




 目前出色的深度去噪方法多采用监督学习,需建立训练数据集,其质量决定去噪结果。去噪数据集建立主要有三种方式,各有利弊,实际中常结合使用。文中还总结了现有真实噪声图像数据集,指出深度去噪数据集建立仍存在多场景图像获取、高质量参考图像获取等问题。
目前出色的深度去噪方法多采用监督学习,需建立训练数据集,其质量决定去噪结果。去噪数据集建立主要有三种方式,各有利弊,实际中常结合使用。文中还总结了现有真实噪声图像数据集,指出深度去噪数据集建立仍存在多场景图像获取、高质量参考图像获取等问题。
Introduction
目前效果出色的深度去噪方法大都采用监督学习的方法,需要采集输入-输出图像对(noisy/noise-free images pairs)建立训练数据集。数据集的建立是关键的任务。数据集的质量将直接决定去噪结果的质量。如何获取尽量多场景的图像数据,如何获得高质量的参考图像(ground truth),是目前研究的热点。
The State of Arts
Method
目前去噪数据集的建立主要分为以下三种方式:
- 从现有图像数据库获取高质量图像,然后做图像处理(如线性变化、亮度调整)并根据噪声模型添加人工合成噪声,生成噪声图像;
- 针对同一场景,拍摄低ISO图像作为ground truth,高ISO图像作为噪声图像,并调整曝光时间等相机参数使得两张图像亮度一致;
- 对同一场景连续拍摄多张图像,然后做图像处理(如图像配准、异常图像剔除等),然后加权平均合成ground truth;
这几种方法各有利弊:
第一种方法比较简单省时,高质量图像可以直接从网上获取,但由于噪声是人工合成的,其与真实噪声图像有一定差异,使得在该数据集上训练的网络在真实噪声图像上的去噪效果受限;
第二种方法只使用单张低ISO图像作为ground truth,难免会残留噪声,且与噪声图像可能存在亮度差异和不对齐的问题;
第三种方法需要拍摄大量图像,工作量比较大,且需要对图像进行严格对准,但一般得到的ground truth质量比较高;
在实际应用中,这三种方法都有被采用,并相互结合。一般在网络训练初期,会采用第一种合成噪声图像的方法,快速获得数据集对网络进行训练。如DnCNN,burst kernel predict network等都采用了这种方式。而为了应用于真实环境中,现在越来越多的方法采用真实噪声图像进行网络训练。
但是,有一个值得考虑的问题是,为了提高去噪网络的鲁棒性和泛化能力,常常需要将输入噪声图像的噪声水平估计也作为网络输入。而真实噪声图像的噪声水平估计往往存在一定误差,从这一方面考虑,合成噪声图像由于噪声模型已知,所以其噪声水平估计是准确的,有利于网络的在不同噪声水平上的泛化。CBDNet就考虑将真实噪声图像和合成噪声图像一起作为训练集,交替对网络进行训练以提升网络的性能。
Datasets
下面简单总结一下现有的真实噪声图像数据集(即第二和第三种方法建立的数据集)。
其中数据集数量以不同的场景与拍摄设备计算(即对同一场景用同一设备在同一参数下连续拍摄多张以一张计算)。
| 名称 | 年份 | 类型 | 数量 | 链接地址 |
|---|---|---|---|---|
| RENOIR | 2014 | 第二种(Low/high-ISO images pair) | 120张 | project |
| Nam | 2016 | 第三种(multi-images mean) | 15张 | project |
| DND | 2017 | 第二种(Low/high-ISO images pair) | 50张 | project |
| PolyU | 2018 | 第三种(multi-images mean) | 40张 | github |
| SIDD | 2018 | 第三种(multi-images mean) | 200张 | project |
具体情况如下:
RENOIR
参考论文:RENOIR - A Dataset for Real Low-Light Image Noise Reduction
拍摄了120个暗光场景,包含室内和室外场景。每个场景约4张图像,包含2张有噪声图像和两张低噪图像。

Nam
参考论文:A Holistic Approach to Cross-Channel Image Noise Modeling and its Application to Image Denoising
仅包含11个场景,且多是相似物体和纹理。针对这11个场景共拍摄了500张JPEG图像。

DND
参考论文:Benchmarking Denoising Algorithms with Real Photographs
拍摄50个场景,包括室内和室外场景。

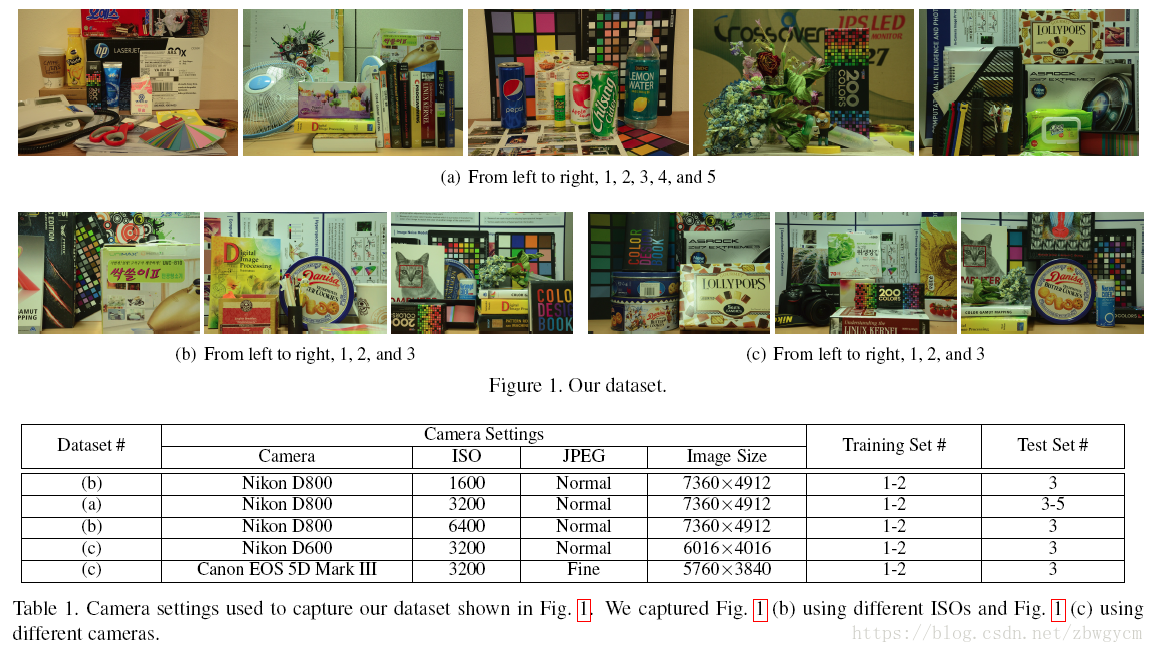
PolyU
参考论文:Real-world Noisy Image Denoising: A New Benchmark
拍摄了40个场景,包括室内正常光照场景和暗光场景,室外正常光照场景。对每个场景连续拍摄了500次。

SIDD
参考论文:A High-Quality Denoising Dataset for Smartphone Cameras
用5个相机(Google Pixel、iPhone 7、Samsung Galaxy S6 Edge、Motorola Nexus 6、LG G4)在四种相机参数下拍摄了10个场景,200个场景实例,每个场景连续拍摄了150张图像。其中160个场景实例作为训练集,40个场景实例作为测试集(the benchmark)。
具体数据集参数可参考项目主页。
Conclusion
目前来说深度去噪数据集的建立,仍然有许多问题解决,其主要集中在几个方面:
- 多场景、多设备图像的获取;
- 高质量ground truth的获取;
- 更加符合真实噪声分布的噪声模型的建立;
- 更加准确的噪声水平估计方法;
想要建立适用于广泛场景和噪声水平的深度去噪网络还是非常困难,针对于特定应用场景(暗光室内场景等)的噪声建模和去噪网络还是值得做进一步深入研究的。

















 1970
1970

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









