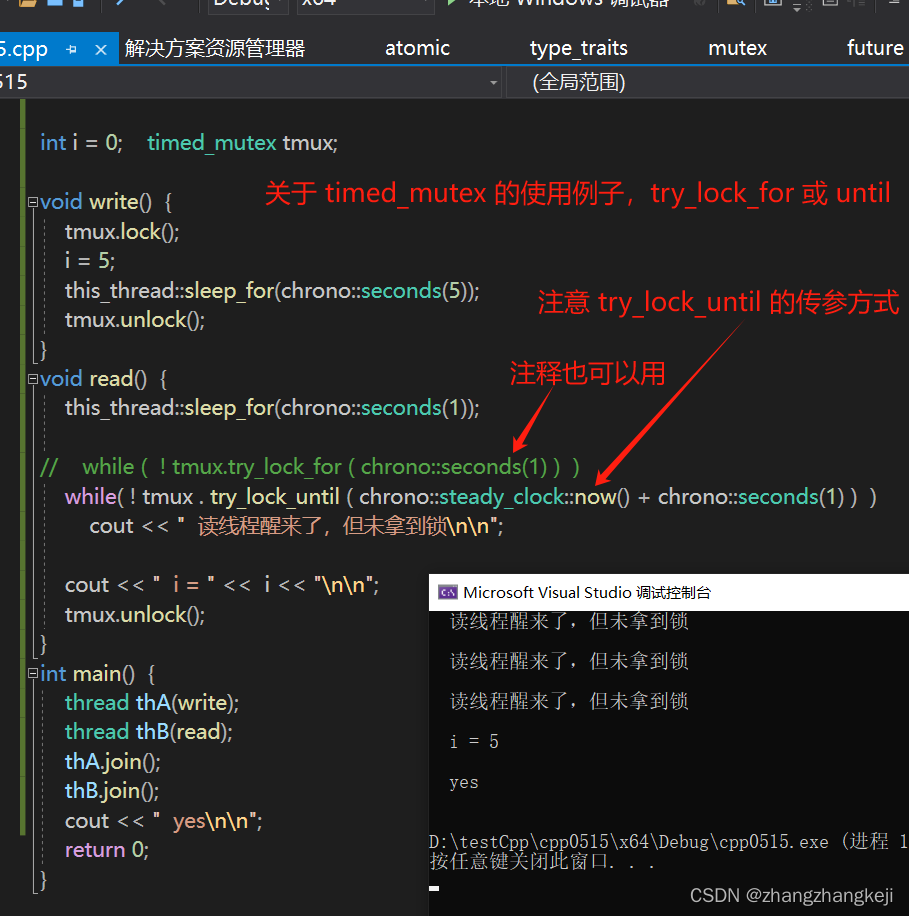
(6 探讨六) 弄清 timed_mutex 的数据结构,对于理解其功能与使用,是有帮助的:

( 7 ) 接着给出 timed_mutex 的延时申请锁的使用例子:
( 8 探讨八) recursive_timed_mutex 类具有与 timed_mutex 完全相同的功能,且允许了同一线程对 recursive_timed_mutex 的重复加锁,而不报错。而对 timed_mutex 的 lock() 在同一线程的重复调用会导致程序出错。如下图:
谢谢


















 5921
5921

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











