




CAN通信:EB中配置CAN驱动,配置参数解析
以S32K314芯片说明,其他芯片不同,参数配置也有差异
1. General
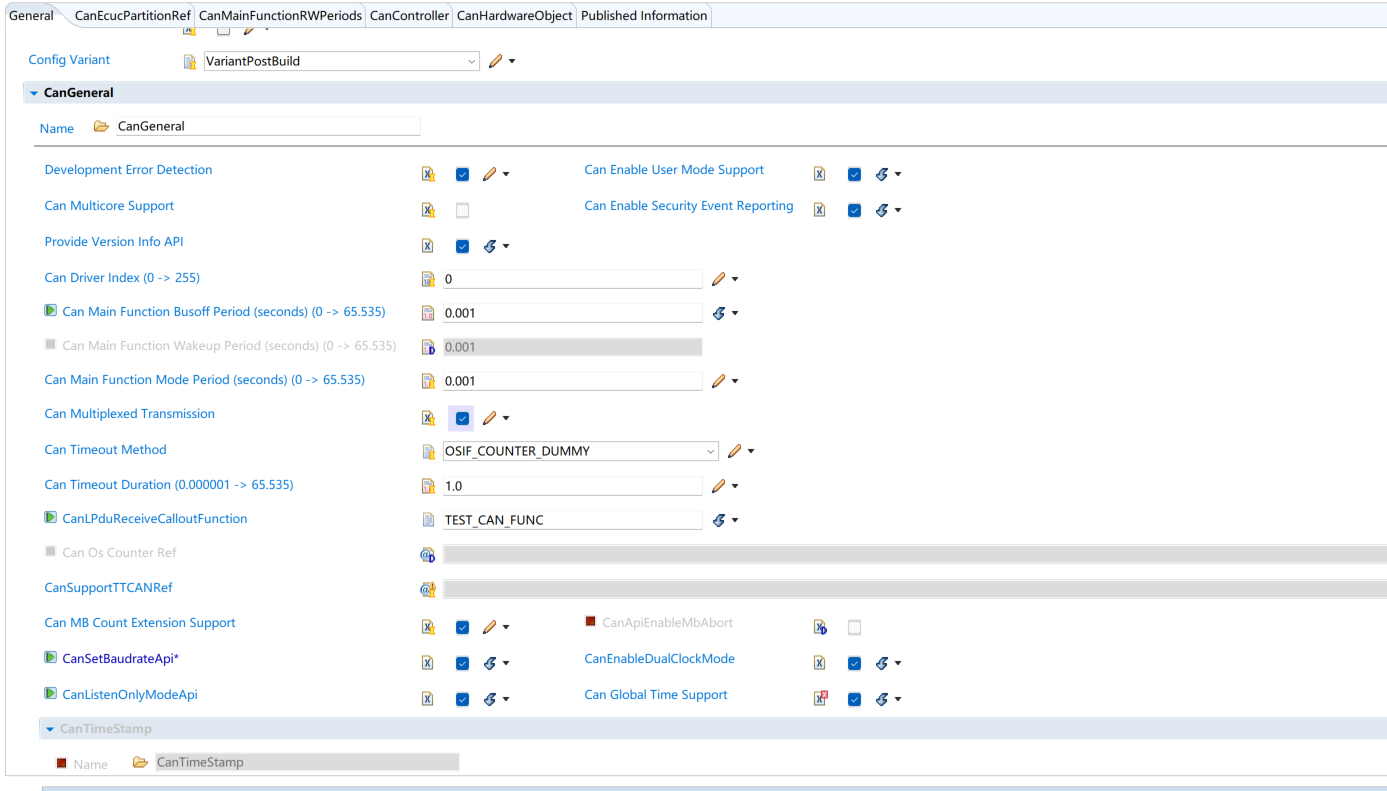
- Development Error Detection:是否使能开发错误检测,与AUTOSAR的DET相关。
- Can Enable User Mode Support :是支持模式切换,从用户态切换到内核态。确保只有系统权限能操作CAN驱动。
- Can Multicore Support :是否支持多核,与芯片相关。
- Can Enable Security Event Reporting:未知
- Provide Version Info API :是否提供版本信息
- Can Driver Index (0 -> 255) :CAN控制器ID,唯一
- Can Main Function Busoff Period (seconds) (0 -> 65.535):处理总线busoff周期,防止总线因为busoff时间过长导致卡死,但是正常情况下一般不启用,因为busoff需要用户主动处理。
- Can Main Function Wakeup Period (seconds) (0 -> 65.535) :唤醒周期,一般唤醒CAN会用到;
- Can Main Function Mode Period (seconds) (0 -> 65.535):调用CAN main function的周期,can有三种模式,周期,中断,DMA,如果使用周期轮询的方式读取CAN数据,则必须使用对应的函数,非强制;
- Can Multiplexed Transmission :如果Can Hw Object Count大于1,则必须使能;
- Can Timeout Method:CAN超时时使用的计数器来源
- Can Timeout Duration (0.000001 -> 65.535) :超时时间
- CanLPduReceiveCalloutFunction :于在接收到 CAN 消息时进行自定义处理。它允许开发者根据特定需求决定是否将接收到的 LPDU 数据上传至 COM 层。
- Can Os Counter Ref :包含对 OsCounter 的引用,OsCounter 是 CAN 驱动程序用于计时和调度的操作系统计数器。此参数确保与系统时钟或其他计时机制同步,从而增强 CAN 通信的可靠性
- CanSupportTTCANRef :此参数指示是否支持时间触发 CAN (TTCAN)。如果需要,启用时间触发 CAN (TTCAN) 支持。配置 TTCAN 特定的设置和参数,以启用 CAN 网络中的时间触发通信功能。
- Can MB Count Extension Support :扩展MB数量,与硬件相关,S32K314中配置无效
- CanApiEnableMbAbort:开启关闭CAN MB的API,此功能未用;猜测和内存相关,根据手册描述,如果MB剩余,可将其是为正常的RAM,应该与此相关
- CanSetBaudrateApi:修改波特率
- CanEnableDualClockMode:CanEnableDualClockMode 是 AUTOSAR CAN 驱动模块中的布尔型参数(boolean),用于控制是否启用 双时钟模式(Dual Clock Mode)。双时钟模式是一种增强型时钟同步机制,允许 CAN 控制器同时使用两个独立的时钟源(如主时钟和备用时钟),或支持主从节点间的时钟动态切换,以提升总线同步的可靠性和灵活性。
- CanListenOnlyModeApi:CanListenOnlyModeApi 是布尔型参数(boolean),用于控制是否启用 监听模式(Listen Only Mode)的 API 接口。监听模式指节点仅接收并解析总线消息,不发送任何数据(包括确认位),常用于诊断、监控或调试场景。启用该参数后,上层应用可通过 API(如 Can_EnterListenOnlyMode()、Can_ExitListenOnlyMode())动态切换节点的监听状态。
- Can Global Time Support:CanGlobalTimeSupport 是布尔型参数(boolean),用于控制是否启用 全局时间支持(Global Time Suppor
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 4226
4226

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









