



前言
在支持CAN3芯片的硬件基础上以及Ardupilot的4.0.4源码添加支持CAN3驱动
问题描述:
https://discuss.ardupilot.org/t/how-to-use-can3-port-in-pixhawk4/118521
Ardupilot中的CAN的驱动可以自行研究或者网上找资源理解学习。
二、修改步骤
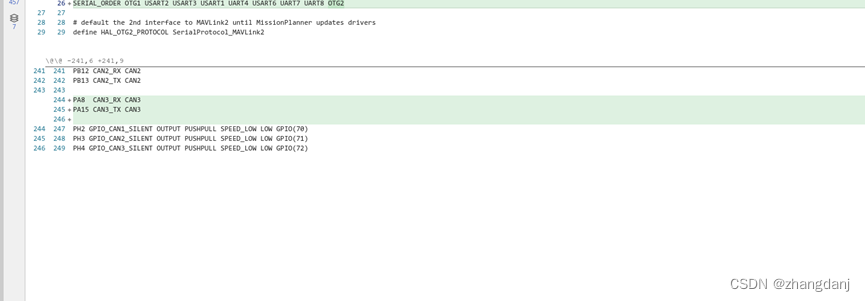
定义引脚,前提是芯片能够支持CAN3
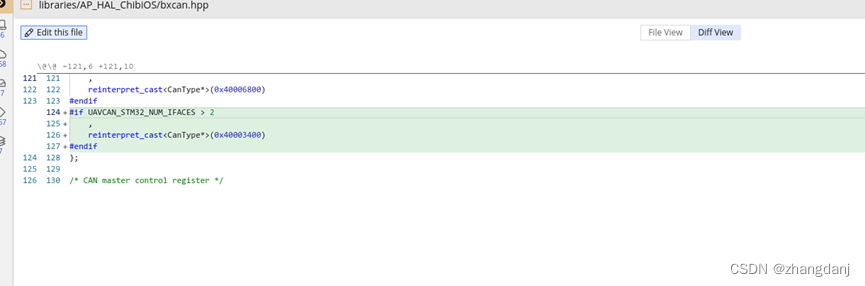
添加CAN3寄存器地址
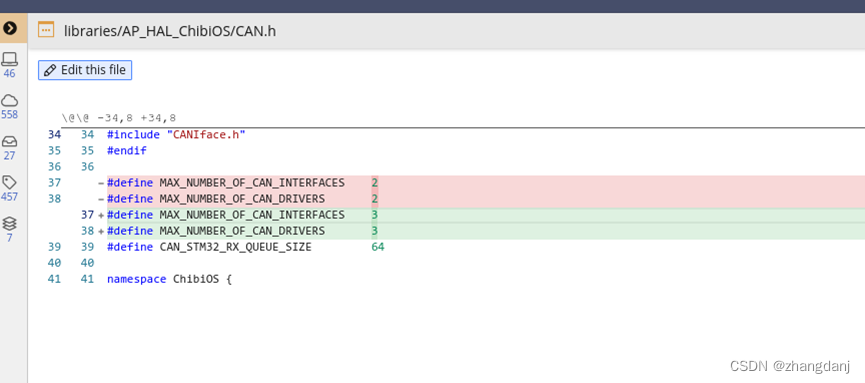
修改应用层初始化的CAN口的宏定义
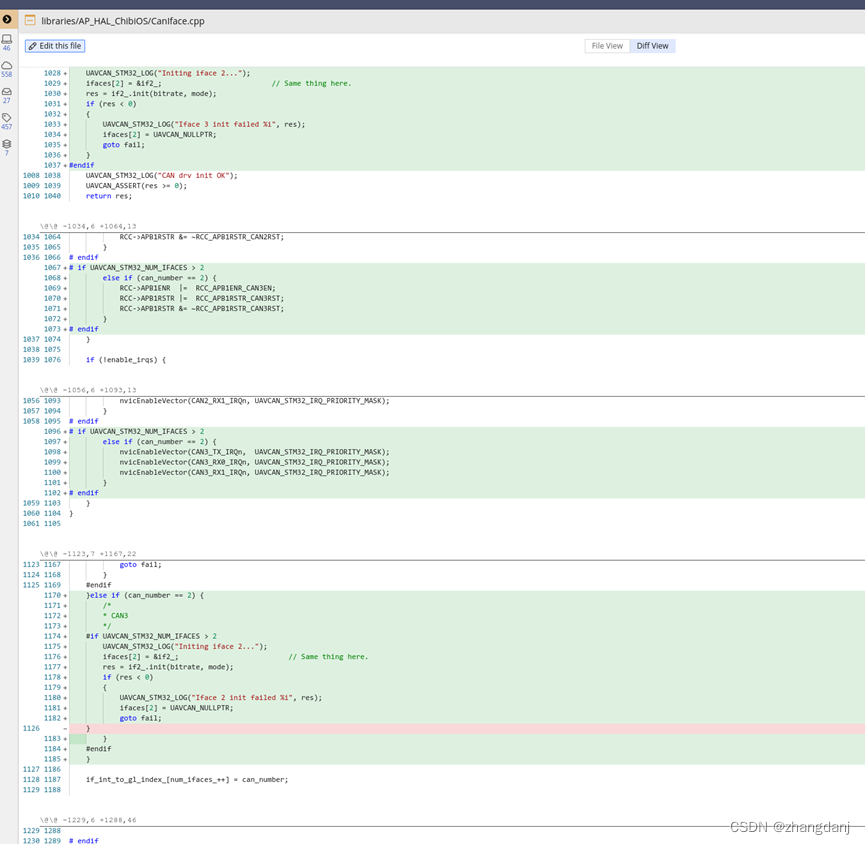
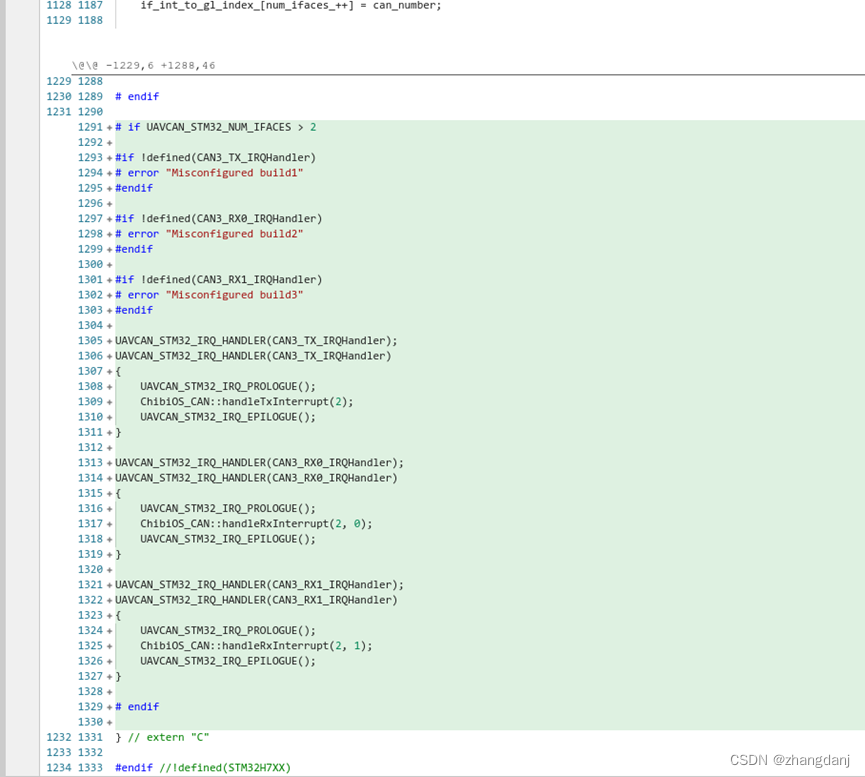
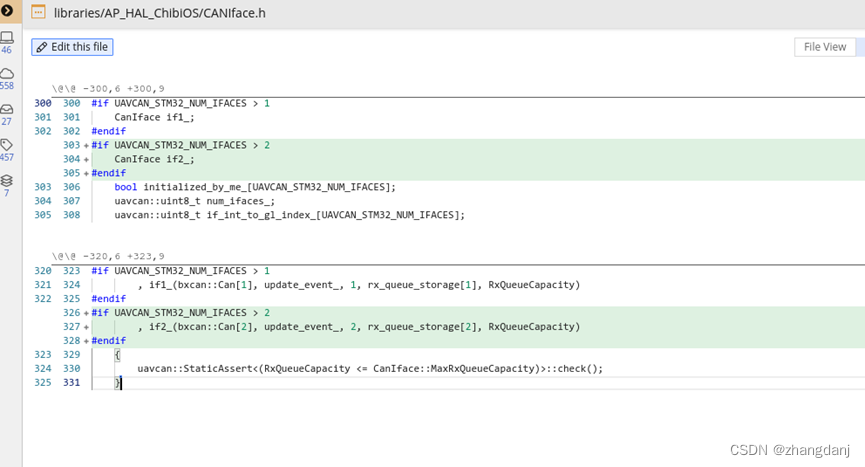
添加中断以及驱动代码
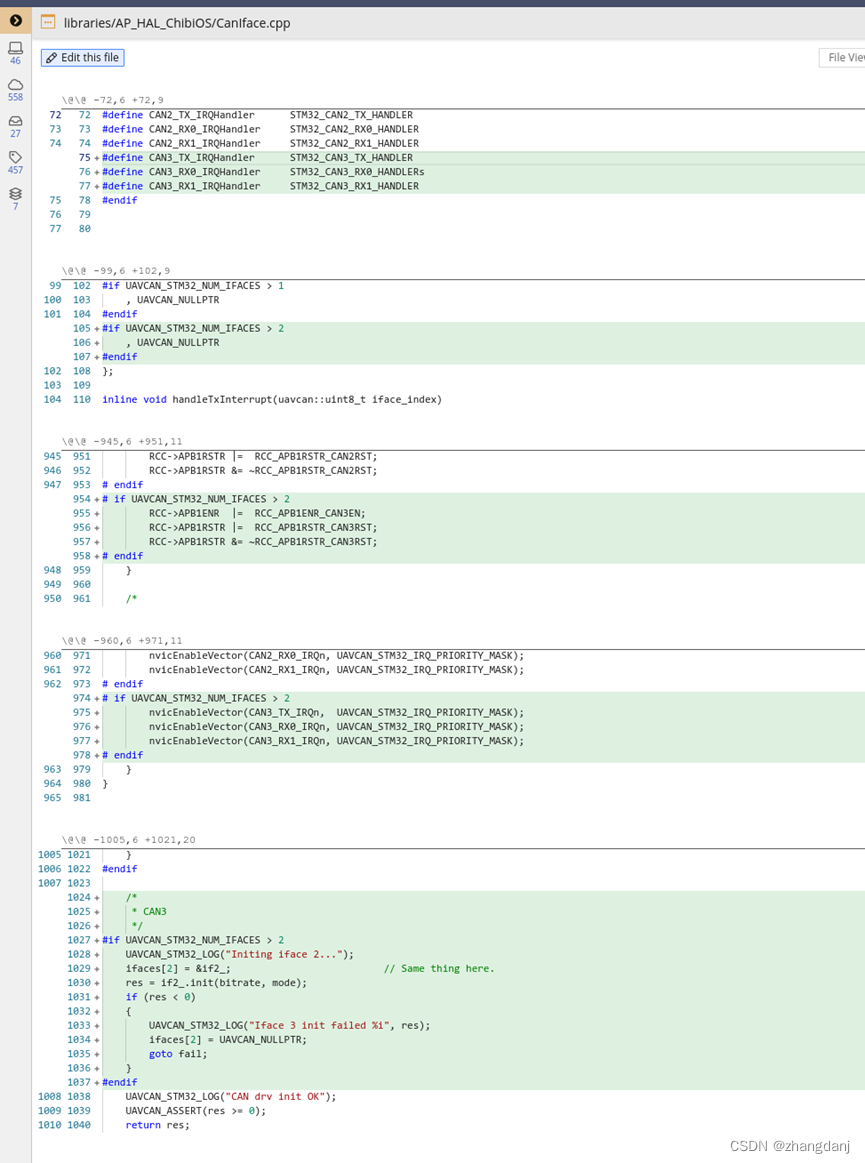
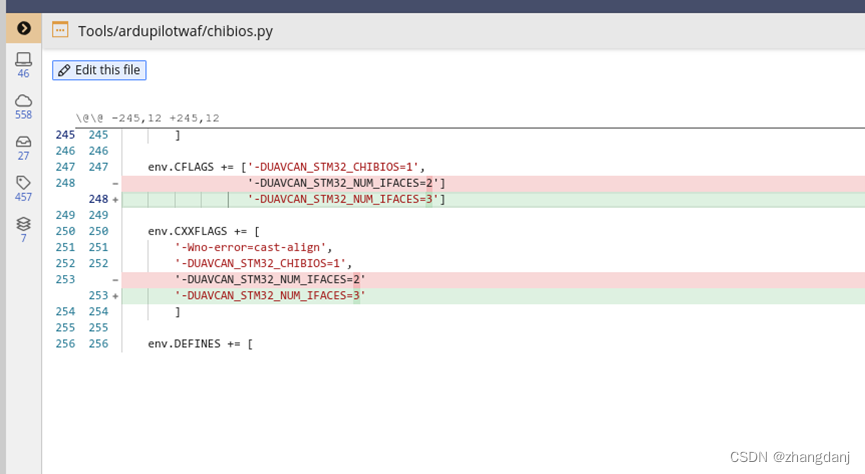
修改UAVCAN_STM32_NUM_IFACES定义值
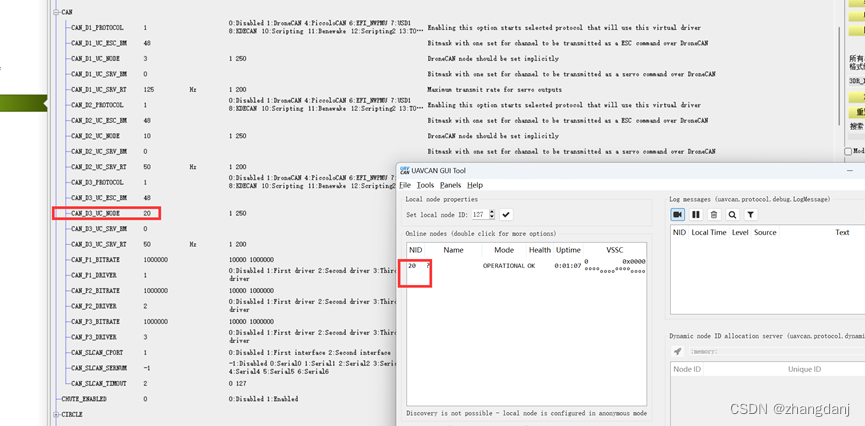
编译下载程序。参数协议选择UAVCAN,节点设置20,接线CAN3接口,使用UAVCAN tool工具能稳定识别。
+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
时间分割线,由于发现该驱动发送数据正常,但是接收数据中断未触发,经过调试需要作如下修改

完美解决。
总结
作业答案,不需要理会过程(懒得写)

















 6430
6430

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









