




 本文详细介绍了如何在ROS环境中安装和配置LOAM_velodyne激光雷达里程计软件包,包括必要的git克隆、catkin_make构建、源码路径设置及运行节点和加载配置的具体步骤。
本文详细介绍了如何在ROS环境中安装和配置LOAM_velodyne激光雷达里程计软件包,包括必要的git克隆、catkin_make构建、源码路径设置及运行节点和加载配置的具体步骤。
1.安装loam_velodyne
$ cd ~/catkin_ws/src/
$ git clone https://github.com/laboshinl/loam_velodyne.git
$ cd ~/catkin_ws
$ catkin_make -DCMAKE_BUILD_TYPE=Release
$ source ~/catkin_ws/devel/setup.bash
2.运行节点
roslaunch loam_velodyne loam_velodyne.launch
3.加载
roslaunch velodyne_pointcloud 32e_points.launch calibration:=/home/你的用户名/catkin_ws/src/velodyne/velodyne_pointcloud/params/32db.yaml
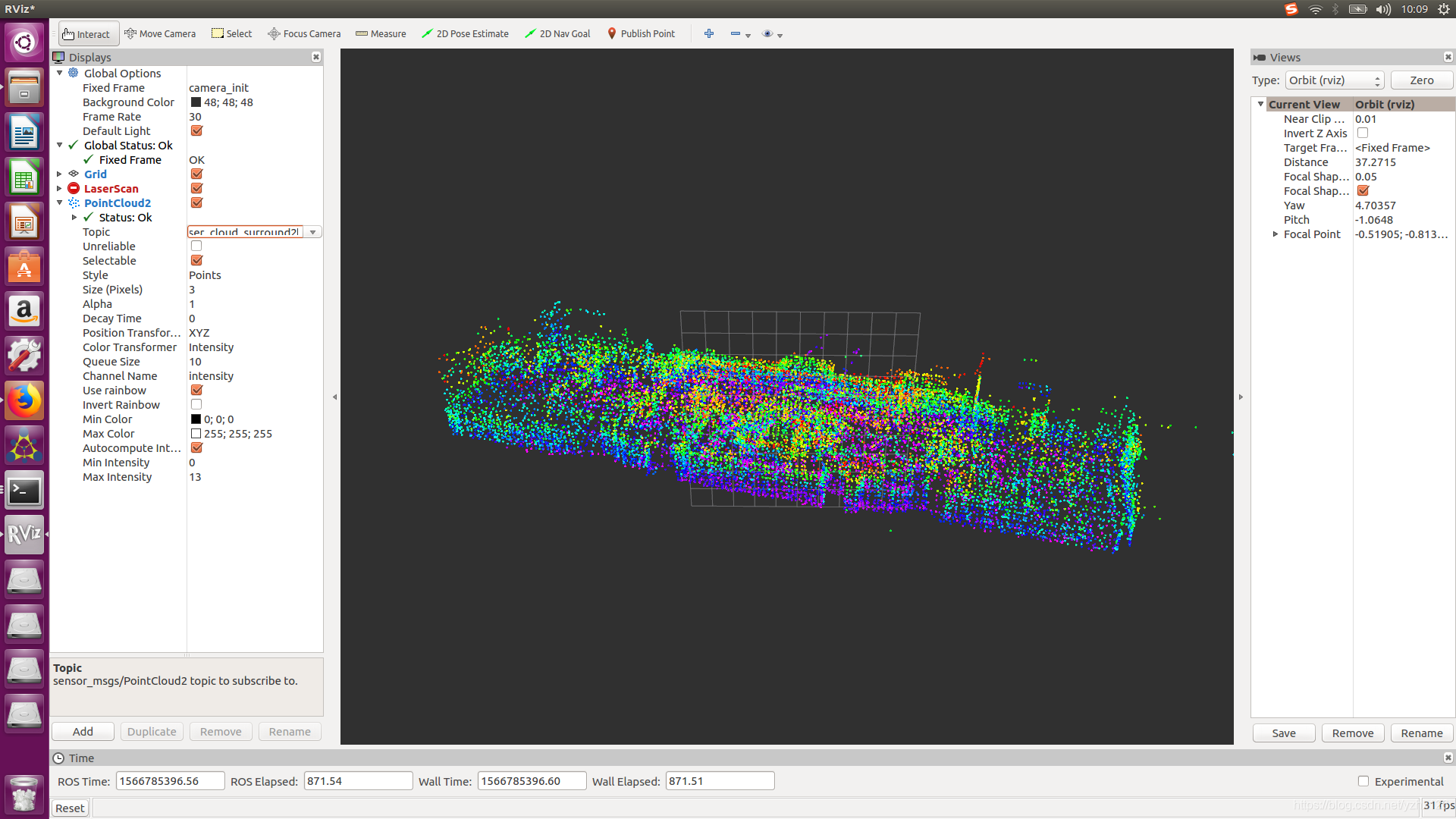
4.运行结果

















 1115
1115

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









